


基於PLC和伺服的砌塊碼垛機控製係統設計
2020-2-25 來源:- 作者:程永強
摘 要(yào):該文設計了一種用於砌塊行業的碼垛機控製係統.該係統使用西門子PLC對伺服電動缸(gāng)進行夾緊控製,對升降、橫移及旋轉電機(jī)進行變頻控製,並采用(yòng)編碼器對(duì)升降、橫移及旋轉位置進行(háng)精確(què)測(cè)量,實(shí)現碼垛各個動作的平滑調速,使設備運行更平穩.觸摸屏畫麵(miàn)的設計,實時監(jiān)控設備的運行狀態和位置,使得人機交互更加友好.該碼垛機投入使用後,控製係統性能穩定、碼垛周期短,極大地提高了混凝(níng)土砌塊成型生產線(xiàn)的自動化水平和生產效率(lǜ).
關鍵詞:PLC;伺服;碼垛機;控製係統
自動碼垛(duǒ)機是機(jī)、電、液一(yī)體化高新技術產品,中、低位碼垛(duǒ)機可以滿足(zú)中低產量的生產需要,可按照要(yào)求的編組(zǔ)方式和層數,完成對箱體、砌塊等各種產品的碼垛.隨著人口紅利(lì)的消失,混凝(níng)土砌塊的生產,逐步從單機走向全自(zì)動化生產線[1],其中幹產品砌塊的碼垛是(shì)砌塊生產線中的一道重要工序,一台碼垛機至少可以代替兩個工人.當前(qián)在全自動混(hún)凝土砌塊生產線常用四爪碼垛機,因其經濟實用被歐洲及(jí)國內許多廠商采用[2].碼垛機的核(hé)心單元是執行機構,目前常用的有液壓式、機械式、機械液壓(yā)相結合三種.本文選用機(jī)械式的執行機構,設計一種基於PLC的碼垛機(jī)控製係統,見圖1,其(qí)控製係統采用PLC和觸摸(mō)屏技術,結合伺服驅動和變頻(pín)調速,並采用編碼器進行位(wèi)置檢測,減少限位開關(guān)的使用,布(bù)線簡單,速度控製靈活、響應快,位置控製精度(dù)高,大大縮短了碼垛(duǒ)周期。

圖1 碼垛機實物圖
1、 碼垛機機械結構及工作原理
碼垛機主要由龍門支架、旋轉總成、橫移(yí)小(xiǎo)車(chē)、升降總成、夾頭總成、成品(pǐn)輸(shū)送機(jī)和降板節距(jù)機等組成,見圖 2.其中升降、橫移和旋轉都是采用電機驅動,變頻控製.夾頭(tóu)總(zǒng)成由四(sì)個夾爪組(zǔ)成,圖(tú)中左右方向為一對夾爪,稱(chēng)為主夾,前後方向為一對夾(jiá)爪,稱為副夾,兩對夾爪均采(cǎi)用機械同步,由兩個伺服電動缸實現夾緊與釋放.碼垛機橫移行程為 2400mm,升降行程為 1335mm,伺服電動缸的行程為500mm,額定推力15kN,額(é)定速度 166mm/s,重複定位精度 0.02mm.碼垛機的具體工作原理(lǐ)如下。
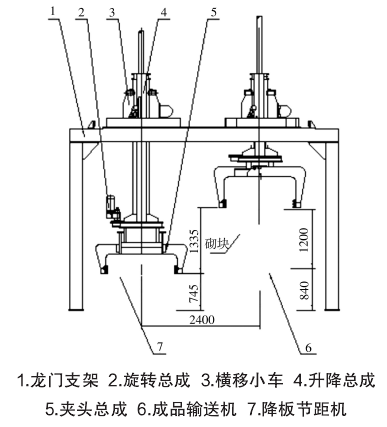
圖2 碼垛機機械示意圖
(1)機械手初始位置在左邊,高度離地麵1.1m的位置(zhì),也就是抓取工作位置上方,等待送磚到(dào)位信號,磚到位後,機械手下降(jiàng)到下限位,主夾夾緊,副夾夾(jiá)緊,夾緊後上(shàng)升。
(2)上升到位後(hòu)橫移小車右移,同時旋轉電機順時針旋轉90°,由於旋轉行程較短,旋轉位置先到達。
(3)橫向移動到右限位到達(dá)托盤(pán)正上方後,升降電(diàn)機驅動機械手(shǒu)下降,下降的高度由不同磚的高度和目標層數決定,使用編碼器對(duì)升降高度進行精確檢測(cè),到位後主(zhǔ)夾釋放,副夾釋放(fàng)。
(4)釋放到位後升降電機驅動機(jī)械手上升,上(shàng)升到位後橫移小車左移,同時逆時針旋轉90°,移動到左限位,然後下降,機械(xiè)手回到初始位置,等(děng)待下次抓取。
(5)夾爪的行程(最大張開範(fàn)圍)可以根據砌塊的尺寸進行調節(jiē),以提高碼垛效率。
2、 碼垛機控製係統設計
本文中的碼(mǎ)垛機控製係統由PLC控製器、觸摸(mō)屏(píng)、傳感檢測元件、驅動執行機構等部分組成,如圖3所示.
