



基於(yú)視覺伺服的(de)小(xiǎo)型四旋翼無人機自主飛行控製研究進展
2017-6-16 來源(yuán):裝甲(jiǎ)兵工程學院控製工(gōng)程係(xì) 作者:呂(lǚ)強(qiáng),馬建業,王國勝,林輝燦,梁冰
摘要:在GPS信號較弱甚至失效的環境下,視覺伺服能夠通過視覺信息控製自主飛行,因此近(jìn)年來視覺伺服在(zài)自主飛行控製領域受到廣泛關注。根據獲取的圖像信息不同,可將視覺伺(sì)服分為基於位置的(de)視覺伺(sì)服和基於圖像的視覺伺服。與基於圖像的(de)視覺伺(sì)服相比,基於位置(zhì)的視覺伺(sì)服(fú)位姿估計穩定,可直觀地在直(zhí)角(jiǎo)坐標空間定義機器人運動,符合機器人工作方式,且控製器設計簡單,但控製精度受攝像機和機器(qì)人(rén)標定精度的(de)影響,且計算量較(jiào)大。對於小型四旋翼無人機(jī)自主飛行控(kòng)製的應用研究中,視(shì)覺伺服(fú)的實(shí)時性、精確性和魯棒性尚(shàng)待提高,且小型四旋翼無人機(jī)的智能化不高,在室內室外模式轉換及室內協同控製方麵還有廣闊的發展空間。
關鍵詞 視覺伺服;自主飛行控(kòng)製;小型四旋翼無人機(jī)
無人(rén)機正(zhèng)快速成(chéng)為一(yī)種無處不在的現代工具,它在搜索、救援、監視、航拍、遠程遙感等領域已得到(dào)廣泛應用[1-5],更被應用於電線檢修[6]和農業感(gǎn)知[7]等特殊領域。與有人駕駛的飛行器和固定翼(yì)無人機相比,小型四旋翼無人機由於體型小、可垂(chuí)直起降(jiàng)、機動靈敏等特點(diǎn),使(shǐ)針對狹窄空間的搜索成為可(kě)能,並且在室內進行飛行測試更加方便;此外其以電池替代燃料驅動,即使發生碰撞(zhuàng)也不會對人類造成嚴重威脅,安全性(xìng)得到大幅提升。近年(nián)來,小型四旋翼無人(rén)機因體型小、造(zào)價低、易操作、易維護和適用(yòng)於嚴峻環境等(děng)特(tè)點,已逐步成為無人機(jī)研究的熱點。目(mù)前,室(shì)外自主飛行器普遍采用 GPS 係統實現定位,然而 GPS 信號強弱問題大大影響定位精度,尤其是在室內、森林、洞穴以及(jí)建築物繁多的城市等GPS較弱甚至失效的環境中,需要一個可靠的方法來(lái)控製飛行器自主(zhǔ)飛行[8],因此視覺伺服受到了研究人員的青(qīng)睞。在(zài)機載處理信息的情況下,視(shì)覺(jiào)伺服可以被應用到獨立且GPS失效的環(huán)境中,視覺伺服通過攝像頭獲取視(shì)覺(jiào)信息控製(zhì)飛行器運(yùn)動,攝像頭不僅具有輕便、低損耗(hào)等特性,而且能夠提供位置及(jí)速度信息的高分辨率數據;另外,GPS的精確度隻(zhī)能達到米級(jí),而視(shì)覺算法在室內(nèi)小環境下能將目標定位(wèi)上升到厘米級精度[9-10],這也使得旋翼型無人機能夠執行更精準的任務。視覺伺(sì)服已經被廣泛應用到了避障、測距、懸停以及同時(shí)定位與地圖(tú)構建(SLAM)等任務中[11-15]。
1.視覺伺服
視覺伺服指的是利用計算機視覺信息控製機器人的運(yùn)動,依賴(lài)於圖像處理、計算機視覺和控製理論等技術。所有基於視覺伺服的方案,目的都是減小誤差(chà)e(t)[16]。誤差e(t)可表示為
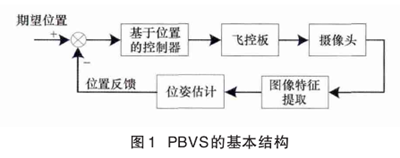
