



一(yī)種全方位護理(lǐ)移動機器人的結構設計與運動學分(fèn)析
2016-9-22 來源: 天津工業大(dà)學機(jī)械工程學院 等 作者: 貟今天 武愛華(huá) 桑宏強
摘要: 針對(duì)需要護理的環境背景(jǐng)及機器人(rén)的作(zuò)業要求, 提出(chū)了一種全方位護(hù)理移動機器人的設計方法, 運用solidworks 進行了各部分結構初期設計,並(bìng)在ADAMS 中對該虛擬樣機進行了動力學仿真(zhēn),完成了對選型的電機進行了驗證;利用D-H 方法建立了機器人上肢單(dān)臂運動學模型(xíng),得(dé)到了機(jī)器(qì)人的運動學正逆解;通過對上(shàng)肢雙臂建立兩杆避碰模型,提出了(le)兩(liǎng)種相碰(pèng)的檢驗條件,選出了最佳檢測避碰方案,解決了約束條(tiáo)件下雙臂的逆運動學問題;在Matlab 環境下,利用蒙特卡羅法計算出工作空間,為(wéi)確定機器人構形、參數和杆長(zhǎng)的優化提供了依據(jù);基於移動機器人在特定環境中的運(yùn)行穩定性(xìng)、應用範(fàn)圍、承載能(néng)力等特點,對機器人下肢移動方(fāng)式進(jìn)行了優(yōu)化選擇(zé),采用全方位移動的完整約束Mecanum 輪結構並建立下肢運動學模型,通過對其逆運動學速度雅可比矩陣秩的計算,結合具(jù)體結構的分析,優(yōu)選出(chū)四輪全方位運動係統的最佳結構(gòu)布局形式,提高了機器人運動過程中的穩定性.
關鍵詞: 全方位護理;護理機器(qì)人;移動機器人;結構設(shè)計; 運動學分析; 雙臂逆解分析; 工作空間
日本護理移動機器(qì)人技術一直處於世(shì)界領先地位,2010 年,日本研製出了護理機器人RIBA,它的鏈路長度、關節配置和可(kě)移動(dòng)關節的範圍由計算機(jī)執(zhí)行模擬(nǐ)抱人的(de)數據和(hé)基於經驗結合得到,采用了耦合驅動(dòng)器的機製, 提(tí)高了(le)REBA 的負重性能和抱(bào)取能(néng)力,不再僅僅(jǐn)局限於輕重量的假人,而能夠真正的抱取真人;2014 年10 月,美國首次將現有(yǒu)雙足機器人進行(háng)結構重組和功能改造,首次運用到對抗埃(āi)博拉病毒當中.中(zhōng)國在護理方麵的移動機器人研究很少,典型的是在2003 年(nián)非典期間研製了一台(tái)取名(míng)為“愛姆”的機器人,身高半米左右,“身手”十分敏捷,該非典(diǎn)機器(qì)人可以代替醫護人員在病區查房,為病人送藥、送飯及運送生活用品等,但是該機器人造(zào)型簡單,沒有手臂,不能完成直接和病人(rén)接觸要求, 比如抱取病人動作. 護(hù)理服務機器人是要融入(rù)人們生活的消費品,其對外觀(guān)造(zào)型、安全性、人機界麵(miàn)等都提出了更高(gāo)的(de)設計要求[2].
鑒於護理移動(dòng)機器人的使用環境是在病房內,空間比較狹窄(zhǎi), 根據作業要(yào)求, 本(běn)文(wén)提出了一種具有5個自由(yóu)度的(de)上肢結構和具有全方位、完整約束性能下肢的機器人,並對其建立數學(xué)模型,求出單臂機器人運動學正逆(nì)解及完成雙臂協調運動時的逆解分析,最後運用蒙特卡羅方法, 做出(chū)機器人運動空間範(fàn)圍圖,根據下肢全方位運動條件,優選出四輪全方位運動係統的最(zuì)佳結構布局形式.
1、機械結構設計
設計此類機器人基本需要4 個步驟[3]:①創建一個設計結(jié)構規(guī)範;②機器人軀幹及下肢設計;③機器人驅動(dòng)選擇;④靈活控製所需要的傳感組件.
根據人體比例,確定了該機器人的外形尺寸[4]:身高1 410 mm,身寬340 mm,上臂長777.36 mm,下臂長300 mm,下肢長860 mm. 不(bú)同國家和地(dì)區的人體比例各不相同,這裏僅以此(cǐ)作為仿人機器人外形尺寸(cùn)的參考,如圖1 所示(shì),結構由頭部、上肢、左右臂、腰部(bù)、下肢組成. 該機器人最突出的優點是具有巨(jù)大的承載能力,滿足本文設定的負載75 kg 的要求. 以下將對各主要部分(fèn)進行分析(xī).
