


磨削(xuē)加工技術是先進製造技術中的重要領域(yù)。高速及超高速磨削技術能極(jí)大地提高生產率和產品質量,降低成本,實現難(nán)加工材料(liào)和複雜型麵的精加工。砂輪(lún)高速旋轉所產生的(de)不平衡離心力與轉(zhuǎn)速的平方成正比。所以,在高速磨(mó)削(xuē)過程中,即(jí)使極小的不平衡質量也會產(chǎn)生非常大的不平(píng)衡離心力,造成機床振動,軸承磨損,被磨削工件產生表麵波(bō)紋(wén)和增大表麵粗糙度值,嚴重影響磨床的加工精度和使用壽命[1]。
因此(cǐ),在高速磨削的技術體係中,高速砂輪的在(zài)線自動平衡(héng)技(jì)術是必不可少的。美國、德(dé)國和日本等工業(yè)發達國家在高速磨床上均已普遍采用了自(zì)動(dòng)平衡係(xì)統。在我國,高精度的(de)自動平衡產品完全依賴(lài)國外進
——————————————————
基金項目: 國家重點基礎研究發(fā)展計劃( “973”計劃) 項目( 2012CB026000) ; 國家自然科學(xué)基金重點項目( 51135001)收稿日期: 2013 - 10 - 21 修改稿收到日期: 2014 - 02 - 11第一作者潘鑫男(nán),博士生,1987 年(nián)生通信作者高金吉男(nán),教(jiāo)授,中國工程院院士,1942 年生
口,且價格昂貴,所(suǒ)以(yǐ)造成該類產品的使用受限,僅在高檔機床上可見。已有的自(zì)動平衡產品主要包括機電式(shì)[2]、電磁滑環式[3 - 4]和(hé)注液式[5]三種(zhǒng)。在前兩(liǎng)種平衡裝置中,不可避免的要在旋轉部分引(yǐn)入偏心質量塊、機械傳動鏈或其它可動部件。在較高(gāo)的工作轉(zhuǎn)速下,偏心質量塊會使支撐軸承承受極大的旋(xuán)轉載荷,造成支撐(chēng)軸承變形、卡滯甚至損壞; 機械傳動鏈也會受離心力幹擾甚至鎖死,不能正常工作。而注液式平衡(héng)裝置因旋轉部分無可動部件,不受高速離心力的幹擾,更適(shì)用(yòng)於高速的場合。但(dàn)注液(yè)式平衡裝置因注液這一過程,需要(yào)多個液壓部件和液體回收、過濾裝置,價格昂貴,且平衡能(néng)力(lì)隨平(píng)衡過程逐漸減小,平衡狀態不能停機保(bǎo)持。所以,近年來,國內外的(de)很(hěn)多學(xué)者致力於(yú)改進(jìn)該類平衡裝置,但在克(kè)服(fú)已(yǐ)有缺陷的同時,均會帶來新(xīn)的問題: 如Kerlin 等(děng)的液(yè)氣式平衡裝置因驅動(dòng)液體轉移的(de)方式為加熱汽化,使該裝置的響應速度慢,且(qiě)製造難度大; Steere Jr. 等的氣壓液體式平衡裝置(zhì)因在(zài)連通管上安(ān)裝(zhuāng)了四個止逆閥,使(shǐ)該裝置不再(zài)適用於高速場合; 釋液式平衡裝置雖可以做到平(píng)衡(héng)液(yè)的可控排出,但注液、釋液兩種運行方式轉換條件的判斷困難,而且(qiě)平衡頭旋轉部分具有可(kě)動部件———電磁閥(fá); 連續注排式
