



基於數字孿生技(jì)術的五軸(zhóu)聯動坐標轉換
2020-9-17 來源:中國科學(xué)院寧波材料(liào)技術與工程研究所等 作者:秦秀,張文武,茹浩磊,張天潤(rùn),王(wáng)吉(jí)
摘要: 針對(duì)現有坐標變換公式計算繁瑣且容易出(chū)錯的問題,將數字孿生技術應用(yòng)到五軸聯動設備的坐標變換(huàn)過程中。在 NX 軟(ruǎn)件中搭建了五軸設備的精準零部件模型,並將模型導入 Simscape/Multibody 模塊進行了多剛(gāng)體物(wù)理建模。創建五軸聯動設備的數(shù)字孿生模型後,開展坐標變換仿真(zhēn),並運用公式計算驗證了仿真模型(xíng)的正(zhèng)確性。
關(guān)鍵詞: 數字孿生; 五軸聯動; 坐標變換
1、引言
數字孿生是指針對(duì)物理世界中的實體(tǐ),通(tōng)過數字化的手段來構建一個數字(zì)世界中一模一樣(yàng)的實體,以模擬其在現(xiàn)實環境中的行為,並對過去和現(xiàn)在的行為或流(liú)程進行動態呈現,有效反映係統運行情況,從而對不可預(yù)測的情況進行(háng)更加真實和全麵的檢測。
數字孿生( Digital Twin) 的概念最(zuì)早(zǎo)可追溯(sù)到2003 年,美國密歇根大學的 Michael Grieves 教(jiāo)授(shòu)在其 PLM( 產品生命周期管理) 課程上提出“與物理產品等價(jià)的虛擬數字化表達(dá)”的概念。受限於當(dāng)時的數據采集技術、數字化描述技術、計算機性(xìng)能(néng)以(yǐ)及算(suàn)法,數字孿生概念和模型在 2003 年提出時並沒有引起國內外(wài)學者們的重視。2011 年後,數字(zì)孿生迎來了新的(de)發展(zhǎn)契機。2011 年(nián),數(shù)字孿生( Digital Twin)一(yī)詞(cí)由美國空軍研究實驗室(shì)( AFRL,Air Force Re-search Laboratory) 提出並希望利用數字孿生來解決戰鬥機機體( Airframe) 的維護問題。
數字孿生近期得到了廣泛關(guān)注。全球最具權威的 IT 研究(jiū)與顧問谘詢公司 Gartner 連續兩年( 2016年和 2017 年) 將數字孿生列為當年十大戰略科技(jì)發(fā)展(zhǎn)趨勢之一。世界最大的武器生產商洛克(kè)希德馬丁公司(sī)於 2017 年(nián) 11 月將數字孿生(shēng)列為未(wèi)來國防和航天工業 6 大頂尖技術之首; 2017 年 12 月 8 日中(zhōng)國(guó)科協智能製造學術聯合體在世(shì)界智能(néng)製造大會上將數字孿生列為(wéi)世界智能製造十大科技進展之一。
五軸聯(lián)動編程是在 NX/CATIA/Pro Engineer 等加工軟件中進行(háng)刀路軌跡規劃並輸出刀軌文件。在刀(dāo)軌數據中,包含 3 個相對於工件坐標係的 X、Y、Z坐標值(zhí)和 3 個 I、J、K 刀軸矢量。其中,坐標值表(biǎo)達了虛擬刀尖相對於工件坐標係的位(wèi)置,刀軸矢量表達了刀(dāo)軸相(xiàng)對於工件坐標係的方向,這 6 個數據可以確定加工軌跡。但在機床坐標係中,機床所參照的坐標有 5 個,即 X、Y、Z 三個坐標值和 A、B、C 之中(zhōng)任(rèn)意兩個轉角。因此,五軸坐標變換的實質是(shì)將刀軌數據的坐標值和刀軸(zhóu)矢量轉(zhuǎn)換為機床坐標係的坐標值和(hé)轉角值。