上述為大多數視覺伺服的基本概念[16]。對(duì)於視覺伺服的分類,可以理解為不同的視覺伺服方法從(cóng)圖像中獲取的信息不同[16]。事實上,在PBVS中,視覺傳感器被認為是三維傳感器,因為其利用視覺算法構建三維空間,獲取深度信息,進而實(shí)現位置估計。但(dàn)是控製定律是在笛(dí)卡兒(ér)空間中定義的,這使得(dé)攝像頭在笛卡兒空間能夠跟蹤最優軌(guǐ)跡,而在(zài)圖像空間則不能跟蹤最優(yōu)軌跡,所以當僅有(yǒu)一張圖像時,即使在圖像測量(liàng)中很小的錯誤(wù)都會導致位姿出現誤差,這嚴(yán)重地影響了係統(tǒng)的準確(què)性。在多旋翼飛(fēi)行器應用中PBVS的基本結構(gòu)如圖(tú)1所示。
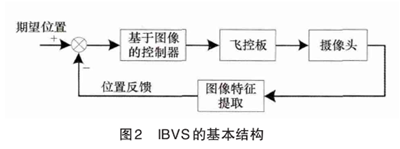
另一方麵,在IBVS中,視覺傳感(gǎn)器被認為是二維傳感器,因為其直接(jiē)從圖像空間中提取特征,當(dāng)采用單目攝像頭(tóu)時,這顯得更加逼真,而且使得IBVS對(duì)於(yú)校準和(hé)圖像噪音引起的誤差表現出顯(xiǎn)著的魯棒性。然而IBVS並不是沒有缺點,當移位過大,攝像頭會達到局部最小值或跳過交互矩陣的奇點,從而不可預知攝像頭(tóu)的運動。在多旋(xuán)翼飛行器應用中 IBVS的基(jī)本結構如圖2所示。
2.視覺伺服(fú)在自主飛行控製中的應用
視(shì)覺伺服在(zài)小型四旋翼無人機自主飛行控(kòng)製方(fāng)麵得到了廣泛研究,主要是 PBVS 和(hé) IBVS,雖然取得了一定成果,但是兩種視覺伺服方案都存在各自的缺點,還有(yǒu)很大的研究(jiū)和發展空間。下麵從PBVS和(hé)IBVS兩方麵闡述近5年來視覺伺服(fú)在小(xiǎo)型四旋翼(yì)自主飛行控製方(fāng)麵的主要研究進(jìn)展。 PBVS和IBVS的主要優(yōu)缺點如表1所示。
表1 PBVS及IBVS的特點
2.1 基於(yú)位置的視覺伺服
2011年,Li等[17]設計了一種多機器(qì)人地空係統,采用Asc Tec四旋翼機(jī)載(zǎi)處理視覺信息,通過(guò)單目(mù)攝像頭、慣性測量(liàng)單元(IMU)、飛行計算機等機(jī)載資源(yuán)和多傳感器融合(MSF)、光流(liú)、紅外標記(jì)等方法,獲得了精(jīng)準的位姿估計和(hé)運動估(gū)計。為了實現四旋翼在地麵機(jī)器人上平穩起飛、穩定跟蹤和安全降落,設(shè)計了相應的滑模控製器;還設計了數(shù)據(jù)同步和時間延遲補償,以提高係統性能。利用標記(jì)物輔助四旋(xuán)翼進行位置估計(jì)的研究很多,Carrillo 等[18]采用標(biāo)記物方法進行位置估計,提出一種基於視覺的位置控製(zhì)方法,提高了四旋翼無人機飛(fēi)行的自主(zhǔ)性(xìng)。計算機視覺方法主要包括降落標(biāo)記點檢測(cè)算法與跟(gēn)蹤算法,通過已校準的機載(zǎi)單目攝(shè)像頭估計四旋翼(yì)相對(duì)於降(jiàng)落板的位置和線性速度,其中線性速度是通過(guò)光流法估計的。為了體現視覺算法的性能,采用基於(yú) PD 控製器的簡易(yì)控製策略(luè)控製高度和偏航角,采用基本的全狀態反饋(kuì)控製(zhì)器(qì)控製俯仰和橫滾角。除此之外,Romero等(děng)[19]也采用特殊標記物(wù)輔助(zhù)計算機視覺來解決(jué)四旋翼的穩定性和局部定位問題。將 IMU 獲得的姿態數據和單個(gè)攝像(xiàng)頭組成的視覺係統獲得的視覺數據進行融合,用來估計四旋翼的方向和位置。視覺係統估計(jì)四旋翼的位置(zhì)、偏航(háng)角和平移速度的同時,IMU以更高的速率控製(zhì)俯(fǔ)仰和橫滾(gǔn)角(jiǎo)。其中用於位置估(gū)計的(de)技術結合了(le)用(yòng)於相機標定的齊次變換法(fǎ)和用於位置估計的平麵位姿法(fǎ),而且基於光(guāng)流(liú)法的導航係統被用來估計四旋翼的平移速度。
