


錯齒內排屑刀具深孔加工(gōng)中的刀具振動特性對孔圓度形貌的作用(yòng)機製
2018-4-23 來(lái)源:西安理工大學 機械與精(jīng)密儀器工程學院 作者:孔令飛,牛晗,侯曉麗,林宏斌,王傑
摘要: 依據錯齒內排屑刀具(jù)深孔加(jiā)工的實(shí)際特點,構建了受刀具橫向振動(dòng)特性影響(xiǎng)的加工孔圓(yuán)度形貌模(mó)型(xíng)。運用動力學半解析法,在保證刀具係統動態分析精度的前提(tí)下,將複雜深孔刀具(jù)係統離散為多段具有局部(bù)特征的梁單元,其中相鄰單元之間滿足模態形(xíng)函數傳遞矩陣的連續條件。結合(hé) Newton-Raphson 迭代法,給出(chū)了深孔圓度形貌形成軌(guǐ)跡的數學描述,以及深孔刀具(jù)動態特性與加工孔圓度形貌之間的關聯關(guān)係。通過數值算例驗證了所提出方法(fǎ)的可行性,同時為實現(xiàn)深孔切削過程加工(gōng)孔圓度誤(wù)差的預測與(yǔ)控製奠定了基礎。
關(guān)鍵詞: 機械製造工藝與設備; 深孔鑽削; 刀具振動; 圓度形貌; 半解析法
0、引(yǐn)言
精密高效的錯(cuò)齒內排屑刀具( BTA) 深孔鑽(zuàn)削(xuē)技術是當今兵器工業、新能源裝(zhuāng)備製造和高新(xīn)技術產業對深孔零件加工提出的迫(pò)切需要。然(rán)而,由於深孔鑽削機理的複雜性,實際加工中刀具係統需要承受切削力波動及刀具(jù)回(huí)轉(zhuǎn)慣性等的影(yǐng)響,而(ér)這些載荷又隨著加工參數的變化而變化,致使刀具所表現出的(de)動態行為極其複雜,進而(ér)對加工孔品質產生極大影響。那(nà)麽,如何構建更(gèng)加精確的深孔(kǒng)刀(dāo)具係統動態模型(xíng),探明加(jiā)工參數與加工孔精度的映射關係,實現高效、準確地預測與控製加工孔品質,就成為深孔鑽削研究的熱點和關鍵問題。
Mehrabadi 等構建了(le)考慮鑽削過程(chéng)阻(zǔ)尼和質量偏心影響的刀具(jù)係統動力學模型,討論了刀具動態運行軌(guǐ)跡及其相應(yīng)的孔圓度形貌特征,並結合(hé)實驗證實了該模型的準確性。Bayly 等依據鑽削加工過程的實際特點,研究了顫振對鑽削刀刃切(qiē)削力(lì)和 碰 摩 力 的 影 響,分析了葉瓣孔的成形(xíng)機理。在此(cǐ)基礎上,Deng 等運用 Euler-Ber-noulli 梁單元模型,並結合深孔切削力的傅(fù)裏葉函數形式表達式,給出了深孔加工圓度誤(wù)差計算模型,進而對波(bō)紋型與葉瓣(bàn)型深孔的形成機理進行了研究。但是,由於刀具係統結構的(de)複(fù)雜性,這些將切削力簡(jiǎn)化為一階徑向波動分量形式,或是將刀杆簡化為簡支(zhī)梁模型,以期得到加(jiā)工孔圓度形貌的數值解或解析解,就不可避免地丟失刀具係統的一些動力學特性。在實際的深孔加工刀具係統(tǒng)中,刀具經常是(shì)由多個部件組成的連續體,且包含有多段刀杆及特殊構造的刀頭,因而難以(yǐ)用簡單模(mó)型來描述,必須構建更加精確的深孔加工刀具係統模型。
針(zhēn)對(duì)上述(shù)問題,本文將複雜深孔(kǒng)刀具(jù)係統離散為多段具有局部結構特征的梁單元(yuán),而相鄰單(dān)元之間(jiān)滿足模態形函數傳遞矩陣的連續(xù)條件。然後,利用 Newton-Raphson 迭代法,並結合 BTA 深孔鑽削力的傅裏葉多階諧波形式,給出了深孔圓度形貌形成軌跡的(de)解析形式。據此,研究了深孔刀(dāo)具動態特性與加(jiā)工孔圓度形貌之間(jiān)的關聯關係,以及在深孔低速(sù)切削(xuē)過程中易出現葉瓣孔型的成因及其(qí)機理。數值算例(lì)驗證了本文所提出方(fāng)法的可行性,該方法將(jiāng)為實現深孔切(qiē)削過程加工孔誤差的預測與(yǔ)控製奠定基礎.