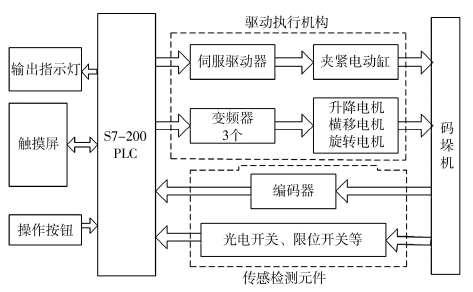
圖3 碼垛(duǒ)機控製係統(tǒng)組成(chéng)框圖
圖3中,夾(jiá)緊電動缸實現(xiàn)四個方向的夾緊與釋(shì)放,采用伺服電機進行驅動,便於實現精確快速(sù)抓取和釋放;升降、橫移及旋轉均采用三相異(yì)步電機驅(qū)動,使用變頻器(qì)進行(háng)調速.傳感檢測元件包括編(biān)碼器和開關(guān)量傳感器,升降(jiàng)方向的編碼器與變頻器配合,實現多(duō)層碼垛以及位置的精確控製;橫移和旋轉動(dòng)作,實(shí)現高低速的靈活切換,使各個動作速度(dù)更加順暢,同時節省許多減速傳感器,使布線更方便.開關量傳感器包括限位開關、電感式接近開關和(hé)光電開關,其中行程開關(guān)、電感式接近(jìn)開關分別用於檢測橫移極限位置、旋轉極限位置,起到雙重保護作用;光電開關則(zé)是用來檢測(cè)磚(zhuān)是否到位;傳感(gǎn)檢(jiǎn)測元件(jiàn)將采(cǎi)集(jí)到(dào)的現場信(xìn)息反饋給PLC,PLC發出(chū)指令控製(zhì)伺服和變頻執行(háng)相應的動作.觸摸屏選用西(xī)門子 Smart1000 IE,通過 RS485 與 PLC 進行通信(xìn),接受操作人員的(de)指令,並可以實(shí)時(shí)監控碼垛機的運行狀態,若現場發生故障時,工作人員可以通過觸摸(mō)屏給PLC發送命令進行處理(lǐ)。
2.1 PLC選型及I/O地址分配
根據係統(tǒng)控製要求和控製功能分析,選德國西門子的 S7-200 係列 CPU224 XP CN 作為(wéi)核心控製單(dān)元,另(lìng)外(wài)擴展一個(gè) EM223 CN(16 點輸入/16 點輸出(chū))模塊、一個 EM221 CN(16 點輸入)模塊和一個 EM232(2 入模擬量輸出(chū))模塊.CPU224XP 集成 14 輸入(rù)/10 輸出共 24 個數字(zì)量 I/O 點,2輸入(rù)/1輸出共3個模擬量(liàng)I/O點,6個(gè)獨立(lì)的高速計數器(100kHz),2個100kHz的高(gāo)速脈(mò)衝(chōng)輸出。
該型號PLC結構緊湊(còu)、處理速度快、價格適中,且具有(yǒu)一定的擴展能力,主要用於(yú)控製變頻器、伺服驅動器、接收編碼器的高速脈衝(chōng)及其他外部I/O 數字量的(de)處理等任務.控製係統的輸入輸出地址分配表如表1、表2所示。
表1 控(kòng)製係統(tǒng)輸入地址分配表
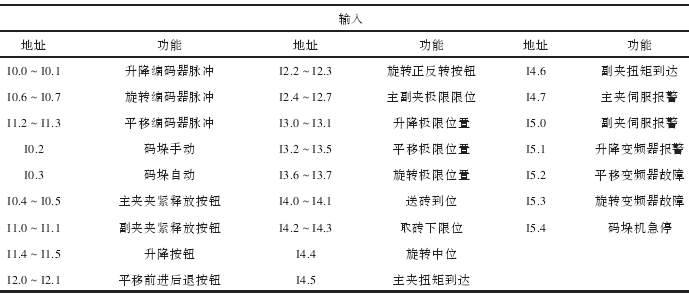
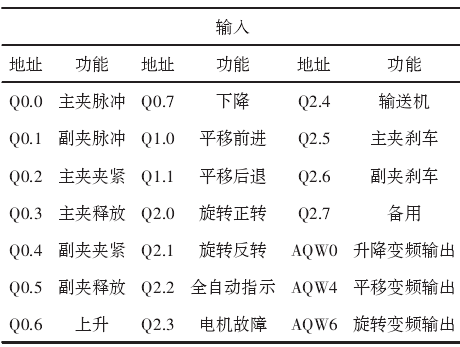
表2 控製係統輸出分配表(biǎo)
2.2 伺服控製器參數設置及接線