平(píng)衡裝置雖然具備了既能注液又能排液的功能,但(dàn)無休止的注液、排(pái)液,對執行機構的可靠性有很高要求[6 - 10]。在本文中,介紹一種新型的氣壓液體式在線(xiàn)自動平衡係統(tǒng)[11 - 12],該係統(tǒng)的旋轉部分(fèn)無可動部件,在整個平衡過程中,不需要外界注入(rù)或向外界排出平衡液(yè),平衡液僅在密閉的儲液腔間進行(háng)定向轉移。為該類係統提供了一種靶向控製策略,並通過實驗,驗證了該類係統的可靠性。
1、工作(zuò)原理與係統設計
氣壓液體(tǐ)式自動(dòng)平衡裝置的工作(zuò)原理為: 在(zài)對(duì)稱分布的四個儲液室中預先充入平衡液,位置相對的兩個儲液室的液相通過連通管相連,以壓縮空氣為動力(lì)源驅動(dòng)平衡液(yè)經連通管在兩個儲液室之間作可(kě)控性流(liú)動。通(tōng)過改(gǎi)變平衡(héng)盤內的(de)液體分(fèn)布,達到在線平衡受控設(shè)備的目的。
該係統(tǒng)主要包括平衡裝置、氣源係統和測控係統三部分,其工作原理圖(tú)和係統(tǒng)框圖分別如圖1 和圖2所示。
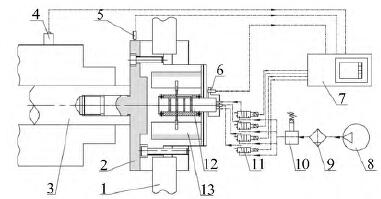
1. 砂輪2. 接杆法蘭3. 電主軸轉子4. 加速度傳(chuán)感器(qì)
5. 位移傳感器6. 轉速傳感器7. 控製器8. 氣源( 空壓機)
9. 空氣過濾器10. 空氣減壓閥11. 電磁閥組12. 氣源分配
器13. 平衡盤
圖1 自動平衡係統工作原理圖
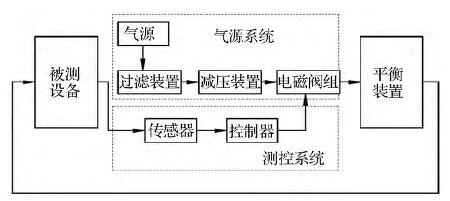
圖2 自動平衡係統框圖
平衡裝置由平衡盤(pán)和氣源分配器組成。其中,平衡盤通過(guò)接杆法蘭與電主(zhǔ)軸轉子連接在一(yī)起,隨電主軸同步旋轉,內含(hán)四個對稱分布的扇形儲液腔用於(yú)儲存平衡液,其儲液腔蓋板內加(jiā)工有兩條弧形的連通(tōng)管(guǎn)路,用於作為兩對儲液(yè)腔間液體轉移時的液體流道。氣源分配器用於(yú)實現壓縮空氣從靜止(zhǐ)管路到旋轉儲液腔的動靜傳(chuán)遞,由定子(zǐ)、中間套和前後軸承組成: 定子靜(jìng)止不動,內部加工有四條(tiáo)軸向通道,分別連接四條進氣管路,其外徑刻有四條軸向均布的環槽,四條環槽分別與四條軸(zhóu)向通道相連; 中間套(tào)隨儲液腔同步旋轉,其內徑與定子外(wài)徑間(jiān)有(yǒu)一定(dìng)間(jiān)隙,且加工有四個與儲液腔(qiāng)內(nèi)壁相通的進氣孔,分別對應定子上的四個環槽,用於將(jiāng)四路氣體引入相應儲液腔; 前後兩軸承則可以保證中間套和定子(zǐ)在較小間隙下長周期、穩定地運行(háng)。
氣源係統由氣源、過濾器、減壓閥和電磁閥組構成,主要用於將常壓空氣進行加壓、過濾,並通過減壓閥調整至適當壓力,最終經過電磁閥組有方向的輸入執行(háng)器。該平衡係統在平衡過程中所(suǒ)需壓縮氣量很小,驅動壓力一般低於0. 8 MPa,且在平衡過程完成後,即通過電磁閥切斷氣路,無需持續的(de)注氣,所(suǒ)以利用小型(xíng)的(de)空壓機或(huò)普通(tōng)的壓縮空氣鋼瓶即可滿足本係(xì)統對氣源的要求。
測控(kòng)係統由傳感器和控製器組成,傳感器又分振動傳(chuán)感器(qì)和轉速傳感器,振動檢測可以使用加速(sù)度傳感器也可(kě)以使用位移傳感(gǎn)器。傳感器用於檢測軸承座或平衡盤的振動信號以及設備轉速信號; 控製器對振動信號進行采(cǎi)集(jí)、提取,獲得振動數據,並據此輸出控製信號,控製電磁閥組(zǔ)的(de)通斷。