1、BTA 深孔鑽削係統(tǒng)的動態方程
1. 1 BTA 深孔鑽削係統的模型
深孔鑽削加工是將特殊構型的切(qiē)削刀具裝在圓形空心鑽杆上(shàng),使(shǐ)得工件相對(duì)於刀具(jù)作高速旋轉運動( 或刀具相對於工件作高速(sù)旋轉運動) 。通過(guò)授油裝置將高壓切削液沿著鑽杆與孔壁之間的縫隙噴入切削區域,利用切削液自身壓(yā)力實(shí)現刀具切削部分排屑(xiè)、冷卻和潤(rùn)滑。圖1為鑽杆係統示意(yì)圖。
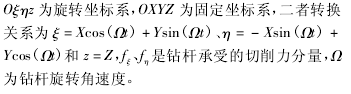
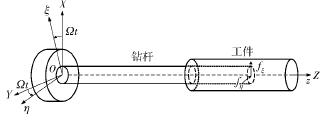
圖1 深孔鑽削刀具(jù)係統示意圖
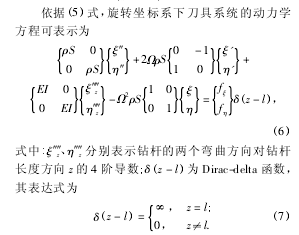
采用 Lagrangian 變分原理,如圖 1 所示的(de)深孔刀具係統應滿足:
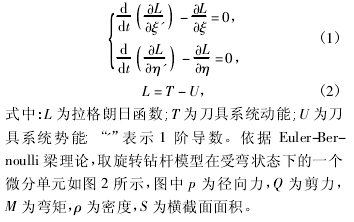
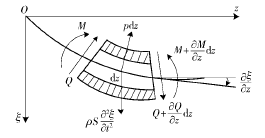
圖2 BTA 鑽杆微分單元
由圖2可以得到 BTA 旋轉鑽杆係統的動能表達(dá)式為

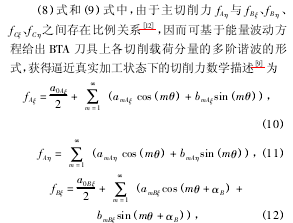
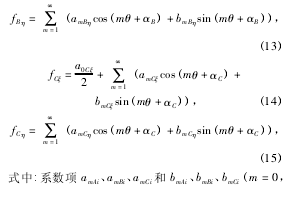
1. 2 BTA 深孔加工刀具的動態切削力求解( 6) 式的刀具動(dòng)態軌跡(jì)時,迭代過程需要(yào)主切削刃上的切削力、導(dǎo)向塊上的正壓力及摩擦力矢量的多次求和,而矢量(liàng)力疊加的協調精度不僅影響到求(qiú)解刀具動態響應是否收斂(liǎn),而且對被加工孔圓度誤差預測(cè)及(jí)其演變規(guī)律的定量分析具有(yǒu)重要影(yǐng)響。為了方便計算各(gè)切削分力的矢量和,可將旋轉(zhuǎn)坐標係下所描述的刀(dāo)具受力係統轉化(huà)到直角坐標係,如圖 3 所示。圖 3 中: A 表示 BTA 深孔加工刀頭的主切削刃,B、C 表示(shì)其兩個導向塊(kuài); fAξ、fBξ和 fCξ分別表示(shì)切削刃 A、導向條 B 及導向條(tiáo)C在動坐標係ξ方向上的受力,而 fAη、fBη和 fCη分別表示切削刃 A導向條 B 及導向條 C 在(zài)動坐標係 η 方向上的受力; θ為刀具旋轉角度,θ = Ωt; αB和 αC分別為切削刃與導向條(tiáo) B 和 C 的夾角。因此,實際深孔鑽(zuàn)削中,t時刻加工刀具在 X、Y 方向上所承受的矢(shǐ)量疊(dié)加(jiā)力可表示(shì)為
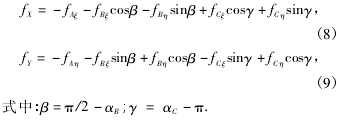

圖3 BTA 深孔加工切削力分布
由圖2可以得到 BTA 旋轉鑽杆係統(tǒng)的動能表達式為
2 、深孔圓度形貌的形成軌跡
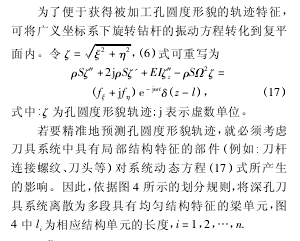
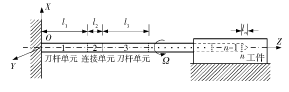
圖4 深孔(kǒng)鑽削刀具係統模型(xíng)
圖4中(zhōng),經離散化處理(lǐ)後的深(shēn)孔刀(dāo)具係統可分為(wéi) n 個結構單元,其中第 i 段梁的模態函數為