雖然利(lì)用標記物容(róng)易實(shí)現(xiàn)位置估計,但(dàn)其(qí)具有局限性,例如LED紅外標記容易受(shòu)到光線(xiàn)影響,在強光照環境下基本不(bú)能應用;標記物隻能借助地麵機器人才能移動,而且在不平坦路麵影響巨大;標記物易與周圍(wéi)環境混淆且易被外界環境損壞等。
視覺裏程計[20-21]和視覺SLAM[22-23]在未知環境中進(jìn)行定位及位姿估計,盡管與控製沒有直接(jiē)關係,但也是基於(yú)視覺(jiào)信表(biǎo)1 PBVS及IBVS的特點Table 1 Advantages and disadvantages of PBVS and IBVS特點優(yōu)點缺點PBVS可(kě)以(yǐ)直觀地(dì)在直角坐標空間定義目(mù)標的運動(dòng),符合現有機器人的(de)工作方式控製精度(dù)很大程度上依賴於位姿估計精度,而位姿估計精度(dù)依賴於攝像機和機器人的標定精度等;此(cǐ)外計算(suàn)量較大IBVS無需三維空間定位、對攝像機和機器人標定不敏(mǐn)感;計算量較小伺服控製器(qì)複雜(zá)且(qiě)缺乏適應性(xìng);需要額外的傳感器獲取深度信息;移位過大會導致不可預知攝像頭運(yùn)動(dòng)圖1 PBVS的基本結構Fig. 1 Basic structureof PBVS圖2 IBVS的(de)基本結構Fig. 2 Basic structure of IBVS69息(xī)的,並將獲取的位姿估計作為(wéi)控製器的(de)輸入來控製其輸(shū)出,以控製並穩定四旋(xuán)翼(yì)飛行(háng),所(suǒ)以歸類於PBVS。Blosh 等[24]第一個提出(chū)將視覺 SLAM 用於四旋翼,然而隻(zhī)是通過 USB 線傳輸圖像實(shí)現地麵站數據處理。這一工作基於 Asc Tec 公司的 Hummingbird 四旋翼平台進行研究(jiū),通過視覺SLAM算法跟蹤攝像(xiàng)頭(tóu)位姿,同時構(gòu)建周圍環境地圖,以位姿估計為基礎(chǔ),設計了 LQG/LTR 控製器來穩(wěn)定四(sì)旋翼,使四旋翼能夠實現起降、懸停和設置點跟蹤。實(shí)驗數據表明,四旋翼(yì)懸停時位置均方值誤差在5 cm以內,而且可以按照緊湊的設置(zhì)點飛行。隨後 Achtelik 等[25]對其進行改進,通(tōng)過采用同樣來自 Asc Tec 公司的機載計算(suàn)機實現了機載數(shù)據處理。為解決視覺(jiào)相對於四旋翼高靈敏性更新頻(pín)率低的問題,將視覺數據與IMU數據進行(háng)融合,同時添加壓力傳感器來估計(jì)視覺位姿測量(liàng)的絕對尺度。這個係統第一個將機器人操作係統(ROS)[26]準則用於機器人控製,並且第一(yī)個將通用計算機用於機載計算機視覺。
Park等[27]提出一種用於小(xiǎo)型四旋翼無人機的(de)基於視覺的SLAM 係統。采用基於 Kanade-Lucas-Tomasi 的(de)定位與跟(gēn)蹤方法進行實時定位,同時采用地麵站處理方法(fǎ)進行(háng)基於特征轉換尺度(dù)不變的地圖構建和更精確的(de)定位。他們(men)也提出一種(zhǒng)基於單目視覺的三維地圖構建方法,這個(gè)方法首先從圖像中提取直線(xiàn)信息並(bìng)且在三維空間(jiān)進行方程式計算,然後通過線信息構建平麵信息。
