


摘 要(yào):詳細介紹(shào)施耐德Premium係列PLC與喬治CVI擰緊扳手控製器進行MODBUS通訊,包括(kuò)通訊硬件配置、參(cān)數配(pèi)置,CVI MODBUS通訊協議,擰緊扳手控(kòng)製(zhì)器數據(jù)讀寫(xiě),以及MODBUS通訊診斷。
關鍵字:MODBUS 協議 波特率 PCMCIA
1.引言
在汽車行業的各種裝(zhuāng)配線(xiàn)中,擰緊機是(shì)裝配線上一個最常用(yòng)的機床和工具,而(ér)擰緊扳(bān)手控製器往(wǎng)往通過PLC通訊來進行控製(zhì),通訊雖然具有(yǒu)技術性強、接(jiē)線少、線路簡潔等優點,但在查找故障時,搞不清通訊的原(yuán)理、協議和數據讀寫方法,則很難尋找、分析和判斷(duàn)故(gù)障,甚至無從下手,常常在裝配線上控製器(qì)通(tōng)訊出現(xiàn)故障時,耽誤很長(zhǎng)時間,嚴重影響生產,因此(cǐ)研(yán)究PLC與CVI擰緊(jǐn)控製器進行MODBUS通訊具有(yǒu)非常重要的現實指導意義。
2. 配(pèi)置
2.1 通訊硬件(jiàn)配置
PLC通過(guò)CPU上的TSX SCP 114 PCMCIA通訊(xùn)卡經由(yóu)線路分支器TSX SCA50連接(jiē)到擰緊扳手控製器的右側25針RSB接口。
硬件:
PCMCIA卡:TSX SCP 114
通訊連接電纜:TSX SCP CM 4030 或TSX SCY CM6030(接TSXSCY21601通訊模塊)
線路分支器:TSX SCA50
RSB接口,RS485連接,針腳定義如下(xià):
7 0V
11 RT+(DA)
19 RT-(DB)
2.2 PLC配置
本項(xiàng)目PLC采用的是施耐德Premium,軟件用PL7 PRO,在(zài)“Hardware configuration”中,雙擊CPU模塊的“comm”通訊接口或TSX 20601模塊,在通道框內選擇“CHANNEL1”,選擇所需(xū)通(tōng)訊的通訊卡類型“TSX SCP114 RS485 MP PCMCIA CARD”;
在類(lèi)型框(kuàng)選擇“MASTER”,並選擇通訊重試的次數和應答(dá)延時;再配置所需其它通訊(xùn)參數,如選擇波特率19200、8個數據位、1個停止位、偶校驗。如圖(tú)1:

圖1
2.3 擰緊扳手控製器配置
擰緊扳手控製器采用CVIPC2000軟件進行配置。
①串行連接(jiē)參(cān)數配置:
點擊Parameters Controller Serial ports 進入串行連接參數配置窗口,點擊RSB Port菜單,對外設、串口類型、波特率、數據位、停止位、奇偶(ǒu)校驗等(děng)進行配(pèi)置,如圖2。
Associated peripheral: PLC
Serial port type: RS485i
Baudrate: 9600
Number of data bitss: 8
Number of stop bits: 1
Parity: none/even/odd
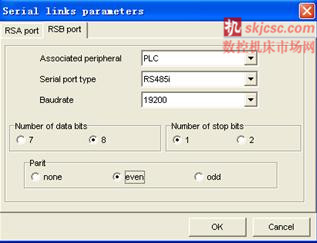
圖2
②PLC MODBUS連接配置:
主要配置通訊(xùn)方式、主(zhǔ)/從選擇、地址設置等,配置路徑及(jí)配置(zhì)如下。
點(diǎn)擊 Parameters Controller Peripherals進入外設配置窗口,點擊PLC菜(cài)單:
在PLC框中選擇 JBUS/MODBUS、slave、slave number: 10 (可自行(háng)定義(yì)),associated port在RSB port串行連接配置後此處會顯示為RSB port;
在(zài)fieldbus board框中配置: No、slave、network addess: 3、選Cylic、memory transfer:勾選上
設置如圖3。
圖3
3.CVI MODBUS通訊協議
3.1 命令/狀態(二進製輸入/輸出和網絡)
以下(xià)表格為所要(yào)讀(dú)寫的CVI擰緊控製器的輸入輸出狀態和(hé)相關命令。
二進製輸入:
一個站包含14個二進製輸入(rù),這些數據是(shì)物理輸入的狀態(tài),它們為隻讀方式(shì),如表1。
表1:
可根據需要對輸入狀態進行判斷和診斷。
二進製輸出:
一(yī)個站包含15個二進(jìn)製輸出,這些數據是物理輸(shū)出的狀態,它們為隻讀方式,如表2。
表2:
當(dāng)合格循環的次數等於設置合(hé)格循環的次數(shù)時,“循環OK數(shù)量”輸出為1,即(jí)總(zǒng)擰緊OK。
網絡(luò)輸入:
一個站(zhàn)包含14個二進製輸入,其中有6個通過網絡可用,即SCY(循環啟動)、Dir(方向)、RPRq(報告請求)、ES(急停(tíng))、reset(複位)、Fail.ACK.(故障確認) ,如(rú)表3。
表3:
3.2 結果
擰(nǐng)緊結果包括一般報告、趨勢、扭矩、角度、扭矩率等,如表4。
表4:

3.3 選項
通過選項(xiàng)可輸出(chū)各種所需擰緊結果數據格(gé)式。
擰緊扳手控製器默認結果數據格式:
結果值掩碼選擇,讀(dú)寫地址為0x7829,缺省(shěng)值W10=7(扭(niǔ)矩+角度+扭矩率)
結果格式,讀寫地址為0x782A,缺省值W11=0(ASCII字符格式)
結果存儲映像類型,讀寫地(dì)址為0x782B,缺省值W12=1 (終值(zhí)+擰緊趨勢(shì)值)
輸(shū)出擰緊結果數據格式如表5:

表5
4.擰緊扳手控製器數據(jù)讀取
要讀取擰緊控製器的數據,首先要掌握PLC的讀取命令及其格式,PLC讀取數據命令為:READ_VAR(地址,目標類型,目標首址, 目標數量,數據接收區, 返回碼)
地址:地址的(de)格式為ADR( { 網絡 . 工作站 } 機架號 . 模塊號 . 通道號 . 目標地址即從站地址 ),但禁止使用以下地址:{ 網絡 . 工作站 } APP,{ 網絡 . 工作站 } APP.num和廣播(bō)地址。
目標類型:在MODBUS通訊方式,目標類型(xíng)隻能為%M:內部(bù)位、%MW:內部字。
目標首址:要讀(dú)目標的首地址、即第一個地址。
目標數量(liàng):要讀目標的指定長度,即個數(shù)。
數據接收區:要讀目標的值放到該區域,這些數據是連續存放的。
返回碼:讀操作的狀態及錯誤碼。
16#00: 讀操作正確
16#01: 操作錯誤
16#02: 應答不正確
16#03: 應答長度不符合
下麵以扳手控製器1號(hào)扳(bān)手為例進行數據讀取,扳手控製器接在PLC CPU模塊的TSX SCP114上,故通訊(xùn)地址為0號模塊(kuài)(槽),CPU中(zhōng)配置(zhì)通訊的通(tōng)道號為1,CVI扳手的地(dì)址(zhǐ)設為10。
4.1 擰緊(jǐn)扳(bān)手控製器輸出狀態讀取
擰緊扳手控製器的輸出(chū)狀態有15個位,這裏主要是讀(dú)取扳手控製器準備好、擰緊OK、擰緊NOK等信號,讀取命令如表6。
表6
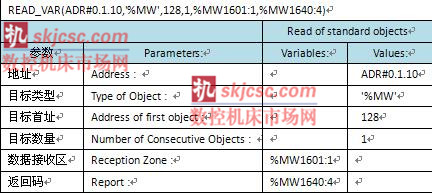
該指令讀(dú)0號模塊1號通(tōng)道10號地址,數據(即控製器的輸出狀態)地址為128(80H)的1個字到%MW1601中,讀操作狀態(tài)返(fǎn)回(huí)到%MW1640、%MW1641、%MW1642、%MW1643中。
4.2 擰緊扳手控製器擰緊結果讀取
擰緊扳手控製器的擰緊結果,包括一般報告(gào)、趨(qū)勢(shì)、扭矩、角度、扭矩率,本(běn)項目主要是讀兩個擰緊扳手的扭矩值和角度值。
下(xià)麵讀(dú)取1號扳手擰緊扭矩結果,扭矩讀出命令為READ_VAR(ADR#0.1.10,'%MW',6145,3,%MW6000:3,%MW6500:4),該指(zhǐ)令讀0號模塊1號通(tōng)道10號地址,數據(jù)(即扭矩)地址為6145(1801H)的3個字到%MW6000、%MW6001、%MW6002中,讀操(cāo)作狀態返回到(dào)%MW6500、%MW6501、%MW6502、%MW6503中。返回狀態信息主要查看第一個字(zì),其含義見上麵說明。兩個(gè)擰緊(jǐn)扳手的扭矩和(hé)角度讀取方法相同,改變讀取地址即可,數據格式默認為(wéi)ASCII碼,表7為讀出的結果(guǒ)。
表7:
在PLC中(zhōng)監控變量的值時,要注意變量值的格式,表中十進製8224=2020H=’ ‘。
5. 擰緊扳手控製(zhì)器數據寫入
PLC寫入命令為:WRITE_VAR(地(dì)址,目標類(lèi)型,目標首址, 目標(biāo)數(shù)量, 要寫的數據, 返(fǎn)回碼)
地址:地址的格式為(wéi)ADR( { 網(wǎng)絡 . 工作站 } 機(jī)架號 . 模塊號 . 通道號 . 目標地址即從(cóng)站地址 ),但禁止使用以(yǐ)下地址:{ 網絡 . 工作站 } APP,{ 網絡 . 工(gōng)作站 } APP.num和廣播地址。