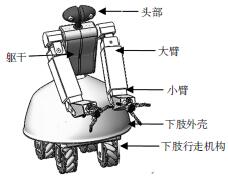
圖1 機器人(rén)整體結構圖
1.1 上肢(zhī)設計
本文機器人上肢體包括腰部、軀幹、頭部及雙臂(bì)4 個部分, 機械結構設計方案采用18DOF 的(de)形式:腰部1 個俯仰自由度,頭部1 個旋轉自由度,單臂4 個自由度(肩部(bù)1 個內外斂自由度、俯仰自由度、肘部和腕部各1個俯仰自由度)[5-7].
(1)考慮到電機(jī)尺(chǐ)寸較大(dà),上臂空間有限,所以(yǐ)將肩部俯仰自(zì)由度驅動的部件放(fàng)置胸腔內,如圖2 所(suǒ)示.
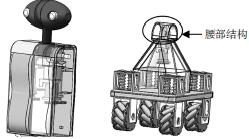
圖2 機器人軀幹和腰部結構圖
(2)上臂部位內部包含2 個小體積的蝸輪蝸杆機構,如圖3 所示(shì).
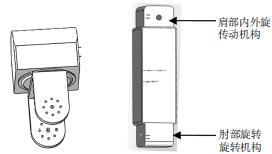
圖3 機器人上臂結構圖
(3)下臂是病(bìng)人與機器人直接接觸的(de)部位, 不僅安(ān)全(quán)性至關重要,而且對舒適性和美觀度提出很高要求[8],腕部俯仰關節由(yóu)靈巧手自帶,如圖4所示.
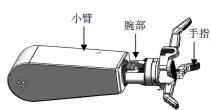
圖4 機器人下臂結構圖
1.2 驅動部分設(shè)計
機器人的驅動方式主要有氣(qì)體傳動、液壓傳(chuán)動和電機驅動,鑒於此機器人的作業環境及要實現抱人要求,在首先必須保(bǎo)證病人的安全前提(tí)下,還(hái)要克服潛在泄露風險和減少技(jì)術上的包(bāo)裝複雜性(xìng)[9],本文傳動部分均采用高緊湊、電動蝸輪蝸杆執行機構(gòu),它(tā)的(de)優勢是:傳動比大,工作時比較平穩,噪聲(shēng)低,結(jié)構緊(jǐn)湊,不工作時可以自鎖, 最重要的的是較大的承載能力,可以滿足本文所設定的負載要求.
本文設計(jì)大、小2 種(zhǒng)蝸輪蝸杆傳(chuán)動機構, 如圖5所示. 二者的主要區別在減速比,一種(圖5 左)是減速比為44 ∶ 1,體積較大、能為肩部旋轉和腰(yāo)部俯仰(yǎng)提供高達900 N·m 的力矩,另一種(圖5 右)是減速比為34 ∶ 1,體積相對較小、能為其他上肢(zhī)(肩部內外旋和小臂)2個自由度提供450 N·m 的力矩,這2 種傳動機(jī)構結構緊(jǐn)湊,滿足使用需求(qiú).
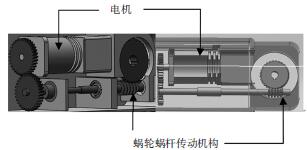
圖5 (大、小(xiǎo))蝸輪蝸杆內部(bù)結構視圖
此次設計的選型大致經過“選型參考—理論估算—仿真驗證”3 個過程,通過對關節負載轉矩的需求來選出可能的電機型號,電機選型(xíng)必須滿足(zú)以下2 個條件:①有效轉矩(jǔ)Mrms 必須要比所選電機的連續轉矩小; ②所選電機的堵(dǔ)轉轉矩要大於所需的峰值轉矩Mmax,綜合考慮,以腰部(如圖6)和肘部(如圖7)關節為例,經理論估算,腰部和肘部力矩(jǔ)需至少分別滿足(zú)910 N·m 和150 N·m, 電機分別選用雄克公司生(shēng)產的PDU70-161和(hé)PDU-101,從仿真驗證的圖中(zhōng)可以(yǐ)看出滿足以上2 個條件(jiàn).
