")



機器人如何做到自主決(jué)策?機器人視覺(jiào)給出答案
2019-7-5 來源: 作者(zhě):
工業視覺中,機器人視覺領域在技術和(hé)商用程度上(shàng)均(jun1)有較好的表現。本文從機器人視覺(jiào)的(de)市場需求、技術原理以及(jí)發展趨勢三個層麵,深入(rù)淺出地闡述了機器人視覺在工(gōng)業(yè)智能進程中的重要地位。
智能製造,機器人視覺,工業視覺(jiào)
工業視覺是當前工業領域應用(yòng)較廣的 AI 技術,主要用於質量檢測、尺寸測量(liàng)、缺陷檢查、識(shí)別和定位等,在汽(qì)車和電子 3C 製造業中應用廣泛。而在工業視覺中,機器人視覺領域在技術和(hé)商用程度上均有較好的表現。
本文從機器人視覺(jiào)的(de)市場需求(qiú)、技術原理以及發展趨勢三個層麵,深入淺出地(dì)闡述了機(jī)器人視覺在工業智(zhì)能進程中的重(chóng)要地位。
作者表(biǎo)達的精髓觀點有:
1. 工業機(jī)器人需(xū)要替(tì)代更多重複性(xìng)的、生產(chǎn)環境惡劣的勞動,而機(jī)器人視覺(jiào)可使工業機器人擁有(yǒu)感知和決策能力,以適應更多“機器換人”的生產場景。
2. 工業(yè)機器人可通過(guò)雙(shuāng)目或多目技術、激光相(xiàng)機技術、三維傳感器技術等實現智能(néng)的視覺功能,進而擺脫(tuō)人為(wéi)操控限製(zhì),大幅提(tí)高(gāo)生產效率。
3. 目前工業機器人處在增加視覺、觸覺等(děng)感知力的階段,未來將向著AI+AR的方向發展。AI能夠提高機器人識別的準確率,AR保證了機器人的感知力,更好的與人協作。
本次分享的內容來自演繹 inSite 第十七期節目&清華校(xiào)友總會先進製造專業委員會(huì)聯合(hé)專場(chǎng)“工業機器(qì)人視覺——賦予機器(qì)柔性與智慧(huì)”中吳哲明博士的演講。
大家好,我是來自清研先進製造研究(jiū)院(洛陽)有限公司的吳哲明,今天我將帶領大家走進未來機器人的(de)世(shì)界。
讓工(gōng)業機器人做重複性工作,而把人的智能(néng)發揮到(dào)最大程度
首先問大家一個問題,平時住在家(jiā)裏最讓你頭(tóu)疼的一(yī)件事是什麽(me)?對於有兩個孩(hái)子的我來說,最頭疼的是每次回(huí)到家裏,都要麵對孩子(zǐ)弄得(dé)一團糟的房間,而每次收拾這(zhè)個房間,重複的勞動讓我累(lèi)覺不愛,相(xiàng)信很多人都跟(gēn)我有一樣的煩惱(nǎo),那你們希不希望有個智能的機器人能替你收拾這個房間呢?

工業(yè)機器人在(zài)打掃房間(來源:the Salisbury Robotics Lab, Stanford University)
正如圖1的工(gōng)業機器人,它可以走進你的房間,把沙(shā)發(fā)收拾幹淨,把(bǎ)你(nǐ)給孩子講的故事(shì)書羅(luó)列整齊,把孩(hái)子玩的玩具放進箱子裏,你(nǐ)隻需要在旁邊葛優(yōu)躺,家裏的一(yī)切都會嶄新如初,是不是很吸引人?