Faessier等[28]設計(jì)了一種基於視覺的四旋翼無人機,不僅可以按指定路徑自(zì)主飛行,而且能夠獲取實況的稠密的三維地圖。他們運用(yòng)半直接視覺裏程計(SVO)算法估計飛行器運動(dòng),同(tóng)時(shí)對探索(suǒ)到的環境進行地圖擴展。為增強(qiáng)四旋翼的(de)穩定性並提高地圖精度,采用MSF算法將通過SVO算法獲得的視覺信息與從飛控板 Pixhawk 獲得(dé)的 IMU 信息融合,然後通過級聯控製器控製四旋翼穩定(dìng)飛行,級聯控(kòng)製器(qì)包括運行在Odroid上的高級控製器(位置控製器和姿態控製器)和運行(háng)在飛控板Pixhawk上的低級控製器(速度控(kòng)製器)。
Huang 等[29]設計了一種基於單目(mù)視覺的自主導航係(xì)統(tǒng),應用於 Parrot AR.Drone 飛行器。該係統將通過無線攝像頭獲取的(de)視頻流傳輸給地麵站計算機,在(zài)地麵站上運行視覺SLAM算法處理數據進行位姿估計。為(wéi)解決收到(dào)的視頻中運(yùn)動模糊和幀丟失問題,改進了視覺 SLAM 算(suàn)法中的特征跟蹤方法和重新定位模塊,增強了魯棒性。同時為獲得更精準的三維位置與速度,融合了視覺 SLAM 和機載傳感器獲取的數據,並且設計了一種擴(kuò)展卡爾曼濾波器用於傳感(gǎn)器數據融合,矯正了局部漂(piāo)移誤差並且解決了比(bǐ)例模糊問題。
目前 PBVS 方法得到了廣泛的研究,尤其是視覺 SLAM,近(jìn)幾年提(tí)出(chū)了很多 SLAM 算法,主要包括 RGBD-SLAM[30]、LSD-SLAM[31]和 ORB-SLAM[32]等。雖然(rán)視覺 SLAM 算法發展迅速,但現階段僅依靠視覺數據不足(zú)以穩定控製四旋翼,還需要融合其他傳感器數(shù)據(jù),主要是由於視覺 SLAM 在特征不明顯的環境中魯棒性不強,且運算量大,對(duì)所需處理器性能要求高,而目前(qián)機(jī)載(zǎi)處理器的性能一般,運動過快會(huì)導致(zhì)檢(jiǎn)測不到特征點,從而丟失位置。
2.2 基於圖像的視(shì)覺伺服
Bills等[33]采用Parrot AR.Drone四旋翼飛(fēi)行器自帶的朝前和朝下的攝像頭在未知的走廊、樓梯和周圍角落環境下實現視覺導航。采用分(fèn)類(lèi)算法選擇環境類型,然後通(tōng)過視覺算法估計飛行方向。通過實驗證明了這種視覺算法的(de)穩定性,但是(shì)所有的處理(lǐ)都是在地麵站(zhàn)完成的(de),圖像和控製命令通過Wi Fi 傳輸,而且四(sì)周距離和高度通過聲納探測得到,所(suǒ)以該(gāi)視覺(jiào)算法(fǎ)的作用隻是對環境(jìng)的選擇(zé)和對飛行方向(xiàng)的判定。
IBVS在無人機垂直起降問題上得到了廣泛研究(jiū)。Henry等(děng)[34]提出(chū)一種基於視覺伺服和速率陀螺儀測量的穩定反饋定律,用於無人飛行器的垂直起降飛行控(kòng)製。通過視覺對平麵目標進行測量(liàng),給定目標(biāo)與飛行(háng)器參考位姿的距離,隻需(xū)此距(jù)離高於下限,不需要目標任何幾何信息,穩定反饋定律就能成立(lì),並且可(kě)以應用到未知環境中(zhōng)無人飛行器的控製。此外其采用增益調諧策略,使得在大範圍操作下表現良好。