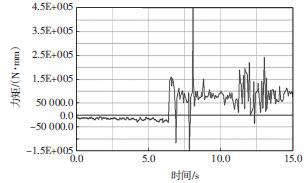
圖6 腰部關節(jiē)力(lì)矩
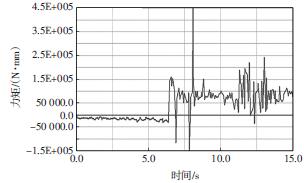
圖7 肘部關節力(lì)矩
1.3 下肢結構設計
機(jī)器人中常見(jiàn)的移動機構[4]有輪(lún)式(shì)、履帶(dài)式(shì)、關節式、複合式,關節式機(jī)構能夠提供最佳的機動(dòng)性能,但其機械及(jí)控製係統很複雜,實施成本太高,本文所討論的是室內環境工作的(de)服(fú)務機器人, 路麵條件好,而且無需特別大(dà)的越障能力,顯然采用輪式機構比履帶機構更(gèng)為合適.
綜(zōng)合因素考慮(lǜ),該護理移動機器人下肢采用全方位(wèi)移動的完整約束Mecanum 輪結構[10-11],所需的安裝空間小、運動非常平穩,承重能力強;根據要求滿足機器人實現Mecanum 四輪係統平麵上3 自由度全方位運動條件,結合係統的驅動性能和可控性要求,優選出四輪全方位運動係統的最佳結構(gòu)布局形式(shì)[4];在保證機(jī)器人在加速的過程中不(bú)會傾倒的前提下,結合底盤全向輪的布局和底盤懸掛等因素, 確定了底盤大(dà)小;由(yóu)於機器人采用4 個全向輪的底盤,在平麵上很難保證4 個點同時著地或(huò)接觸(chù)不好,為避免出現輪子空轉或打滑現象,懸掛設計(jì)也不可缺少,整體設計方案如圖(tú)8 所示.
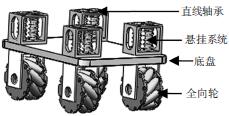
圖8 下肢行走結構圖
2、機器人運動(dòng)學建模
2.1 建立坐標係
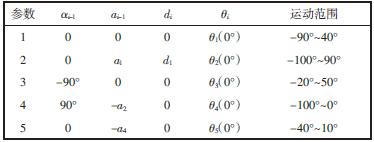
鑒於該護理移(yí)動機器人(rén)下肢為輪式(shì)結構,在運(yùn)動學求解中下肢可作為基坐標係,采用D-H 方法對機器人上肢建立坐標係(考慮肩(jiān)部2 個旋轉軸距離較近,將其按照相交來建(jiàn)係(xì)),如圖9 所示,連杆參數如表1所示. 假設(shè)Ti 為連杆坐標係i 相對於連杆坐標係i-1的齊次變(biàn)換矩陣. 根據表1 的各連杆參數, 可求(qiú)得各杆係(xì)的變換(huàn)矩陣及機器人末端在基礎坐(zuò)標係的位姿矩陣.
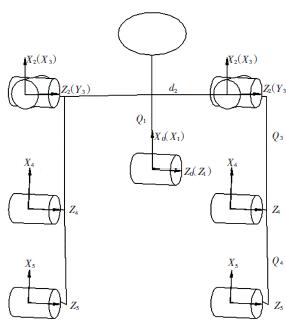
圖9 上肢腰(yāo)部到手腕機構和坐標係簡圖
表(biǎo)1 機器人上(shàng)肢連杆參數表

2.2 單臂正(zhèng)運動學分析
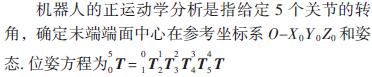
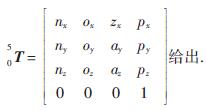
式中左端項表示末端端麵中心的位置和姿態(tài), 右端每個齊次變換矩(jǔ)陣即(jí)
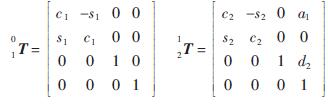
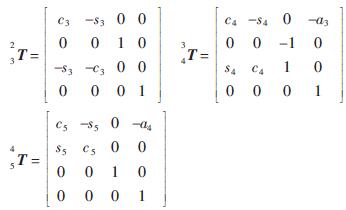
式中: a1、a3、d2為已(yǐ)知的的結構參數(shù),若(ruò)給定3 個關節(jiē)的轉角θ1、θ2、θ3、θ4和θ5, 代入上式就可(kě)直接得出手腕末端關節端麵中心點的位姿,其中:
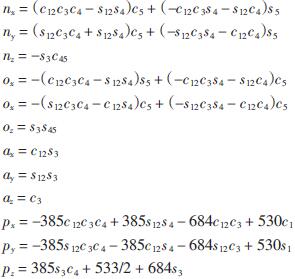
式中:c1 代表cosθ1;s1 代表sinθ1;c12 代表cos(θ1 + θ2);s12代表sin(θ1 + θ2). 以此類推.