但現在市麵上沒有這個機器人,那視頻裏的機器人是怎麽做到的?實際是旁邊有個(gè)人通(tōng)過一個遙控(kòng)手柄一點一點地控製這個機器人把所有的事情做(zuò)成,幹了幾個小時,甚(shèn)至比人親自做的時間還長。那機(jī)器人(rén)離我們想象中的未來機器人差了些什麽?還差(chà)感知世界的能力和作出自我決策的能力,也(yě)就是相當於有了手(shǒu)臂(bì)和身體,但沒有眼睛和(hé)大腦,這個機器人不具備智能(néng)。
其實我們在家裏(lǐ)可以一邊聽音樂一邊幹活,並不是那麽枯燥,但在工廠裏,工人要麵對的是焊接的粉塵撲麵而來,是打磨飛濺的火花甚至鐵屑環繞身體,是旁邊金屬性的撞擊刺痛耳膜,這些都會對人的身體造成永久的傷害。

焊(hàn)接環(huán)境(來源:Pixabay)
這就(jiù)是(shì)為什(shí)麽(me)現在 90 後、00 後,寧可領個並不高的工(gōng)資,也要待在(zài)辦公室或(huò)宅(zhái)在家裏,哪怕再高的工資(zī)都不願意去工廠,或(huò)者可能這個年輕人幹了半年就辭職了,或者心情不好導致工件質量出現問題,所以在工廠環境裏,更需要工業機器人把人類從惡劣的環境裏解脫出來,用工業機器(qì)人替代人去幹焊接、打磨、搬運重物(wù)這些繁重的工作,而把人(rén)的智能發揮到(dào)最大程度。

特斯拉機器人工廠(來(lái)源:OPPORTUNITYENERGY)
其(qí)實上世(shì)紀很早就有了工業機器人,例如在汽車行業這種產品一致性非常高的領域裏,工業機器人應用已(yǐ)經非常廣泛了。圖3是特斯拉最新的(de)、全球最先進的機器人工廠,它造的特斯拉的模型都比較統(tǒng)一,機器人要幹什麽?隻要給它(tā)編好程從 A 到 B,它就可以一直這樣(yàng)幹,製造的汽車都是一樣的。
賦予機器人智能的(de)視(shì)覺,真正做到機(jī)器換人
然而在通用工業領域件尺寸(cùn)並不固定,可能今天來了一個一米的工件,明(míng)天客戶要求你做一個半米(mǐ)的工件,原先的工業機器(qì)人的程序就不能用了,或者今天的物流是個箱子,明天(tiān)是個柔性的塑(sù)料袋,而(ér)且(qiě)隨機地放置,這些問題都不(bú)能讓不夠智能的機器人來(lái)解決。
那解決這些問題要(yào)通過什麽?就像前麵的視頻裏,需要一個遙控手柄,在機器人行業裏實際就是個操縱盒,告訴機器人要走一米的長度,或者半米的長度。而如果換了一個物件,人不去(qù)盯著它,就會像盲人摸象一樣,機器人不知道要做什麽事,很有可能把(bǎ)這個工件做錯。那怎麽解決這個問題?我們提出的解決思路是給工業機器人一雙慧眼。
什麽是慧眼?慧(huì)眼就是智能的視覺,我們給機器人智能的視覺,機器人就具備了柔性的能力。

慧眼與工業相機
機器人視覺到底是(shì)怎麽工作(zuò)的?它其實就是具備(bèi)了人(rén)眼的功能,人眼幹什麽機(jī)器人視覺就幹什麽。如(rú)圖4所(suǒ)示,右邊是替代(dài)人眼的工業相機,跟(gēn)手機相機沒太大區別,隻不(bú)過更結實,能夠在工廠環境裏(lǐ)抗幹擾。