2、控製策略(luè)
本文采用(yòng)靶向控製方法對平衡裝置進行在線控製,其特征在於: ① 在平衡裝置執行操作前,係統已經(jīng)準確定位不平衡(héng)量的大小和相位; ② 平衡過程中,係統有確定目標的進行注氣操作; ③ 快速計算注氣時間,以使係統振動幅(fú)值(zhí)單調下降,平衡過程(chéng)無(wú)錯調現象。
2. 1 基本原理
靶向控(kòng)製方法主要由5 部分組成:
( 1) 數采,用於接收被測設備的實時振動信號,提取其中(zhōng)的一倍頻(pín)分量;
( 2) 定位(wèi),利用一倍頻信(xìn)號計算(suàn)被(bèi)測(cè)設備(bèi)的不平衡量的大小和相位;
( 3) 轉換(huàn),將不平(píng)衡量轉換為平衡裝置中氣體驅動液體轉移的時間控製量;
( 4) 分配,根據不平衡量的大小和相位,將時間控製量
( 5) 編譯,將控製時長形成相應的(de)控製指令輸出,驅(qū)動執行器控製各儲液腔對應電磁(cí)閥的開閉。
其中,數采部分通常采用跟蹤濾波或(huò)FFT 等(děng)方法提取振動信號中的一倍頻分量; 對於(yú)不平衡量的(de)定位,通常采用影響係數法來確定不平衡量的大小和所在相位; 在計算時間控(kòng)製量的過(guò)程中,可采用比例係數(shù)法或自適應控製算(suàn)法確定注氣時間,這裏簡述比(bǐ)例係數法的基本原理。
假設通過影響係數法計算得係統的(de)初始不平衡量為U → = U∠θ。
由平(píng)衡(héng)能力U 和轉移質量(liàng)m 間的關係知
U = km ( 1)
式中,k 表示轉移單位質量(liàng)的平衡液所形成的(de)平衡能力。因(yīn)此,當(dāng)初始不平衡向量為U → 時(shí),可(kě)認為初始不平衡質量向量為M → ,計算公式如下(xià):
![]()
設在平衡液的轉移過程中,連(lián)通管中平衡液的質量流量為q,則當轉移質量(liàng)為m 時,所需注(zhù)氣總時間的大小為:
![]()
氣壓液體(tǐ)式平衡裝置,利(lì)用壓(yā)縮(suō)空氣驅動平衡液轉移。為了使平(píng)衡裝置在相位為( β + 180°) 的相位產(chǎn)生校正質量m,係統應在(zài)β 的相位注入壓縮空氣,所以注氣相位的公(gōng)式為:
ψ = β + 180° - 180° = θ ( 4)
注氣總時間以及(jí)注氣相位二者合成為注氣(qì)時間向量T → ,用公式表示為:
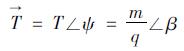
將注氣總時間按正弦或餘弦定理分解到(dào)各個儲液腔,即可得到各腔對應電磁閥的開閉時間(jiān)。
在(zài)注氣(qì)時間的分解過程中(zhōng),當注氣相位處於0°、90°、180°和270°四個(gè)位置(zhì)時,隻需向單腔注氣; 當(dāng)注氣相位處於45°、135°、225°和315°四個位置時,需同(tóng)時向(xiàng)兩腔注氣,且兩腔注氣時間相同。對於這兩種情況,直接執行即可,不需要區分(fèn)先(xiān)後(hòu)。但除這八個位置之外,其餘位置均需(xū)兩個腔注氣,且注氣的時間長短(duǎn)不同。這時,需(xū)要根據控製效果,考慮注氣(qì)的先後順序,即優化控製路徑。