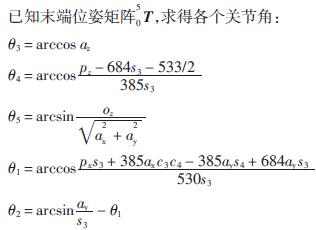
2.3 單臂逆運(yùn)動學分析
執(zhí)行抱取或抓取任務時,目標相對於O-X0Y0Z0坐標係的(de)矢量方位可以(yǐ)經過測量達到,假(jiǎ)設已知此時目標相對於基坐標係的末端位姿. 要確保任務(wù)完成,就需要知道各關(guān)節的(de)角(jiǎo)度值,這是機器人的逆向運動學的求(qiú)解.
2.4 雙臂逆運動學的分析方法
2條機(jī)械臂在同時運動的情(qíng)況下, 則必須考慮2臂的位置約束,使其不發生碰撞,這就需要通過建立兩杆模型,用碰撞的約束條件(jiàn)[13]對分別對求得的運(yùn)動學逆解進行取舍或尋優.
(1)第1 種分析方法. 把左、右臂杆(gǎn)簡化為空間相錯的兩線段LiLi-1和RiRi-1,如圖10 所示(shì). 設此兩(liǎng)杆在基坐(zuò)標係中的(de)方(fāng)向數分別為(wéi)(ml,nl,ll)和(mr,nr,lr),那麽兩線段間(jiān)的最短距(jù)離d 為:
式中:(xl,yl,zl)、(xr,yr,zr) 分別為端點Li 或Li-1、Ri 或Ri+1在基坐標(biāo)係的坐標. 設定不(bú)碰撞的距離(lí)為γ, 則(zé)不碰條件應(yīng)滿足d > γ, 發生碰撞的情(qíng)況隻可能在圖10中的第1 種,引入可能發生碰撞的檢驗條件來求解雙臂運動逆解:
圖10 兩臂杆的空間線段避碰模型(xíng)
(2)第2 種分析方法. 把機械臂(bì)連杆(gǎn)簡化為一條線段,當2 隻機械臂發生碰撞時,表示連杆的兩條線段相交, 通過檢(jiǎn)測三角形ABD 和三角形ABC 的環繞方(fāng)向是否(fǒu)相(xiàng)同可判斷點C 和點D 位(wèi)於線(xiàn)段AB 的兩側.如圖(tú)11 所示,與線段AB 和線段CD 相交時,三角形ABD 和三角形ABC的環繞方(fāng)向相反, 三角形CDA和三角形CDB 的環繞方向相反,通過確定2 個三角形的法向向量點積的正負(fù)判斷2 個三(sān)角形的環繞方向是(shì)否相反(fǎn), 點積為負說明2 個三(sān)角形(xíng)的環繞(rào)方向相反,反之則相同(tóng)(規(guī)定三角形所構成平麵的法向向量的方向根據右(yòu)手法則確定). 此時(shí),平麵法線按下列叉積形式(shì)計(jì)算:
n =(B - A)×(A - C)
線段AB 和CD 相(xiàng)交則有:
((B - A)×(A - D))×((B - A)×(A - C))< 0
((D - C)×(C - A))×((D - C)×(C - B))< 0
(3)2 種方法比(bǐ)較. 第1 種方法計明顯計算量大,實時性稍差, 再(zài)者考慮到以後路徑規劃的實時性要求, 第2 種不失為簡單而又快速的碰撞檢測方法,也是優先選(xuǎn)擇的方法.
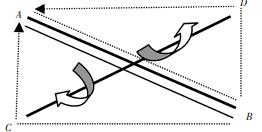
圖11 線段相交的圖形學檢測模型
2.5 工(gōng)作空間分析
工作空間的大(dà)小代表機器人(rén)的活動(dòng)範圍,是衡量機器(qì)人工作能力的重要運動學指標,可方便快速確定機器人手臂能夠(gòu)到達的空間位置;工作空間是從幾何方麵討(tǎo)論機器人的工作(zuò)性能,分析工作空間是確定機器人手臂的構形和參數必須的過程,為進一步杆長的優化提供了依據[14],也對各關節的軌跡規劃提供了一定的理論基礎. 根據正運動學分析中的末端(duān)執行器的(de)位置(zhì)方(fāng)程,利用蒙特卡羅方法(又稱統計模擬法)[15],在matlab 中編程, 以打點方(fāng)式在(zài)三維空間中描繪出機器人單臂工作空間,如圖12 所示.