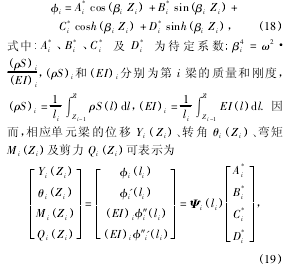
采用與( 20) 式相似的推(tuī)導過程,若取 i = 1,2,…,n 時,則(zé)自由(yóu)邊界(jiè)條(tiáo)件下 BTA 深孔刀具係統模態形函數的傳遞矩陣可寫為(21)式的形式。Deng 等和 Hussien 等的研究結果表明深孔(kǒng)刀具係統的邊界(jiè)條件可假設為簡支梁,且具有足夠的精度。因此,根據(22) 式的刀具單元模態傳遞形式,並綜合(hé)考慮邊界(jiè)條(tiáo)件,便可得刀具係統的連續傳遞函數(22) 式。


就(27) 式的本質而言,被加工(gōng)孔的動態形貌軌跡 ζ( t) 是深孔刀具振動(dòng)過程中 n 階振動模態函(hán)數的(de)疊加。利用( 27) 式,並結合 Shunmugam 提(tí)出的最小二乘圓法(fǎ),即可很容易地獲得被加工孔的圓度誤差。
3 、方法(fǎ)驗證
為了驗證方法的可行性,運用上述理論和(hé)算(suàn)法編(biān)製程(chéng)序(xù),將計算(suàn)結果(guǒ)與文獻的實驗結果進行對比。相關計 算參數如下: 鑽杆材料密度為7860 kg / m3,彈性模量(liàng)為 2.06×1011Pa; 刀具直(zhí)徑分別選用 18. 91 mm 和 26. 40 mm 兩種,其(qí)中刀具直徑為 18. 91 mm 時,鑽杆的內徑與外徑分別為11. 5 mm和 17 mm,而當刀(dāo)具直徑為 26. 40 mm 時,鑽杆的內徑與外徑分別為 14 mm 和 22 mm.
表(biǎo)1 為(wéi)在不(bú)同切削轉速、進給量及加工深度條件下,計(jì)算得到的被加工孔圓度誤差數值。由表 1可以看出,當選(xuǎn)定加工深度時,若改變鑽削進給(gěi)量、切削轉速或鑽杆直徑參數,被加工孔圓度誤差的預測結果與實驗結果的變化趨勢是相同的,即(jí)隨著鑽削進給(gěi)量的增加、切削(xuē)轉速的(de)增大及鑽杆直徑的(de)減少,被加工孔的圓度誤差均在不同程度上增大。例如(rú)當選定加(jiā)工深度為 150 mm 時,鑽削(xuē)進給量從0.05 mm / r 增加到 0. 1 mm / r,圓度誤差的預測結果從 2. 9 μm 增加到 4. 9 μm,而實驗結果則從 2. 7 μm增加到 4. 8 μm; 若選定(dìng)加工深度為 200 mm 時,切削轉速從 390 r/min 增加855 r/min,圓度誤差的預測結果與實驗結(jié)果分別從 2. 8 μm 增加到 4. 9 μm 和從 2. 6 μm 增加到 5. 2 μm. 此外,盡(jìn)管孔圓度誤差的預(yù)測(cè)結(jié)果與(yǔ)實驗結果存在一些差異(yì),但二者之間的誤差幾乎都(dōu)在 10% 以內,這(zhè)表明本文所提出的方法適用於預測被加工孔的圓度誤差及其變化趨勢(shì),且具有較高的(de)精度。然而,就預測結果與(yǔ)實驗(yàn)結果之間的差異而言,主要是由於本文采用的切削力模(mó)型尚存(cún)在不足之(zhī)處,例如導向塊與孔壁表麵之間的摩擦效應、材料本身的(de)性能等因(yīn)素未被考慮(lǜ)。
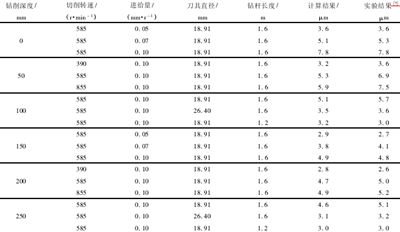
表1 圓度誤差的(de)理論計算與實(shí)驗結果對比
4 、應用算例與分析