針對垂直起降這一問題(tí),Lee等[35]提出一種基於視覺控製的無人機垂直起降算法(fǎ),采用IBVS在二維圖像空間跟蹤平台,並且生成速度指(zhǐ)令(lìng),作為自適應滑膜控製器的輸入。與其他基(jī)於視覺的算(suàn)法相比,重構一個完整的三維表示的目標需要精準的深度(dù)估計,而IBVS由於對深度估計不敏感,允許(xǔ)通過快速的方法來獲得深度(dù)估計,為提(tí)高滑膜控製器的跟蹤速度,要(yào)對地麵效應做自適應補(bǔ)償,最終通過IBVS算法與自適應滑膜控製器的集成實現跟蹤和降落。但(dàn)是該方法不是(shì)機載處理數據,而是通過無線與地麵站計(jì)算機連(lián)接傳輸數據和發送命令,因此延遲(chí)問題(tí)突出。Podhradsky[36]在硬件(jiàn)上(shàng)設計了一種新穎的自動駕駛儀,應用(yòng)於 IBVS,並且在(zài)降落方案中運用了光流算法,由於光流算法直接從二維圖像中提取信息,因此屬於IBVS。通過實(shí)驗(yàn)發現光流算法在高度小於1 m時,計算準確,能夠定位到延伸焦點;但當(dāng)高度(dù)大(dà)於1 m時,光流算法就變得模糊不清並且出現錯誤,主要原因是高度增(zēng)加很難追蹤到(dào)像素的運動。由於分數(shù)階增強在邊緣(yuán)檢測算法中的應用能夠(gòu)提(tí)高目標檢測的精度,因此下一步(bù)研究(jiū)中可以把(bǎ)分數階微積分用到(dào)光流中(zhōng),以降低光流計算的誤差。不同於固定位置降落,Lippiello 等[37]對於垂直(zhí)起降無人機在驅動降落平台上的協同降落(luò)問題,提出(chū)一(yī)種IBVS控製方法。協同(tóng)降落采用無人機的機載攝像頭和IMU數(shù)據,以及采用移動機(jī)械手的裏程計數據,並(bìng)且將係統任務層呈現的冗(rǒng)餘、移動機械手固有的冗餘和無人機(jī)的欠驅動都明確地編址到所提出的控製方法中(zhōng)。當無人機離降落平台較遠時,會出現大(dà)幅度運動,這時機械臂的靈活性(xìng)就得到(dào)了應用,以確保實現安全且精確的銜(xián)接。通過模(mó)擬大量實驗案例,證明了該方法的有(yǒu)效性,但是該(gāi)方法還隻是停(tíng)留在仿真階段,運用到實際中(zhōng)可能(néng)由於(yú)環境(jìng)等影響會出現新的問題。
在跟蹤問題上,IBVS也有涉獵。Singh等[38]提出一種(zhǒng)圖像檢測與跟蹤算法(fǎ)。這(zhè)種算法致力於采用機載攝像頭從實時流(liú)視頻中檢測移動或靜止的(de)物體,采用基於Viola-jones 算法和(hé)斑點(diǎn)分析的IBVS,其中(zhōng)IBVS 用來(lái)定位,Viola-jones 算法及均值(zhí)漂移跟蹤用來檢測物體。這項研究主要是為了探究視覺伺服技術在無人機應用中(zhōng)的潛力(lì)。在實(shí)際應用上,Sa等[39]采用IBVS 和部分自主技術設計了一種基於垂直起降平台的相對杆狀物導航係統。該(gāi)研究的目的(de)是(shì)對垂直建築物進行空中檢測(例如電(diàn)線杆),相對(duì)杆狀物導航提高了係(xì)統的自主性並且(qiě)為部分自主提(tí)供了便利(lì),隻需設置(zhì)高度及偏(piān)航速率,係統可自(zì)調整四(sì)旋翼與杆(gǎn)狀建築物的距離、距(jù)地高度和攝像頭的姿態。IBVS 僅被用(yòng)來跟蹤兩條垂直線(杆狀建築物邊緣),以穩定四旋翼(yì)相對杆(gǎn)狀建築物的(de)姿態。