目標類型:在MODBUS通訊方式,目標類型隻(zhī)能為%M:內部位、%MW:內部字。
目標首址:要寫目標的首地址、即控製器內部的(de)數據存放地址。
目標數量:要寫目(mù)標的指定長度,即個數。
要寫的數據:要寫到目標的(de)值放在該區域,這些數據是連續存放的。
返回(huí)碼:寫操作的狀態及(jí)錯(cuò)誤碼。
16#00: 寫操作正確
16#01: 操作錯誤
16#02: 應答不正確
擰緊扳(bān)手控製器數據的寫入,主要是(shì)寫控製命(mìng)令到擰緊扳手控製(zhì)器,如選擇(zé)擰緊程(chéng)序、反(fǎn)轉擰鬆、擰緊扳手控製器複位、清零,它(tā)們的寫入操作一樣,僅要寫的值不一樣,其(qí)值根據需要確定,如要選擇5號擰緊程序,則值為37(25H),反轉(zhuǎn)擰(nǐng)鬆則為96(60H),複位則為512(200H),清零則為(wéi)0,寫入命令如表8。
表8:
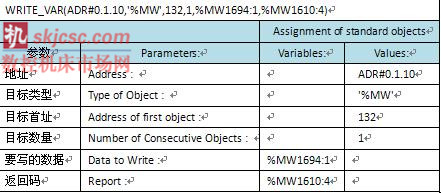
該指令(lìng)寫0號模塊1號通(tōng)道10號地址,把%MW1694一個字的值寫(xiě)到地址為132(84H)的控製器中,寫操作狀態返回到%MW1610、%MW1611、%MW1612、%MW1613中。改變%MW1694的值就可把各種命(mìng)令寫入扳手(shǒu)控製器中。
6. 通訊診斷
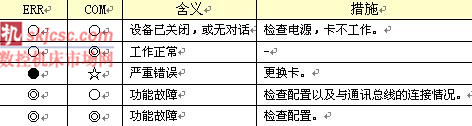
在通訊時,通訊(xùn)診斷非常重(chóng)要,我們可(kě)以通過(guò)SCP 114 PCMCIA通訊卡進行診斷。TSX SCP 114 PCMCIA卡上有兩個LED指示燈,一個是紅色故障燈“ERR”,亮時表示出錯,正常情況(kuàng)下熄滅。另一個為黃(huáng)色通訊(xùn)燈(dēng)“COM”,表示線路的通訊狀況,有(yǒu)通(tōng)訊(xùn)即(jí)讀寫數據時閃爍,讀寫完後(hòu)熄滅;無通(tōng)訊即不(bú)讀寫數據時熄滅。如果(guǒ)無通訊時(shí),黃燈不停地閃爍,屬於通訊不正常。兩個LED燈的狀態診斷(duàn)如表9。診斷同時還可以查看通訊讀(dú)寫時的返回碼,並根(gēn)據返回碼進一步確定通訊故障。尤其要特別注意的是通訊線路的屏蔽接地非常重(chóng)要。
表9:
7. 結(jié)語
CVI控(kòng)製(zhì)器使用廣泛,其MODBUS通訊應用技術(shù)性強,許多自動化人員對其不(bú)了解,碰(pèng)到通訊問題非常棘手,通過上述通訊應用的詳細介紹,必將給廣大CVI控製器設計和維修人員提供(gòng)非常實用(yòng)的技術指導(dǎo)。
如果您(nín)有機床行(háng)業、企業相關新聞稿件(jiàn)發表,或進(jìn)行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵箱(xiāng):skjcsc@vip.sina.com

")
- 2024年11月 金屬切(qiē)削機床產量(liàng)數據
- 2024年11月 分地區金屬切(qiē)削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車(chē))產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量(liàng)情(qíng)況
- 2024年10月 新能源(yuán)汽車產量(liàng)數(shù)據
- 2024年10月 軸承(chéng)出口(kǒu)情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年(nián)10月(yuè) 金屬切削(xuē)機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽(qì)車產量(liàng)數據
- 2028年8月 基本型乘用(yòng)車(轎車)產量數據