伺服電動缸的伺服電機采用的是北(běi)京(jīng)和利時3kW/3000轉帶刹車伺服電機,配HS係列驅動器.采(cǎi)用位置模式接線方(fāng)式,如圖 4 所示.HS 係列伺服驅動器的(de)脈衝輸入端口電平為標準 TTL 電(diàn)平(píng),脈衝(chōng)和方向信號必須配置合適的限流電阻值,否則會造成端口損壞.當VCC=24V±5%時,R=2kΩ/0.25W.圖 4 中 4 和 20 端子為扭矩到達(AT?TRQ)信號,當扭矩達到 Fn 049 設(shè)定時,4 和 20 導通,表(biǎo)示夾緊到位.6 和 22 端子為報警信號.參數配置(zhì)如下:控製模式 Fn 000 設為(wéi) 1,通常的控製端(duān)口硬線連接工作模式;Fn 001設為2,外部脈衝位置模式;外部脈衝指令方(fāng)式的旋轉Fn 038設為1,單脈衝正邏(luó)輯;電子齒輪比 Fn 050(分子)設為5,Fn 054(分母)設為(wéi) 2,當(dāng) PLC 產生 200kHz 脈衝時,伺服電機達到最(zuì)大轉速3000r/min,電動缸的速(sù)度達到(dào) 166mm/s,實際使用時,在觸摸屏上輸入電動缸需要的最大運行速度。
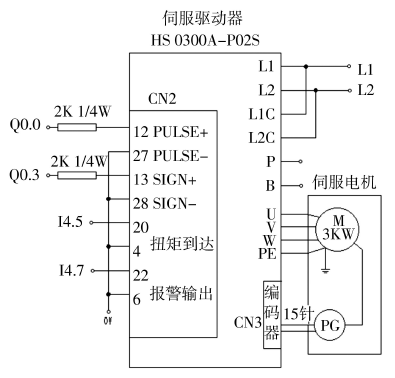
圖4 伺服驅動器及電機接線圖
2.3 變頻器設置及接線
三個變頻器采用的是(shì)施(shī)耐德 ATV312 係列(liè),以橫移(yí)電機為例,接線如圖5所示.為了能(néng)快速平穩地減速及停車,需要配置製動電阻(zǔ),消耗刹車是電機產生(shēng)的能量,來達到保護(hù)變頻器的逆變模塊,圖中3kW變(biàn)頻器選用阻(zǔ)值150Ω功率為300W的(de)鋁殼(ké)電阻.參數設置如(rú)下:控(kòng)製方式采用2線控製,加速時間 ACC 設為 0.5s,減速時間 DEC 設為0.3s,給定 1 通道設為模擬輸入 AI1,通過 PLC 發送 0~10V 的(de)模擬量控製頻率,正反轉命令則由PLC 的數字輸出點控(kòng)製。
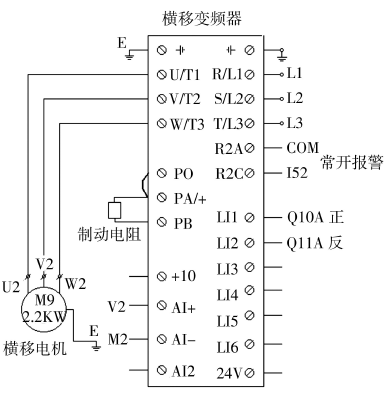
圖(tú)5 變頻器及電(diàn)機接線圖
3 、軟件設計
3.1 PLC程序(xù)設計
PLC 程序采用模塊化設計方案[4],共有 6 個子程序(xù):初始(shǐ)化子(zǐ)程序、編碼器數據處理子程序、手動運行子程序、自動運行子程(chéng)序、報警及處理(lǐ)子程序、脈衝輸出子程序等.工作模式分(fèn)手動模式(shì)和自動模(mó)式,以(yǐ)自(zì)動模式的運行流(liú)程為例,其流程圖如圖6所示。
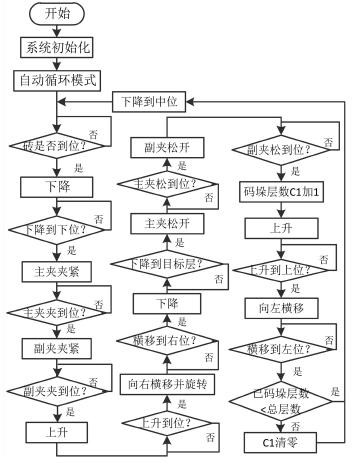
圖6 自動模式程序流(liú)程圖(tú)
編程過程中有兩個關鍵的地方需要注意.電動缸的伺服控製(zhì),采用 V4.0 STEP 7 Mi?croWIN SP9 軟件自帶的 PTO/PWM 發生器,配置Q0.0 和 Q0.1 作為方波脈衝發生器.以(yǐ) Q0.0 為例進行說明,配置SMB67為16#81,方波,周期單位為 1us,單段連續脈衝輸出,周(zhōu)期 SMW68 從觸摸屏輸入(rù)。