2、五軸聯動設備的數字化設計
2. 1 基於(yú)數字孿生的五軸聯動坐標轉換
現在的五軸(zhóu)坐標轉換流(liú)程是(shì)根據設備(bèi)運動特點來確定設備的運(yùn)動(dòng)鏈,計算各(gè)個環節的變換矩(jǔ)陣,建立方程進行求(qiú)解,得到不(bú)同坐標係轉換之後的坐標點。但該方法計算繁瑣且容易出(chū)錯。基於數字孿生的五軸聯動坐標轉換思路(lù)如下: 建立五軸聯動設備的三維數字模型(xíng),該模型應包含每個(gè)機械零(líng)件的外形(xíng)尺(chǐ)寸、幾何公差及裝配位置關(guān)係(xì)等(děng); 在數(shù)字仿真模型中添(tiān)加運動(dòng)副,確保(bǎo)仿真模型與物理模型有相同的運動關係; 根(gēn)據五(wǔ)軸聯動(dòng)設備的(de)真實(shí)坐標零點來確定(dìng)三維數字模(mó)型的坐標零點。這種(zhǒng)方法中(zhōng),設定數字模型中各部件坐標軸位(wèi)置關係的過程就是實施(shī)坐標轉換的過程,因此,運行仿真過程即可得到轉換後的坐標點。
2. 2 機械結(jié)構三(sān)維建模
五軸數控(kòng)機床一般存在 3 個線(xiàn)性運動軸(zhóu)和 2 個旋轉 運 動 軸。兩 旋 轉 軸 位 置 不 同,結 構 千 差 萬別。本文以 X、Y、Z、A、B 軸機床為例,開展(zhǎn)基於數字孿生技術的五軸(zhóu)聯動(dòng)坐(zuò)標轉換技術研究。如圖1 所示(shì),設備由沿著 X、Y、Z 三個方向移動並平行於(yú)X 軸轉動的 A 軸以及(jí)平行於 Y 軸擺動的 B 軸組成。A 軸的運動範圍為(wéi) 0° ~ 360°,B 軸的運動範(fàn)圍為- 90° ~ + 90°。
2. 3 創建 Sims cape 仿真模型
Simscape 是由 MathWorks 公司推(tuī)出的一種基於物理模型(xíng)的綜(zōng)合建模平(píng)台(tái),現已廣泛用於機械(xiè)、液壓、電(diàn)子電力(lì)行業(yè)建模。Simscape 采用物理網絡的方法(fǎ)進行模型構建,模塊相當於物理元器件,連接線相當於可用於能量傳遞的物理連接,因此更接近於真實的物(wù)理模型。
Simscape / Multibody 提供適用於 3D 機械係統的多體(tǐ)仿真環境(jìng),可以使用表示剛體、關節、約束、力元件和傳感器的(de)模(mó)塊對多體係統進行建(jiàn)模。通過Simscape,可以基於物理連接直接相連模塊框圖來建立物(wù)理組件模型。
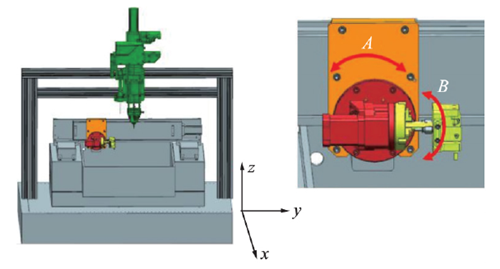
圖 1 NX 中創建的設備三維模型