本節將運用前文所述的算(suàn)法編製程序,探究不同切削轉速條件下,刀具(jù)中心動態軌跡與孔(kǒng)表麵圓度形貌之間的關聯聯係,進而為實際(jì)加工過程中精準預測或控(kòng)製被加工孔的圓度誤差奠定基礎。圖5~圖(tú) 7 分別給出(chū)了(le)當進(jìn)給量為 0. 1 mm/r、鑽杆長度為 1. 6 m 及刀具直徑(jìng)為 18. 91 mm 時,選取390 r / min、560 r / min 和 830 r / min 3 種不同切削轉速進行加工,獲得的刀具中心動態軌跡。從圖5~圖7中可以看出,隨著切削轉速的增大,刀具中(zhōng)心(xīn)動(dòng)態軌跡的振(zhèn)動範圍不斷增大,但振動特征卻呈現出明顯差異。例如當刀具轉速為 390 r/min 時,刀具中心的動態(tài)軌跡呈(chéng)現出明顯的 4 波瓣軌跡,而切削轉速為560 r / min 和 830 r / min 時,上述現象(xiàng)卻並不明顯(xiǎn)。為了進一步研究(jiū)孔圓度形貌的形(xíng)成機(jī)製,可取上述相同的加工參數,繪製出孔圓度形貌軌跡,如圖8所(suǒ)示。從圖 8 中可以看出,對於 3 種不同的切削轉速而言,刀具每切削一個周期所形成的(de)圓度(dù)形(xíng)貌軌跡與相鄰(lín)兩周之間均存在著一個(gè)相位差εp,進而造成了相鄰切削周期內所形成(chéng)的孔型存在角度差異。若相位差εp越小,則(zé)相鄰(lín)切削(xuē)周期的孔型偏差也就(jiù)越小(xiǎo)。結合 Bayly 等和 Tlusty的(de)研究可知,孔圓度(dù)形(xíng)貌的偏差與刀具係統固有特性有著直接聯係。基於此,利用本文所述的數(shù)值計算(suàn)方法,獲得深孔刀具係統的第 1 階固有頻率為 25. 2 Hz,將其轉化成相應的轉速單位為 1 510. 8 r/min. 若選取(qǔ)切削轉速為 390 r/min 時,該值恰好接近於固有頻率的四分之一( 即 377. 7 r/min) ,因而被加工孔(kǒng)圓度形貌呈現出明顯的 4 瓣特征,如圖 8 ( a) 所示。圖9 ~圖 12給出了當切削(xuē)轉速分(fèn)別為深孔鑽(zuàn)杆係統(tǒng)第 1 階固有頻(pín)率的 1 /2、1 /3、1 /4 和 1 /5 時,計算(suàn)獲得的刀具中心動態軌跡,相應的波瓣數為 2 瓣、3 瓣、4 瓣(bàn)、5 瓣。通過上述數值算例可以看(kàn)出,雖然實際(jì)鑽削中引發孔圓度形貌變化的原因不同,但其形(xíng)成的(de)過程和(hé)出現(xiàn)的規律是相同的,即孔圓度(dù)形貌與刀具係統的低階固有頻率及激(jī)勵頻率有著最為(wéi)直接的聯係。
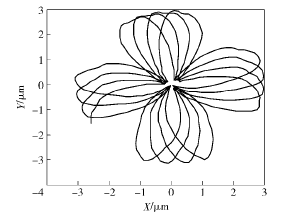
圖5 當 Ω = 390 r/min 時刀具中心的動態軌跡
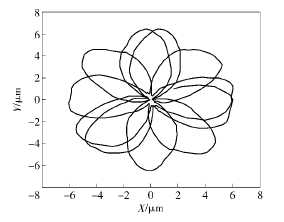
圖6 當 Ω = 560 r/min 時刀具中心的動態軌跡
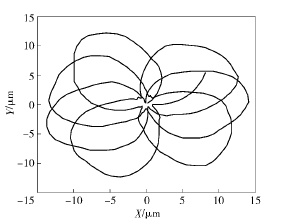
圖7 當 Ω = 830 r/min 時刀具中心的動態軌跡(jì)
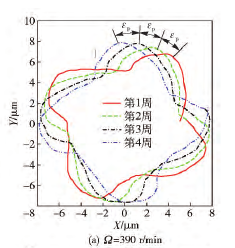
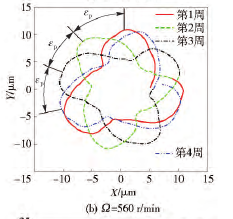