通過基於精準(zhǔn)地麵真實數據的室內外測試評估,證明此係統能夠使四旋翼相對杆狀建築物懸停並環繞航行,誤差在20 cm內,使用者可以輕易執行此(cǐ)任務。同樣在跟蹤線(xiàn)性結構方麵,Araar等(děng)[40]為了達到對線性結構基礎設施的視覺跟蹤目的,提出並比較了兩種基於霍夫參數的控製(zhì)方案,第一種方案是 PPBVS(基於部分位姿的視覺伺服)方案(àn),與 PBVS 有相同的優點,且不需要完整的 3D 位姿估計;第二種方案是基(jī)於最優線性二(èr)次控(kòng)製(LQR)算法的IBVS方案。通過仿(fǎng)真對兩種方案進行比較,結果表明PPBVS方案在快速性方麵表現更加優秀,這主要是由於Hough參數(shù)與(yǔ)三維姿態之間存在線性假設關係,而在(zài)IBVS 方案中,尤其在過渡階段沒有這一關係。此外,PPBVS 控(kòng)製器設計也比IBVS簡單,因為它隻(zhī)需要利用在笛卡(kǎ)兒三維空(kōng)間(jiān)下設計的(de)位置控製(zhì)器。不僅如此,而且PPBVS方案中高度和橫向位(wèi)置控製器(qì)的設計獨立於彼此,這使得其相對於IBVS方案更容易調諧(xié)。與 PBVS 算法相比,
IBVS 算(suàn)法計算簡單且高度估(gū)計不易受影響(xiǎng),但需要采用距離傳感器,控製器設計難度也較大。隨(suí)著算法的不斷改進(jìn)和處理器計算性能的不斷提高,PBVS算法(fǎ)相對於(yú)IBVS 算法在位姿估計和控製器設計方(fāng)麵表現出了優勢,受到研究人員(yuán)的青睞(lài)。
3.發展趨勢
隨著(zhe)電(diàn)子科學(xué)技(jì)術和計算機(jī)視覺技術的(de)快速發展,電(diàn)子元器件、處理器不斷(duàn)小型化、高性能化(huà),視覺算法研究不斷取得突破,視覺伺服(fú)在小(xiǎo)型多旋翼無人(rén)機自主飛(fēi)行控製中的研(yán)究已成為一個前沿高端的熱門領域,雖然目前已取得一些進展,但是(shì)對於小型多旋翼無人機自主飛行控製的(de)應用還遠遠不夠,隻是(shì)簡(jiǎn)單實現了特征明顯環境下的自主起降、懸停和按設置點飛行(háng),未(wèi)來的發展必將圍繞著增強視覺算法的實時性、精確性和魯棒性展開,並且實現自主飛(fēi)行的智能化,例如室內室外模式選擇、室內(nèi)協同控製等。
1)視覺(jiào)算(suàn)法的魯棒(bàng)性。目前(qián)視覺算法隻能夠在特征較為明顯的(de)環境(jìng)下(xià)實現實時定位,滿足自主飛行。若攝像頭運(yùn)動過快且特(tè)征不是特別明顯,則會發生特征點跟蹤失敗從(cóng)而丟失位置的現象。雖然 MSF 方法增(zēng)強了自主飛行控製的魯棒性,但是沒有從根本上解(jiě)決問題,所以隻有(yǒu)從根(gēn)本上增(zēng)強視覺算(suàn)法的魯棒性,才能夠(gòu)實(shí)現在任(rèn)何環境下的自主飛行。
2)室內(nèi)室外模式轉換。目前對於無人機自主(zhǔ)飛行控製的研究不是完全針對室內環境的就是完全針對室外環境下的,而從室外自主飛行轉換到室內自主飛行(háng)的研究鮮少。室外(wài)可采用 GPS 定位,室內采用視覺定(dìng)位,當 GPS 信號低於一定值時轉換(huàn)為視覺定位,高於一定值時再轉換為(wéi) GPS 定位,此方向的(de)研究(jiū)有利於對一些室內等 GPS 信號(hào)失效(xiào)的環境進行遠程(chéng)探索、偵察和(hé)搜救等(děng)。
