


五坐標數控後置處理算法研究
2014-5-17 來(lái)源:陝(shǎn)西鼓風機(集團(tuán))有限公司 作者:徐小查
摘要:從數控(kòng)編程的後處理任務出發,以特定五坐標(biāo)機床(chuáng)! ( 為研究對象,以機床編程手冊為參考,以刀具路徑模擬軟件)*+,- 為(wéi)研(yán)究及模擬工具(jù),闡述了五坐標數控(kòng)機床控製係統./00 的數控程序坐標計算方法(fǎ)。
1、後置處理概(gài)述
數控機床(chuáng)種類繁多,要想開發通用的後處理軟件是不(bú)可能的,也是沒有必要的。可根據現有多軸機床的(de)特點,開發性能可靠,使(shǐ)用(yòng)方便的專用後處理(lǐ)軟件。數控機床的所有(yǒu)運動和操作都是執(zhí)行特定的數控指令的結果(guǒ),完成一個零件的數(shù)控加工一般需要連續執(zhí)行一連串的數控指令,即數控程序(xù)。在自動編程中,一般先計算出刀位數據文件(@B),它由點坐標及其法矢量等組成,它還不是數控程(chéng)序。還需要(yào)進一步把刀位源文件轉換成指定機床能執行的數控程序,輸入到數控係統,才能進行零件的數控(kòng)加工。
在數控編程(chéng)中,把刀(dāo)位數據的計算過程稱為前置(zhì)處理。把(bǎ)刀位數據文件(jiàn)轉換成指定(dìng)機床(chuáng)能執行的數控程序的過程稱為後(hòu)置處理( POST PROCESSING)。
2、後置處理(lǐ)的主要(yào)任務
後置處理的任務就是把刀位文件轉換成指定數控機床能執行的(de)數控程序。通常多軸後置處理(lǐ)是根(gēn)據具(jù)體(tǐ)機床運動結(jié)構和其數控係統能夠接受的(de)控製指令格式,將前置處理(lǐ)中計算的刀位數據變成(chéng)機床各軸(zhóu)的運動數據(jù),並按其控製指令格式轉換成為數控機床的加工程序。
後置(zhì)處理過程原(yuán)則上是解釋執行,即每讀出刀位源文件中的一(yī)個完整記錄(行),便分(fèn)析該記錄類型,根(gēn)據記錄類型確定是進行坐標變換還是進行(háng)文件代碼轉換,然後根據所選數控機床進行坐(zuò)標變換或者文件代碼(mǎ)轉換,生成一個完整的數(shù)控程(chéng)序段,並寫到數控程序文件中去,直到刀位源文件結(jié)束。"
3、後置處(chù)理算法研究
一般來說,五軸聯動是指數控機(jī)床的X、Y、Z 三個移動坐標和繞X、Y、Z 軸旋(xuán)轉的三個坐標A、B、C中的任(rèn)意兩個坐標的線性插補運(yùn)動(dòng)。
五軸機床中的五個坐標通常是由三個移(yí)動坐標X、Y、Z 與三個轉動坐標A、B、C 中的任意兩個組成(chéng)。轉動坐(zuò)標A、B、C 的運(yùn)動(dòng)可由回(huí)轉工作台(tái)的轉動或刀具的擺動來實現。不同類型的數控機床,其運動方式不一致,故其後置處理算法也各(gè)不(bú)相同。
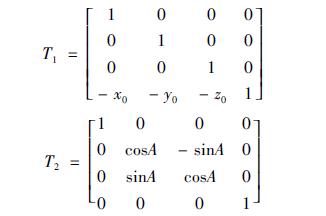
4、以下介紹我公司(sī)五坐標數控機床C. B.Ferran 的控製係統CNC E500 的數(shù)控程序(xù)的坐標處理算法。
後處理算法工作(zuò)的開展以機床編程手(shǒu)冊為參考,以刀具路徑模擬軟件PLO3D 為研究及模擬工具。 是C. B.Ferran 公司開發的一種工(gōng)具軟件,用於模擬演示、驗證和修改符合ISO標準的數控銑程序。它在屏幕上顯示刀具中心的路徑,還可以顯示刀軸方向和(hé)程序原點(diǎn)坐標,在五坐標模(mó)擬加工中不僅顯示程(chéng)序坐標而且顯示其對應的法矢量(liàng)。
本(běn)文以PLO3D 為工具,研究了某機床後處(chù)理程(chéng)序的算法。首(shǒu)先研究了機床五個坐標的確定方法,然後研究了已有程序中的坐標關係,最(zuì)後對已有的刀位數據進行後處理生成了五軸加(jiā)工數控程序。
C.B.Ferrari機床(chuáng)的兩個轉動坐標是:繞x軸的轉台坐標和繞Y軸的擺頭坐(zuò)標(biāo),在該機床的控製係統中,其相應旋轉運動字地址分別是A 和C。根據機床特點,機床五(wǔ)個(gè)坐(zuò)標運動字地址的(de)順序為XYZAC。
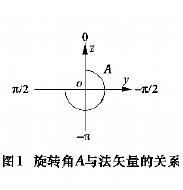
C.B.Ferrari的C轉角的編程中心在刀尖點或刀心點上,對三個平動坐標的數值沒有影響(xiǎng),C角的零點與(yǔ)Z軸重合。根據該機床的特點,設(shè)擺角C 坐(zuò)標中心在刀具中心,繞Y軸順時針轉動角度值為正,逆時針角度為負;轉角A 在(zài)其轉動平麵內的(de)角度如(rú)圖A 所示。
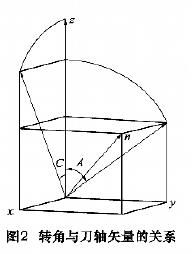
經分析得到機床A、C 轉角與刀軸矢量的關係如(rú)圖B所示,從(cóng)圖中,得出A、C 轉角(jiǎo)的坐標計算公式如下:由圖A、B 得到A 轉角與法矢量的關係,其計算公式為:

至此,數控加工程序的五個運動坐標全部(bù)計算出來,再按照該控製(zhì)係統(tǒng)程序代碼格(gé)式將其插入程序中,就是數控程序了。注意旋轉擺頭雖不影響X1、Y1值,但與之(zhī)相關的實際運動坐標將隨其繞(rào)刀尖點的轉動(dòng)而產生相(xiàng)應的平移。" 算法驗證把一個葉片(piàn)表(biǎo)麵的環(huán)形刀位數據用上述方法轉換成數控程序,在PLO3D得到圖3所示的圖形。
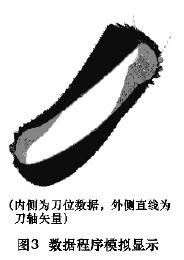
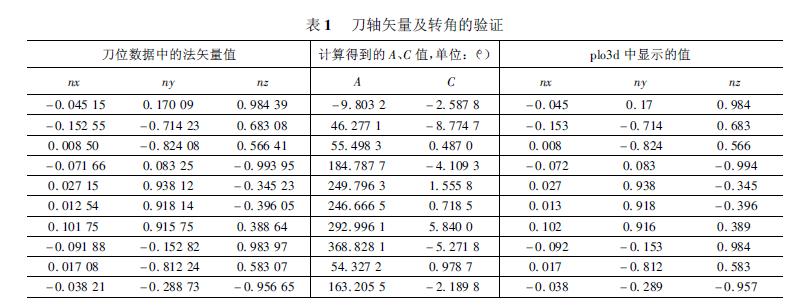
表1的數據進一步證明了刀軸矢量和轉角關係算法的正(zhèng)確性。數據來(lái)源於(yú)經過驗證的C.B.Ferrari程序中的數據,計算結果與軟件中顯(xiǎn)示的結(jié)果基本吻合。
5 結語(yǔ)
在五坐標加工中,角度坐標是以刀軸矢量和機床轉角關係為(wéi)依據計算得到(dào)的,是進一步計算三個平動坐標位置的基礎。根據本文總結出的關係,將計算得到的刀位數(shù)據(包括位置及其矢量)換算成加工坐標並進而(ér)生成加(jiā)工程(chéng)序,用PLO3D軟件進行刀具(jù)模擬,得到了正確的結果。
投稿箱:
如果您有機(jī)床行業、企業相(xiàng)關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業、企業相(xiàng)關新聞稿件發表,或進行資(zī)訊合作,歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
更多(duō)相關(guān)信息

業界視點
| 更多(duō)

行業(yè)數(shù)據
| 更多
- 2024年11月 金屬切削機床產量(liàng)數據
- 2024年11月 分地(dì)區金屬(shǔ)切削機床產量數據
- 2024年(nián)11月(yuè) 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源(yuán)汽車產量數(shù)據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月 軸承出(chū)口情況
- 2024年10月 分地區金(jīn)屬切削機床產量數據
- 2024年10月 金屬切削機床產(chǎn)量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量(liàng)數據
- 2028年(nián)8月 基(jī)本型乘用車(轎車)產量數(shù)據
博文選萃
| 更多
- 機械加工過程圖示
- 判斷一台加工(gōng)中心(xīn)精度的幾種辦法
- 中走絲線切割機床(chuáng)的發展趨勢
- 國產數控係統和數控機床何去何(hé)從?
- 中國的技術工人都去哪裏了?
- 機械老(lǎo)板做了十多年,為何還是(shì)小作坊?
- 機械行業最(zuì)新自殺性(xìng)營銷,害人害己!不倒閉(bì)才
- 製造業大(dà)逃亡
- 智能時代(dài),少談點智造,多談點製造
- 現實麵前(qián),國人沉默。製造業的騰飛,要(yào)從機床
- 一文搞懂(dǒng)數控車(chē)床加工刀具補償功能
- 車床鑽孔攻螺紋加工方法及(jí)工裝設(shè)計
- 傳統鑽(zuàn)削與螺旋銑孔(kǒng)加工工藝的區別