


一種五軸工具磨床通用後置求解方法
2018-6-15 來源:西(xī)南交通大學機械土程學院 作者:李樂,程雪(xuě)鋒(fēng),尹福蘭(lán),楊欣雨,江磊,丁國
摘要: 針對五軸數(shù)控工具磨床砂輪初(chū)始軸向、工(gōng)件坐標係方向相對於機床坐標係不統一導致的後置求解問題,通過研(yán)究砂輪初始軸向與磨(mó)床拓撲結(jié)構之間的關係,提出一種基於磨床類型(xíng)變換(huàn)的求解方法。該方法將其他類型磨床的後置求解以坐標係旋轉的方式變換到 6 種砂輪初始軸(zhóu)向為 Z 軸的磨床上進行(háng),從而減少了求解類型。通過(guò)定(dìng)義工(gōng)件坐標係方向角,提出一(yī)種刀位數據預處理的求(qiú)解方法,實現工件坐標係不同的情況下機床運動量的統一求解,提高了數控程序在不同磨床上的可移植性。基於該算法,以 C#為工具開發了一套五軸磨床通用後置處理軟件,並進行了仿真試驗,驗證了算法的可行性(xìng)和高(gāo)效性。
關(guān)鍵詞: 後置處理; 數(shù)控程序; 五軸工具磨床; 坐標變換
0、引言
隨著數控加工技術突飛猛進的發展,五軸數控工具磨床已經被廣發應用於複雜刀具的磨削(xuē)加工當中。其數控編程(chéng)中將刀位數據根據(jù)磨(mó)床結構轉化為磨床各個軸運動量,生成數控代碼的後置處理是(shì)連接編程軟件和加工設備的重要橋(qiáo)梁。五軸工(gōng)具磨床(chuáng)與五軸數控銑床類(lèi)似,結構複雜,擁(yōng)有二個平動軸和兩個轉動軸,後(hòu)置(zhì)求解過程也類似,而後者在後置處(chù)理(lǐ)方(fāng)而的研究(jiū)已(yǐ)經較為成熟。
在五(wǔ)軸數控機(jī)床後置處理的研究中,Lee等用齊次矩陣推導了3種基本類(lèi)型五軸機(jī)床的角度求(qiú)解方法。She等通過建立機床運動變(biàn)換(huàn)模型推導出多種正交和非正交五軸機床後置處理算法。鄭默等通過研究機床形狀創成函數給出了五軸機床後置處理通用的數學表達式閉。JUNG等、Tang、周續等分別對某種結構的非正交雙轉台機(jī)床的後置處理進(jìn)行了研究。唐清春等基於逆運動(dòng)學原理研究了國產雙擺頭機床的(de)後置處理方法岡。孫凱等基於矢量(liàng)鏈方(fāng)法研究了新型(xíng)五軸混聯機床的後置處理方(fāng)法回。上述研究主(zhǔ)要針(zhēn)對單一類型機床或者通用五軸數控銑床,在應(yīng)用到工(gōng)具磨床的後置處理時需要考慮以卜(bo)兩個問題。
(1)考慮砂輪初始軸(zhóu)向和(hé)磨床結構之間的關係,從而能夠對多種砂輪初始軸向的磨床進行後置求解(jiě)。
(2)為了使同一個刀軌文件能夠在不(bú)同磨床上使用,方便程序(xù)移植(zhí),需要在後置處理中考慮工件坐(zuò)標係與機(jī)床坐標係不同(tóng)向的問題。
本文綜合考慮以上兩個問題,通過研究各類磨床之間的結構關係,提出了磨床類型變換和刀位預處理的求解算法,提高了五軸工具磨床(chuáng)後置處理的通用性(xìng)和可移植性。根據該算法(fǎ)開發的後置處理軟件(jiàn),成功進行了仿真驗證並應用於成都(dōu)大佑創軟科技(jì)有限公司自主研發的EcutterSim數字化(huà)加工仿真軟件當中。
1、磨床結構和運動變換矩陣
五軸工具磨床有5個運動軸,它們之間的位置關係和類型選擇導致磨床結構多種多樣,但是按照砂輪和工件的運動方式(shì)可以分為二種類型:工件轉動(dòng)砂輪平動型、工件平(píng)動砂輪轉(zhuǎn)動型和工(gōng)件轉動砂輪(lún)轉動型。本文用A一(yī)B (Z)表示(shì)砂輪初始軸向為Z軸,工件夾頭聯動轉軸為A轉軸,砂輪磨頭聯動轉軸為B轉軸的磨床。
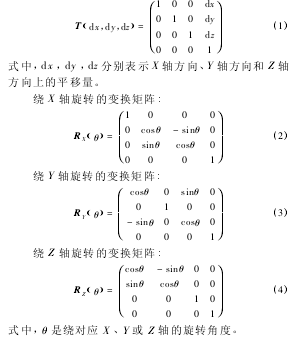
齊次變換矩(jǔ)陣容易處理多坐標係變換中的運動變換,方便建立磨床運動數(shù)學模型(xíng)。通過分析磨床拓撲模型,以齊次變換矩陣建(jiàn)立運動方程的形式進行運(yùn)動量求解,所用到(dào)的變換矩陣有(yǒu)4種。
因為3種平移變換矩(jǔ)陣(X , Y,Z三(sān)個方向)之間的順序不影響計(jì)算(suàn)結果,所以可以用統一的平移變推矩陣表示:


圖(tú)1坐(zuò)標係(xì)設置
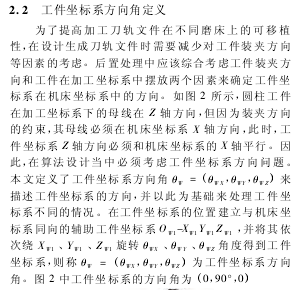
圖2 工件(jiàn)坐標係和機床坐標係為方向不同
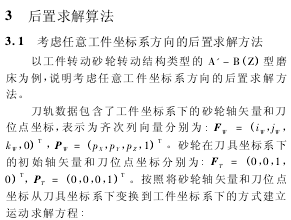
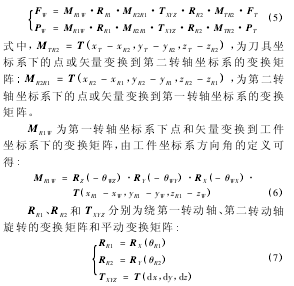

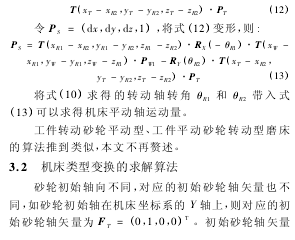
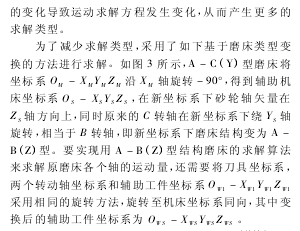

圖3 坐標係旋轉轉方式


按照轉動(dòng)軸位置、類(lèi)型和砂輪初始軸向分類,可以將所(suǒ)有磨床分為36個類型(xíng)(每種砂輪(lún)初始軸矢量有12種類型。本文(wén)選擇砂輪初始軸向為Z軸的(de)6種磨床作為基(jī)木類型,根據上而磨床類型變換的方法,將其他類型磨床的後置求解轉換到6種基木類(lèi)型磨床(chuáng)上進(jìn)行。其他30種類型磨床按照變換到基本類型(xíng)所進行的坐(zuò)標係旋轉方式可分為5組,同一組類型變換

4、算法驗證
基於上述求解算法,在vs2olo中以c#語言開發了一套後置處理軟件,並集成到了EcutterSim數字化加工仿真軟件當中(zhōng)。該軟件可以對砂輪初始軸向、工件坐標係方向進行設置,同時考慮各個軸行程限製等因素,滿足各種(zhǒng)五軸磨床後置求解需求,其參數設置界麵(miàn)如圖4所示。
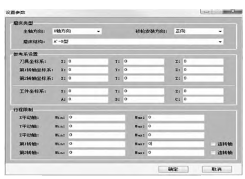
圖4 軟(ruǎn)件(jiàn)參數設置界麵
以安卡某(mǒu)型(xíng)磨床為原型進行刀具磨削加工後(hòu)置(zhì)求(qiú)解的算法驗證。該磨床為 A' - C( Y) 型五軸磨床,其毛坯需要橫向裝夾,工件坐標係與機床坐標係方向不同,同時砂輪初(chū)始軸向在 Y 軸上,能夠很好的驗證算法的正確(què)性。圖 5 為三齒立銑刀在該磨床上磨削加工後置處理的主要參數和求解結果。
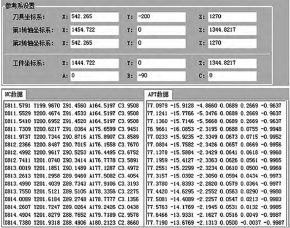
圖 5 後(hòu)置處理(lǐ)主(zhǔ)要參數與結果
求解(jiě)得到的 NC 文(wén)件,在數控加工仿真軟件 VERI-CUT 中建立磨(mó)床模型進行仿真,結果能夠精確加工,很好(hǎo)的證明該算法在處理砂(shā)輪初(chū)始軸向,工件坐標係與機床坐標係不同(tóng)向等問題的正(zhèng)確性。加工仿真結果如圖 6 所示(shì)。
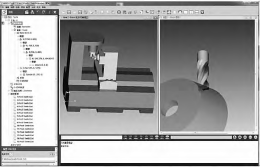
圖 6 刀具磨削加工(gōng)仿真
5、 結論
(1) 定義工件坐標係(xì)方向角,提出刀位數據預處(chù)理的後置求解方法,實現工(gōng)件坐標係不同的情況下磨床運動量的(de)統一求解,提高了數控(kòng)程序的可移(yí)植性(xìng)。
(2) 以建立輔助機床坐標係的方式對機床類型進(jìn)行變換,從而(ér)將所(suǒ)有(yǒu)機床類型的角度求解方法縮小到2 種,將平動(dòng)量的求解方(fāng)法縮小到 6 種(zhǒng)。
(3) 設(shè)計了一套工具磨床後置(zhì)處理(lǐ)軟件,並進行了仿真(zhēn)驗證(zhèng),結果表(biǎo)明本文提出的算法很好地解(jiě)決了具磨床的後(hòu)置(zhì)處理問題。
投稿箱(xiāng):
如果您有機(jī)床行業、企業相關(guān)新聞稿件發表,或進行(háng)資(zī)訊合(hé)作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業、企業相關(guān)新聞稿件發表,或進行(háng)資(zī)訊合(hé)作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視(shì)點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬(shǔ)切削機床產量(liàng)數據
- 2024年(nián)11月 軸承(chéng)出口情況
- 2024年11月 基本型乘用車(轎(jiào)車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分地區金屬切削機床產(chǎn)量數據
- 2024年10月 金(jīn)屬切削機床產量數據(jù)
- 2024年9月 新能源汽車銷量情況
- 2024年8月(yuè) 新能源汽(qì)車產量數(shù)據
- 2028年8月 基本型乘用車(轎(jiào)車)產量數據