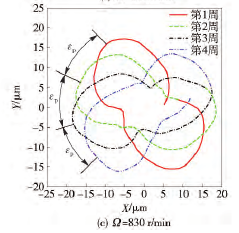
圖8 不同轉速時(shí)孔表麵圓度的二(èr)維形貌軌跡
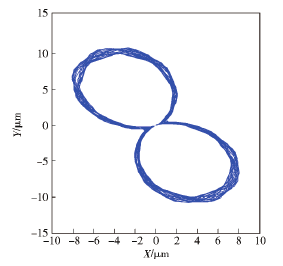
圖9 當 Ω = 755. 4 r/min 時刀具中心的動態軌跡
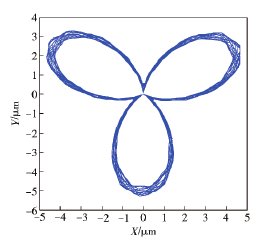
圖10 當 Ω = 503. 6 r/min 時刀具中心的動態軌跡
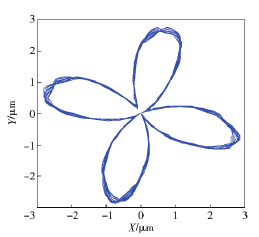
圖11 當 Ω = 377. 7 r/min 時刀具中心的動態軌跡(jì)
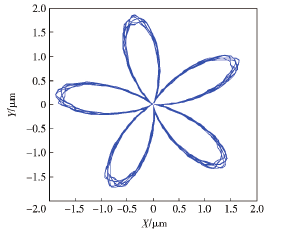
圖12 當 Ω = 302. 16 r/min 時刀具中心的動(dòng)態軌跡
5 、結論
考慮到實(shí)際深孔(kǒng)加(jiā)工刀具係統結構的複雜性,將刀具(jù)係統離散(sàn)為多(duō)段具有局部(bù)結構特征的梁單元,其中相鄰單元之間滿足模態(tài)形函數傳遞矩陣的連續條件,進而構(gòu)建了深孔圓度形貌形成軌(guǐ)跡的解(jiě)析表達式。運用該數(shù)值計算方法,研究了刀具動態特性與加工孔圓度形貌之間的關聯關係。由數值計算結果可以看出,雖然深孔鑽削過程(chéng)中引發孔(kǒng)圓度誤(wù)差變化(huà)的原因不(bú)同,但其形(xíng)成的過程和出現的規律是相同的,即孔圓度誤差形貌與刀(dāo)具係(xì)統(tǒng)的固有頻率(lǜ)及(jí)激勵頻率有著最為直接的聯係。此外,算例結果也驗(yàn)證了本文所提出的方法(fǎ)適用於探究被加工深孔圓度誤差(chà)的變化規律,這些將為實現深孔切削過程加(jiā)工(gōng)孔圓度誤差的預(yù)測與控製奠定基礎,且具有(yǒu)足夠的精(jīng)度。
投稿箱:
如果您有機床(chuáng)行業、企業相關(guān)新聞稿件發表,或進(jìn)行資訊合作,歡迎聯係(xì)本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
如果您有機床(chuáng)行業、企業相關(guān)新聞稿件發表,或進(jìn)行資訊合作,歡迎聯係(xì)本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
更多相關信息(xī)

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據(jù)
- 2024年11月 分地(dì)區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年(nián)11月 新(xīn)能源汽車產量數(shù)據
- 2024年11月 新能源汽車銷(xiāo)量情況
- 2024年10月 新能源汽車產(chǎn)量(liàng)數據
- 2024年10月 軸承出口情況
- 2024年10月 分地(dì)區金屬切削機床產量數據(jù)
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況(kuàng)
- 2024年8月(yuè) 新能源汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據