2. 2 控(kòng)製路徑(jìng)
現以(yǐ)注氣相位在0° ~ 45°範圍內為例,進行控製效果分析。
設初(chū)始不平衡向量為M → ,將該(gāi)不平衡質量(liàng)向實軸和虛軸分解,得
M →= m∠β = mcosβ + i·( msinβ) ( 6)
此時,控製係統(tǒng)需要分別向A、B 兩儲液(yè)腔注氣(qì)。若兩平衡管的質量流量相同,且均為q,則A 腔和(hé)B 腔對應的注氣時間分別為
![]()
式中: ta > tb > 0,即A 腔對應電磁閥的注氣時間長(zhǎng)於B腔對應電磁閥
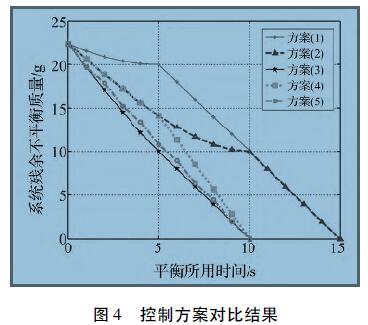
在這種情況下,控製係(xì)統的(de)注氣順序存在5 種方案:
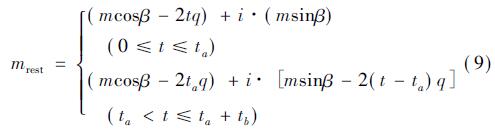
( 1) 先開B 腔(qiāng)電磁閥,待(dài)B 腔注氣結束後,打開A 腔電磁閥,直至(zhì)注(zhù)氣結束(shù)。控製器輸出的控製(zhì)指令包括兩部分,以時間t 為變量(liàng),剩餘不平(píng)衡量可用(yòng)公式(shì)表示為(wéi)
( 2) 先開A 腔電(diàn)磁閥,待A 腔注氣結束後,打開B腔電磁閥,直至注氣(qì)結束。平衡過程中,剩餘不平衡量可用公式表示為
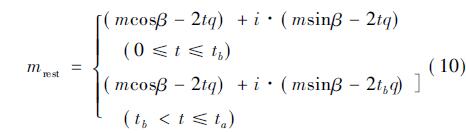
( 3) 同時(shí)打開A、B 兩儲液腔電磁閥,待B 腔注氣結束後,關閉B 腔對應電磁(cí)閥,A 腔電磁閥繼續打開,直至注氣結束。平衡過程中,剩餘不平衡量可用公式表示為
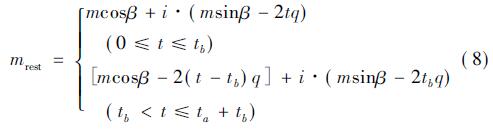
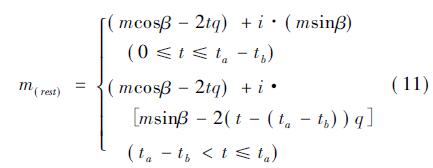
( 4) 首先打開A 腔電磁閥,在A 腔注氣一段時間後,開啟B 腔電磁閥,最終兩電磁閥同時停(tíng)止(zhǐ)工作(zuò)。平衡過程中,剩餘不平(píng)衡量可用公式表示為
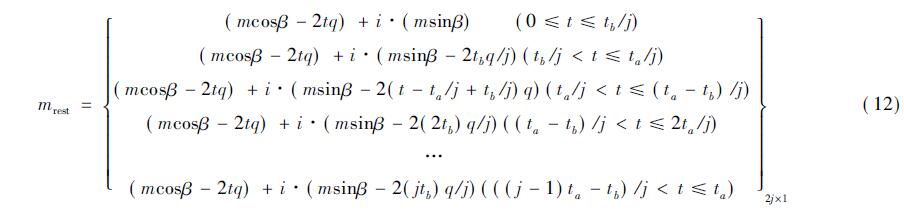
( 5) 將B 腔電磁閥的通電時間(jiān)均分為j 份,在打開A 腔電磁閥注氣的過程中,B 腔電磁閥間斷性打開,最終使兩電磁閥幾乎同(tóng)時停止工(gōng)作。在該平衡過程中,剩餘不平衡量的計算需分次2j 個(gè)區間(jiān)進行分段考慮,具體可用公式表示為
假設: mcosβ = 20( g) ,msinβ = 10( g) ,q = 1( g /s) ,則m 槡= 10 5( g) ,ta = 10( s) ,tb = 5( s) . 利用上述(shù)公式,計算5 種(zhǒng)方案的控製過程中,剩餘不平衡量的(de)變化曲線,結果如圖4 所示。