三個編碼器的脈衝計數,采用高速計數器HC0~HC2,三個計數(shù)器均采(cǎi)用工作模式 10,即兩路脈衝輸入的雙相正交計數,A相(xiàng)脈衝超(chāo)前B相脈衝,加計數;A相(xiàng)脈衝滯後B相脈衝,減計數。
3.2 觸摸屏界麵設計(jì)
觸摸屏畫麵主要(yào)包括目錄畫麵、參數設定畫麵、監控畫麵、報警畫麵等.監控界麵如(rú)圖7所示,界麵友好,可以直觀地看出碼垛機當(dāng)前狀態,根據要碼垛的(de)不同砌塊產(chǎn)品輸入相應的高度和碼垛(duǒ)層數,操作簡單(dān),可顯著提高控製係統操作的智能化和可視化水平 。
4 、結論
基於 PLC 和伺服控製的砌塊碼(mǎ)垛(duǒ)機控製係統,通過對(duì)夾爪電動缸的(de)伺服控(kòng)製和升降、橫移(yí)、旋轉電機的變頻控製(zhì),實現了各個動作的精確位置控製和靈活的速(sù)度控製,使碼垛機運行平穩可靠.設計的觸摸屏界麵友好,可以實時監控碼垛機的工(gōng)作(zuò)狀態,使碼垛機操(cāo)作簡單,故障診斷容易,同時方便了檢修和(hé)維護.本係統的(de)開發使碼垛機(jī)可在25s內完(wán)成一板砌塊的碼垛,效率較之前(qián)提高了約12%,對提高混凝土砌塊生產線自動化程度,以及減輕工人的體力勞動等方麵有著重要作用,可以在實際生產中推廣應用(yòng)。
投(tóu)稿箱:
如(rú)果(guǒ)您有機床(chuáng)行業、企業(yè)相關新聞(wén)稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如(rú)果(guǒ)您有機床(chuáng)行業、企業(yè)相關新聞(wén)稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
牌調查")
行業數(shù)據
| 更多
- 2024年11月 金屬切削機床產(chǎn)量數據(jù)
- 2024年11月(yuè) 分(fèn)地區金屬切削機床(chuáng)產量數據
- 2024年11月(yuè) 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據(jù)
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數據
- 2024年10月 軸承出口(kǒu)情況(kuàng)
- 2024年10月 分地(dì)區金屬切削機床產量數據
- 2024年10月 金(jīn)屬切削機床產量(liàng)數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月(yuè) 新能(néng)源汽車產量數(shù)據
- 2028年8月 基本型乘用車(轎車)產量數據