本文利用 Simscape Multibody 模塊建(jiàn)立了五軸聯動(dòng)設備的(de)模型( 見圖 2) 。其中,Rigid Transformblock 為類似於坐標變換的剛性變(biàn)換模塊,可以對左右兩個端口的 frame 進行旋轉和平移變換。RigidTransform block 是定向的,有 B 和 F 兩個端口,且 B和 F 總是相對的,即 B 是變換前的坐(zuò)標係,F 是變換後的坐標係。旋轉變換包含與(yǔ)軸對齊( Aligned Ax-es) 、對軸的角度旋轉 ( Standard Axis) 、任意軸旋轉( Arbitrary Axis) 、旋轉序列( Rotation Sequences) 和旋轉矩陣( Rotation Matrices) 選項,見圖 3a; 平(píng)移變換包含笛卡爾(ěr)坐標或圓柱坐標係下的向量(liàng)偏移以及沿標準軸的位移(yí)偏移,見圖 3b。如果旋轉和平移均為 None,那麽這兩個 frame 在空間上重(chóng)合,相當(dāng)於(yú)用鏈接線直接將兩(liǎng)個 frame 連接在一起,即一個(gè)沒有剛性變換的 block。
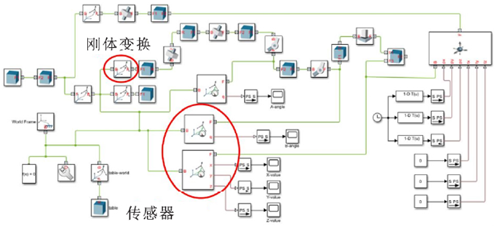
圖 2 Simscape Multibody 中五(wǔ)軸聯動設備模型
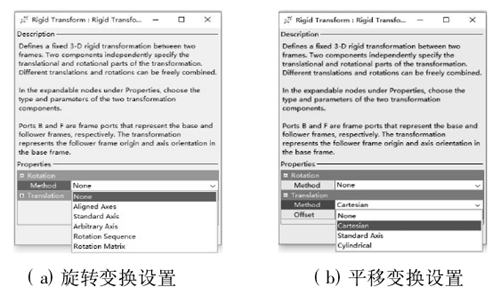
圖 3 剛性變換(huàn)模塊設置(zhì)
Transform Sensor block 可以測量兩個剛體或兩個坐標係(xì)之間位置關係。測量時,B 口連接基坐標係,F 口連接想要測量的坐標係,見圖 4。搭建好的(de)設(shè)備三維模型(xíng)見圖 5。
2. 4 坐標(biāo)零點擬合
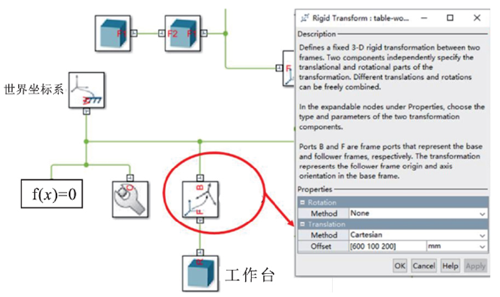
根據五軸聯動設備的(de)實(shí)際坐標零點,設定仿真模型的坐標零點,並與世界坐標係( World Frame) 相連接(jiē),確保數字孿生模型與(yǔ)物(wù)理設備的(de)高度一致性。根據模型與世(shì)界坐標係的(de)連(lián)接(jiē)關係確定虛擬模型的坐標零點,見(jiàn)圖 6。
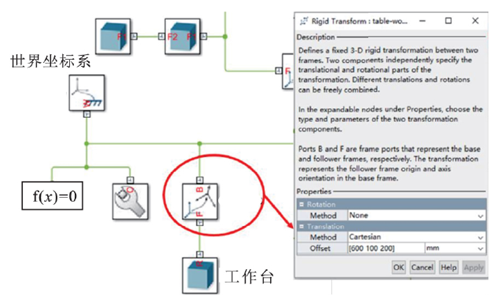
圖 6 坐標零點擬合
3、五軸聯動運動仿(fǎng)真
為保證仿真模型與物理設備的高度一致性,需將物理設備(bèi)的實測誤(wù)差補償到仿真模型。
取工 件 坐 標 係 中 坐 標 點 ( - 33. 5,25. 7,- 4. 3) ,該點在曲麵上(shàng)的法向矢(shǐ)量為 ( - 0. 4281,0. 0045, - 0. 9038) 。在機床加工過程中,由於(yú)機床主軸為 Z 軸,所(suǒ)以需要通過機床提供 A、B 兩個方向的旋(xuán)轉運動,將工件上該坐標點的法向矢量旋轉到與 Z 軸平行。在仿(fǎng)真模(mó)型中,以工(gōng)件的運動(dòng)軌跡(jì)為輸入(rù),運用逆向運動學求解,測量 A、B 軸的(de)轉角與旋轉之後的 X、Y、Z 坐標(biāo)值,見(jiàn)圖 7。仿真後,X =2. 596,Y = - 112. 582,Z = 56. 975,A = 0. 28°,B =- 89. 4°。
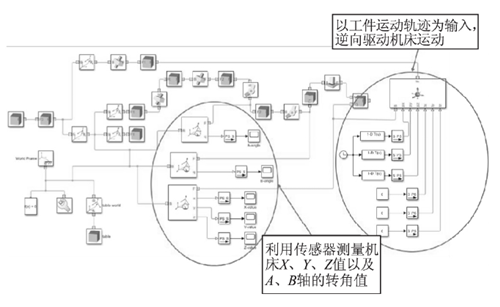