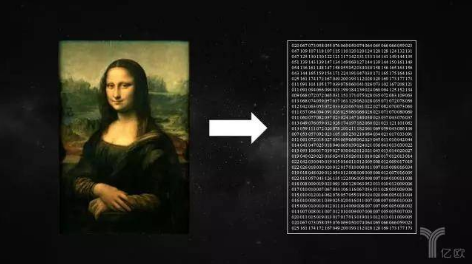
圖像與二維數組
如圖5所示,用工業相機替代人眼實現視覺的功能,人眼(yǎn)看到的(de)是蒙娜麗莎的畫像(xiàng),而工業相機獲得的是一個二維數組,二維數組裏每一個數字都代表圖像(xiàng)裏的每個像素,通過獲(huò)得的數組加上開發的智能軟件和算法就可以獲取想要的信息。
工業機器人(rén)在工業中經常要解決三維(wéi)的問題。剛才所說的是一隻眼睛,隻能看到二維的世界,在三維到(dào)二維的過程(chéng)中損失了一個深度信息,而我們要做的(de)就是利用雙目或者多目(mù)的方法(fǎ)把丟失的信息找回來,用兩個攝像頭(tóu)從不(bú)同的角度去看,可以把特征匹配起來,把二維又重構成(chéng)三維,甚至用多目的方法會比人的(de)眼睛更加出色、更加智能。

搭配眼睛的工業機器人(來源:PICKIT3D)
如圖6右邊是一個工業機器人,左邊則是我們給(gěi)它配的眼睛,它的眼睛可以不斷地(dì)識別不同種類不同樣子的物體,隨機擺放也(yě)可以找(zhǎo)到物體的位置,獲取物體的形狀信息。而機器人有了眼睛、有了決策(cè)能力(lì),就可以進行自(zì)主(zhǔ)地隨機地碼放(fàng),這機(jī)器人就有了柔性和智慧。
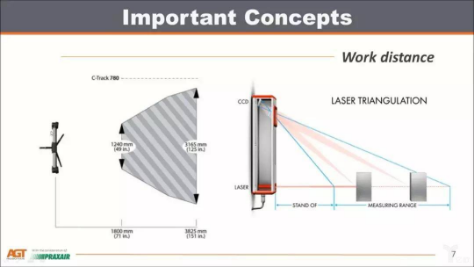
工業相機(來源:AGTROBOTICS)
在工廠裏並不是都用(yòng)雙目的方式,還會(huì)采用更加可靠的方式。如圖7所示是 CCD,就是常用的工業相(xiàng)機(jī),下麵是用一個抗幹(gàn)擾的強激光打到一個物體上,近的時候激光(guāng)反射到相機上是一個位置(zhì),遠的時候是另一個位置,通過兩個位(wèi)置的變化就知道物體到底離我們近(jìn)還是遠,這是一個點的問(wèn)題。
而線的問題上,打一個橫的激光可以獲得一個線上物體的三維位置,而把這個線通過運動掃描就可以獲得完整物體(tǐ)的三維位置,通過這個物體的三維位置加以我們的算法,就可以告訴機器人應該怎麽做(zuò)這件事。
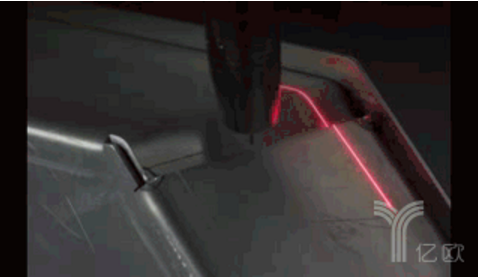
工業機器人(rén)掃描工件(來源:YaskawaUK)
如圖8所示,工業機器人終端的一個焊槍上,加了三維的傳(chuán)感器,通過結構光掃描把(bǎ)整個物體(tǐ)的形貌掃下來,然後告訴機(jī)器人應該從工件哪裏開始焊接在哪裏停止,如果工業(yè)變了(le)照樣(yàng)可以通過掃描來確定運(yùn)動軌跡。從視頻中可以看到,最後機(jī)器(qì)人通過掃描發現了(le)終點,運動應該(gāi)停止它就會抽身(shēn)離去,這樣的(de)工業機器人就具備了完整的視覺,不需要人再去操控它。
圖6、圖8都(dōu)說明了工業機器人搭配視覺的(de)好處,首先不需要再雇一(yī)個懂機器人編程(chéng)的人去控製機器人,真正做到了機器換人的目的,同時可以實現柔性的加工,通過加入視覺大大地提高生(shēng)產效率(lǜ),而且可以保證生產質量,機(jī)器人(rén)不會像人一樣鬧情緒。
未來機(jī)器人(rén)如何提高智能?