由該(gāi)圖曲線知,方(fāng)案( 3) 對應的控(kòng)製(zhì)速度最快,控製(zhì)效(xiào)果最好,所以在控製程序中,以方案( 3) 作為最終的控製方案,即當需要同時向兩個(gè)儲液腔注氣時,控製指令(lìng)的編譯包括3 步: ① 同時打開兩目標儲液腔(qiāng)對應電磁閥,向儲(chǔ)液腔進行注氣,直至注氣(qì)時(shí)間短的儲液腔注氣結束(shù); ② 關閉注氣時(shí)間短的儲液腔對應的電磁閥(fá),注氣時(shí)間長的儲液腔(qiāng)對應電磁(cí)閥繼續開放,直至注氣結束; ③ 注氣結束,關(guān)閉電磁閥組。
3、實驗研究
為了驗證氣壓液體式自動平衡裝置的平衡效果,在臥式磨削試驗台上進行了相關實驗。
3. 1 實驗裝置
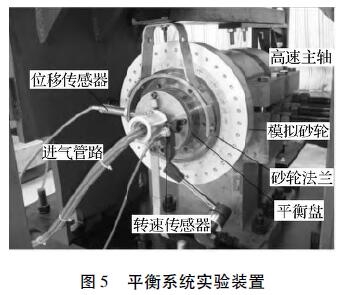
試驗台所用電主軸為磨削專用電主軸,功率9 kW。所用模擬砂輪的規格參數與標準CBN 砂輪的規格參數相同,外(wài)徑250 mm,內徑127 mm,厚(hòu)20 mm。模擬砂輪由左右兩砂輪法蘭夾緊,固定在(zài)電主軸上。平衡盤和砂輪左法(fǎ)蘭加工成一(yī)體,位(wèi)於砂輪盤的內部,便於更好的平衡係統由(yóu)砂輪不平衡帶來的振動(dòng)。平衡盤外徑100 mm,內含儲液腔深60 mm,所(suǒ)用平衡液為(wéi)矽油,設計平衡能力為(wéi)1 356 g. mm。在平(píng)衡(héng)盤的端部加工一凸台(tái),利用接近(jìn)開關測量試驗台轉速和振動相位。平(píng)衡盤的長度大於砂(shā)輪和砂輪法蘭(lán)的(de)安裝尺寸,高出(chū)的部分用(yòng)於作為位移傳感器的(de)測量麵,因為該測量麵非常接近砂輪,且隨砂輪(lún)同步旋轉,所以可以直接的反應(yīng)砂輪的實際振動。該實驗裝置如圖5 所示。
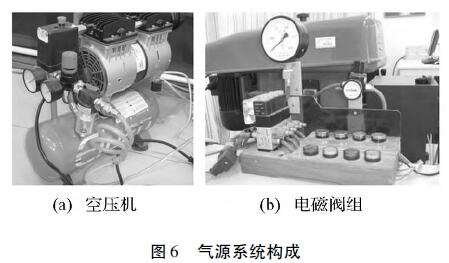
本(běn)實驗(yàn)裝置選用一台無油空氣壓(yā)縮機作為壓縮空氣氣源。該空壓機的最高工(gōng)作壓力為0. 8 MPa,氣(qì)體流量為89 L /min,並(bìng)配(pèi)有一容積為6 L 的儲氣罐,用於儲(chǔ)存壓縮空氣。在空壓(yā)機出口處加(jiā)裝(zhuāng)過濾減壓器,將壓縮空氣壓力減壓至0. 3MPa。4 台兩位三(sān)通(tōng)電磁(cí)閥構成電磁閥組,分別對應平衡盤內的4 個儲液腔,由一台減壓閥統一調整電磁閥組進口處的氣體(tǐ)壓力。該氣源係統(tǒng)如圖6 所示。
位移傳感器(qì)和(hé)接近開關的電(diàn)壓信(xìn)號通過信號調理卡和數據采集卡,輸入工(gōng)控機。在工控機中,利用Labview軟件,編製數據處理和控製程序。在該程序中,利用輸入的位移信號和轉(zhuǎn)速信號,計(jì)算被(bèi)測係統當前振動(dòng)的一倍頻振動幅值和相位,並判斷被測係統的振動幅值是否超出預設值(zhí)。當判斷(duàn)結果為真時,確定係統初始不平衡量的位置和大小,並計算各電磁閥的通電時間,輸出控製指令。控(kòng)製指令通過數字(zì)I /O 卡輸出(chū)脈衝信號,進而控製(zhì)各電磁閥的通電時間。當某電磁閥通電後,該電磁閥打開,壓縮空氣通過進氣管路進入(rù)平衡裝置,對相應儲液腔實現注氣操作。實驗(yàn)證明每次主動(dòng)平衡過程多(duō)次(cì)注氣操(cāo)作的(de)累計時間不應(yīng)大於30s,因(yīn)此在平衡程序中設定30 s 為(wéi)一次平衡操作的(de)極限時間,如果30 s 內不能將振動幅值降低至設定值以下,則停止本(běn)次平(píng)衡操作,並提示使用者,驅動壓力過低或不平(píng)衡量已超出(chū)了該裝置的平衡能力。