圖 7 運動仿真模型
4、仿真結果驗證
為了(le)驗證仿真結果是否(fǒu)正確,可(kě)利用公式計算對仿(fǎng)真結果進行驗證(zhèng)。根(gēn)據設備的運動鏈,建立機床坐標係 Om、工(gōng)件坐標係 Ow以(yǐ)及旋轉坐標係 Oa之間的(de)關係,見圖 8。
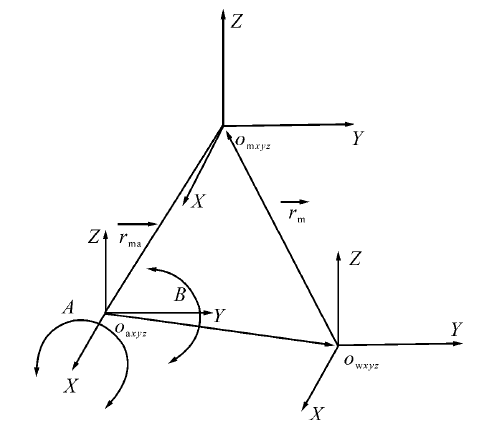
圖 8 坐標係位置矢量關係
在工件坐(zuò)標係中取曲麵坐(zuò)標( - 33. 5,25. 7,- 4. 3 ) ,曲 麵 在 該(gāi) 點 的 單 位 法 向 矢 量 r =( - 0. 4281,0. 0045,- 0. 9038) 。由於(yú)機床主軸為 Z軸,因此,必須使 r 與 Z 軸重合才能加工(gōng)該點。為此(cǐ),在機床(chuáng)提供 A、B 兩種旋轉運動的前提下,工件要繞 B 軸和 A 軸做兩(liǎng)次旋轉(zhuǎn)才能滿足要求。計算旋轉後的坐標點(diǎn)就是計算這兩次旋轉的角度以及旋轉後的 X、Y、Z 坐標值(zhí)。
工件旋轉之前應先平移到旋轉坐標係下( A 軸與(yǔ) B 軸的交點處) 。平移變換(huàn)矩陣為[- 24,- 138,7. 5],平移後的坐標值為( - 57. 5,- 112. 3,3. 2) 。
繞 B 軸旋轉 θ 角度,θ = arctanij= - 89. 3977°。則有
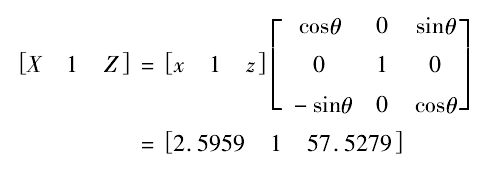
旋轉後 Y、J 值保持不變,I = 0,K = 1 - J槡2=0. 99998。
繞 A 軸的旋轉角度 α = arctanik= 0. 2821°,則(zé)有
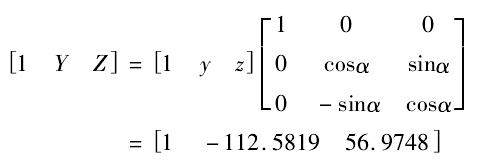
旋轉後 X、I 值保持不變,J = 0,K = 1。
因此,旋轉變換之後的坐標變為 X = 2. 5959,Y = - 112. 5819,Z = 56. 9748,I = 0,J = 0,K = 1。
上述計(jì)算結果驗證了(le)仿真模型的正確性。
5、結語
本(běn)文基於(yú)數字孿生的技術原理,在 NX 軟件中對五(wǔ)軸設(shè)備進行了精準建模,將模型導入 Simscape /Multibody 中進行了多剛體物理建模,按照設備實際情況添加運(yùn)動副,並設定坐標零點,保證了仿真模(mó)型與(yǔ)設(shè)備的高度一致性。利用仿(fǎng)真模型開展了坐標(biāo)變換仿真(zhēn),並用傳統的公式計算對仿真結果進行了驗證分析。結(jié)果(guǒ)表明,公式計算與(yǔ)仿真分析的結果一致,證明了利用虛擬模型開展坐標變換的可行性。
目前,國內外基於數(shù)字孿生技術開展坐標變換的案例很(hěn)少。本文驗證了這一技術思(sī)路的可行性,有利於數(shù)字孿(luán)生技術的推廣和應用。同時,該項技術可為基於數字(zì)孿生技術(shù)開展後處理編(biān)程與(yǔ)仿真提供技術基礎。
參考文獻
[1]陶飛,劉蔚然,劉檢華(huá). 數字孿生及其應(yīng)用探索[J]. 計算機集成製(zhì)造係統,2018,24( 1) : 1 - 18.