接下來跟大家分享一下工業機器人的發展趨勢,工業機器人上世(shì)紀(jì)中代就已經開始發(fā)展,最早期經曆了第一代機器人,也就是現在使用的主流,機器人需(xū)要教它怎(zěn)麽幹,它才知道怎麽幹,這種使用已經受限(xiàn)了。
現在機器(qì)人正處在第二(èr)個階段,就(jiù)是增加視覺乃至觸覺等(děng)一係列的傳感的方(fāng)法,讓這個機(jī)器人更加(jiā)智能(néng),更加具有柔性。而接下來我想給大家展望一下未來機器人的模樣,就是我們期望的(de)主流,要提高它的智能、做自主的決策。
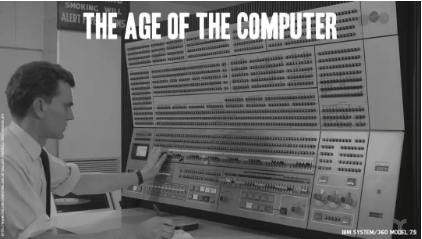
上世紀 60 年代 IBM 開發的計算機(來源:CHILTON-COMPUTING)
從我的角度來看,機器人未來發展方向(xiàng)是(shì)加上 AI 和 AR。首先來看 AI,圖9是上世紀 60 年代 IBM 開發的世界最新型的計(jì)算機,大概(gài)有一個小房間那麽大,正(zhèng)是用它把人類通過阿波羅計劃送上了月(yuè)球,可(kě)這個計算機的計算能力甚至不如(rú)現在手機計算能力的 1% 甚(shèn)至 1‰,人類已經通過摩(mó)爾定律掌握了大量處理數據的硬件計算能力(lì),所以我們可以引入深度學(xué)習這種人工智能方法。
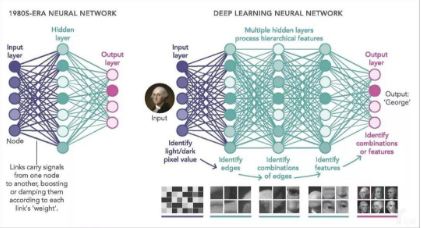
通(tōng)過圖片訓練得到人(rén)名(來源:RESEARCHGATE)
圖10左(zuǒ)邊是喬治華盛頓的圖像,我們通過不斷地圖片訓練,不斷的大數據的引入(rù),給它供應很多人臉的數據,最後可(kě)以得出我們要(yào)的結果(guǒ)——他的名字。而工業機器人通過大量(liàng)的訓練,也可(kě)以通過視覺判斷這是什麽樣的東(dōng)西,我應該怎麽做,有了 AI 的功(gōng)能,機器人未來將會(huì)更加強大。
而通過 AR 使得人和機器人相互作用,可以達(dá)到更加(jiā)智能的效果,我們說的機器換人並不是把人完全用機器(qì)人替掉,而是人幹(gàn)人最適合幹的(de)工作(zuò)、更智能的工作,機(jī)器幹重複的有傷害性的工作,而人機協作是(shì)未來的一個大方向。
我們通過 AR 的方式,可以讓(ràng)人(rén)的智能發揮非常好的作(zuò)用,人看見機器人將要做的(de)工作,隻(zhī)需要給個指示告訴機器人,1 號 2 號工件(jiàn)應該怎樣裝配,大大發揮(huī)人的智(zhì)能性。而擰螺絲甚(shèn)至焊(hàn)接這(zhè)種傷身體的工作,重複性(xìng)勞動的工作(zuò)由機器人(rén)來幹,通過 AR 和機器人技術的結合,會讓我們的未來世界中機器人應用更加廣泛。
投稿箱:
如果您有機(jī)床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
如果您有機(jī)床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
更多相關信息
馬")