3)室內(nèi)協同控製。目前對於地麵機器人協同控(kòng)製和基於外部(bù)視覺係(xì)統的多無人機協同控製研究較多,而(ér)基於機載視覺(jiào)的多無人機(jī)室內協同控製研究鮮少。基於機載(zǎi)視覺的多(duō)無人機室內協(xié)同控(kòng)製不需要采用外部輔助係(xì)統,不僅節省資(zī)源,而且可以在未知環境下應用,相對於地麵機器人,無人機具有更強的機動性(xìng)和靈活性,且有更好的視角。多(duō)無人機室內協同控製可同時控製(zhì)多架無人機對(duì)複(fù)雜環境進行(háng)分塊搜(sōu)索(suǒ)、偵察和構(gòu)圖等,這一(yī)功能不僅大大提高任務(wù)效率,而且增強其可靠性。
4.結論
在小型多旋翼(yì)無人機自主飛(fēi)行控製中,視覺(jiào)伺(sì)服已成為一個前沿高端的熱(rè)門研究領域,在未來的各個領域中,無論是軍事(shì)領域還是民用(yòng)領域(yù),視覺伺服必將發揮重要作用,推動各個領域的發展。雖然(rán)現在對視覺伺服在小型多旋翼無人機自主(zhǔ)飛行控(kòng)製中的研究還不(bú)夠成熟,依然存在機載處理數據運算能力有限、視覺算法不夠成熟以及應用環境有限等問(wèn)題,但是已(yǐ)經有越來越多的研究者投入到了(le)這個領域,這些(xiē)問(wèn)題將會迎刃而解,使視覺伺服應用到小型多旋翼(yì)無人機自主飛行控製中的(de)各個領(lǐng)域。
投稿箱:
如果您(nín)有機床行業、企(qǐ)業相關新聞稿件發表,或進行資(zī)訊(xùn)合作,歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
如果您(nín)有機床行業、企(qǐ)業相關新聞稿件發表,或進行資(zī)訊(xùn)合作,歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
州(zhōu)金(jīn)馬")
業界視點
| 更多

行業數據
| 更多(duō)
- 2024年11月(yuè) 金屬切削機床產量數據
- 2024年11月 分地區金屬(shǔ)切(qiē)削機床(chuáng)產(chǎn)量數據
- 2024年11月 軸承出口(kǒu)情況(kuàng)
- 2024年11月 基本型乘用車(轎車)產量(liàng)數據
- 2024年11月 新(xīn)能源汽車產量數據
- 2024年11月 新(xīn)能源汽車銷量情況(kuàng)
- 2024年10月 新能源汽車產量數據
- 2024年(nián)10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數(shù)據
- 2024年10月 金屬切削(xuē)機床產量數據
- 2024年9月 新能源汽車銷量(liàng)情(qíng)況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據
博文選萃
| 更多
- 機械加工過(guò)程圖示(shì)
- 判斷一(yī)台(tái)加工中心精度的(de)幾種辦法
- 中(zhōng)走絲線切割機床的發展趨勢
- 國產數控(kòng)係統和(hé)數控機床何去何從?
- 中國的技術工人都(dōu)去哪裏(lǐ)了?
- 機械老板做(zuò)了十(shí)多年,為何還是小作坊?
- 機械行(háng)業最新自殺性營銷,害人害己!不倒閉才
- 製造業大(dà)逃亡
- 智能時代,少談點智(zhì)造,多談點製造
- 現實麵前,國人沉默。製造業的騰飛,要從機床
- 一文搞懂數控車床加工刀具補償功能
- 車床鑽孔攻螺紋加工方法及工裝設計
- 傳統(tǒng)鑽削與螺(luó)旋銑(xǐ)孔加工工(gōng)藝的區別