3. 2 實驗效果
因該實驗裝置的臨界轉速為7 000 r /min,所(suǒ)以本文僅在臨界轉速以下進行自動平衡實驗,所選轉速分別為3 000 r /min,5 000 r /min 和5 500 r /min,分別對應砂輪線速(sù)度(dù)為39 m/s,62 m/s 和72 m/s,具體平衡效果如(rú)圖7 所示。
在3 000 r /min 的轉速下,係統初始(shǐ)振動幅值為6. 3 um,經(jīng)過11 s 的(de)自動平衡後,係統振動幅值降低至0. 32 um,振幅(fú)下降比例(lì)達94. 9%;
在(zài)5 000 r /min 的轉速下,係統初始振動幅值為8. 5 um,經過15 s 的自動平衡(héng)後,係統振動幅值(zhí)降低至0. 35 um( P - P) ,振幅下降比例達95. 9%;
在5 500 r /min 的轉速下,係統初始(shǐ)振(zhèn)動幅值為10. 2 um,經過15 s 的自動平衡後,係統振動幅值降低至0. 37 um,振幅下降比(bǐ)例達96. 4%。
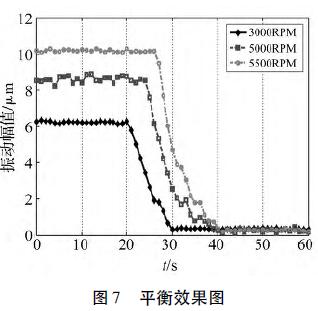
從此實驗效果可以(yǐ)看出,本文所(suǒ)介紹的平(píng)衡(héng)裝置在3 種工況下均可在15 s 內有效地降低係統振動幅值,且振(zhèn)幅下降比例均在90%以上,平衡性能可靠。
4、結論
液體(tǐ)式自動(dòng)平衡裝置結構簡單、旋轉(zhuǎn)部分無可動部件,比機械式平衡裝置更適於高速的(de)場合。但(dàn)已有的(de)注液式平衡裝置由於(yú)注液(yè)這一過程,具有不可避免的一些缺陷,限製(zhì)了該類產品的使用。本文介紹(shào)了一種新型的液體式平衡裝置,不僅擺(bǎi)脫了注液這一(yī)過程,且旋轉部分無需增加可動部件。為該平衡係統提供了一種靶(bǎ)向控製策略,且對(duì)不同注氣順序的平衡效果進行了定量分析,選出了最優的控製路徑。通過實驗結果表明,該類平衡裝置可以在多個工作轉速下,快速、有效地降低係(xì)統的不平衡振動。
如果您有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
州金(jīn)馬")
")
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承(chéng)出(chū)口情況
- 2024年11月 基本型乘(chéng)用車(轎車)產量數據
- 2024年11月 新能源汽車產(chǎn)量數據
- 2024年11月 新能源汽(qì)車銷(xiāo)量(liàng)情況
- 2024年10月 新能源汽車(chē)產(chǎn)量數據
- 2024年10月 軸(zhóu)承出(chū)口情況
- 2024年10月 分(fèn)地區金屬切削機床產(chǎn)量數據
- 2024年(nián)10月(yuè) 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽(qì)車產(chǎn)量數據
- 2028年8月 基(jī)本型乘(chéng)用車(轎車)產量數據