[2]Qinglin Qi,Fei Tao,Tianliang Hu,et al. Enabling technolo-gies and tools for digital twin[J]. Journalof ManufacturingSystems. Available online 29 October 2019.
[3]Qianzhe Qiao,Jinjiang Wang,Lunkuan Ye,et al. Digital twin for machining tool condition prediction[C]. 52nd CIRP Con-ference on Manufacturing Systems,Procedia CIRP,2019,81:1388 - 1393.
[4]Yuqian Lu,Chao Liu,Kevin I-Kai Wang,et al. Digital twin-driven smart manufacturing: connotation,reference model,applications and research issues[J]. Robotics and Computer Integrated Manufacturing,2020,61: 101837.
[5]Chenyuan Zhang,Wenjun Xu,Jiayi Liu,et al. A reconfigu-rable modeling approach for digital twin based manufacturing system[J]. Procedia CIRP 2019,83: 118 - 125.
[6]鄭惠強,郝一(yī)舒,李愛紅(hóng). 五(wǔ)軸(zhóu)銑削加工中心坐標轉換數學模型的建立(lì)及應用[J]. 計算機應用(yòng)與 IT 技術. 2004,25( 1) : 27 - 29.
[7]Mihai Crenganis,Melania Tera,Cristina Biris,et al. Dynamic analysis of a 7 DOF robot using fuzzy logic for inverse kine-matics problem[J].ProcediaComputer Science,2019,162:298 - 306.
[8]王安邦,孫文(wén)彬,段國林. 基(jī)於數字(zì)孿(luán)生與深度學習技術的(de)製(zhì)造(zào)加工設備智能化方法研究[J]. 工程設計學報,2019,26( 6) : 1 - 9.
[9]杜澎,董佑浩,苗盛. 非正交五軸聯動數控機床後置處理算(suàn)法開(kāi)發[J]. 數控技術,2019( 12) : 160 - 164.
[10]呂強. UCP710 五(wǔ)軸機床中的坐標轉(zhuǎn)換[J]. CAD/CAM與製造業信(xìn)息化,2003( 4) : 87 - 94.
[11]林蓮. 基於 MATLAB/Simulink/Sim Scape 的無刷直流電機的建模與仿真(zhēn)[J]. 裝備製造技術,2018 ( 8) : 138 -141.
第一作者(zhě): 秦秀,碩士(shì),工(gōng)程師,中國科學院寧波材料技術與工程研究所,浙江省寧波市 315201
通信作者: 張文武,研究員,中國科學院寧波材(cái)料技(jì)術與工程研究所(suǒ),浙江省寧波市(shì) 315201
作(zuò)者: 秦秀,張文武,茹浩磊,張天潤,王吉
來源: 中國科學院寧(níng)波材料技術與工(gōng)程研究所; 浙江省航空發動機極端製造技術研究重點實驗室
投稿箱:
如果(guǒ)您有機床行業、企業相關新聞稿件發表,或進(jìn)行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果(guǒ)您有機床行業、企業相關新聞稿件發表,或進(jìn)行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
查")
行業數據
| 更多
- 2024年(nián)11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年(nián)11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數(shù)據
- 2024年11月 新能源汽車(chē)產量數據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月 軸承出口情況(kuàng)
- 2024年10月 分地區金屬切削機床產量數(shù)據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用(yòng)車(轎車)產量(liàng)數據
博文選萃(cuì)
| 更多