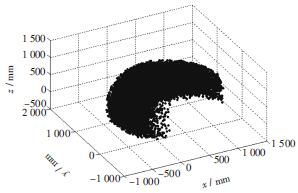
圖12 機器人工作空間(jiān)圖
3、下肢全(quán)向移動係統的運動學(xué)模型
對於四輪係統,假(jiǎ)設(shè)忽略輥子與地麵打(dǎ)滑,輥子中心速度voi與輪轂旋轉速度wi具有確定關係,因此(cǐ)係統中的驅動變量隻有4 個輪轂轉速w1、w2、w3和w4,以輪i 為例, 在坐(zuò)標係xiOi yi中可(kě)得(dé)輪子轉動中心Oi的移動速度,以其中1 個輪(lún)子為(wéi)例,如圖13所示(shì).
圖13 Mecanum 輪與輪i 的輪體結構圖
在坐標係XOY 中可得O 的移動(dòng)速度:
由上麵2 式可得:

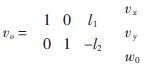
同理,對其他輪子進行分析(xī),可得係統的逆運動學方程:令
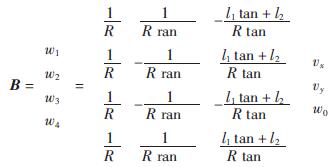
根據機器(qì)人運動學,當(dāng)逆運動學(xué)雅可比矩陣(zhèn)列不滿秩時,係統存在奇異位形(xíng)[9],係統(tǒng)運動的自由度減少.對於本文所論述(shù)的四輪係統,由上式可(kě)知,如果rank(B)= 3,則係統具有(yǒu)實現全方位運動的能力,如(rú)果(guǒ)rank(B)< 3,則係統存在奇異位形,不能實現全方位(wèi)運(yùn)動.
4、結論
(1)通過對移動護理機器人作業要(yào)求分析,在solidworks 建立了三維模型,在此基礎上進(jìn)行了自(zì)由度配置,得出各個模塊機構的具體尺寸,並對驅(qū)動模塊進行了(le)電機的估(gū)算選型,對(duì)選型的電機進行了(le)驗證.
(2)利用D-H 法對上肢(zhī)結構進行了運動學(xué)建(jiàn)模(mó),利用逆運動學求出各個關節角(jiǎo),為今後完成機器人上肢各(gè)關節軌跡(jì)規劃和(hé)動態仿(fǎng)真及製作樣機機器(qì)人奠定了基礎; 對上肢雙臂建立兩杆避碰模型, 提出了2種相碰的檢驗條(tiáo)件(jiàn)並進行(háng)了比較,得出簡單而又快速(sù)的碰(pèng)撞檢測方(fāng)法,避免了雙臂同時(shí)運動(dòng)時的碰撞情(qíng)況發生;最後在matlab 中為機器人進行了工作空間分析,對下一步進行個杆件的優化提供參考.
(3)對下肢的移動方式進行選擇, 根據選擇(zé)的輪式結構建(jiàn)立了運動學模型,通過逆運動學速度雅可比矩陣秩的計算,優選出四輪全方位運動係統(tǒng)的最(zuì)佳結構布(bù)局形式.
投稿(gǎo)箱:
如果您有機床(chuáng)行業、企業相關新(xīn)聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床(chuáng)行業、企業相關新(xīn)聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
")
行業數(shù)據
| 更多
- 2024年11月 金屬切削機(jī)床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月(yuè) 基本型乘用車(轎車)產量數(shù)據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新(xīn)能(néng)源汽車(chē)銷量情況
- 2024年10月 新能源汽車(chē)產量數據
- 2024年10月 軸承出口情(qíng)況
- 2024年10月 分地區金屬(shǔ)切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年(nián)9月 新能源汽車銷量情況(kuàng)
- 2024年8月 新能(néng)源汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據
博文選萃
| 更多
- 機械加工過程圖示
- 判斷一台加(jiā)工(gōng)中心精度的幾種辦法(fǎ)
- 中走絲線切割機(jī)床的發展趨勢
- 國產數控係統和數控機床何(hé)去何從(cóng)?
- 中國的技術工人都去哪(nǎ)裏了(le)?
- 機械老板做了十多年(nián),為何還是小作坊?
- 機械行業最新自殺性營銷(xiāo),害人害己!不倒閉才
- 製造業大逃亡
- 智能(néng)時代,少談(tán)點智造,多談點製造
- 現實麵前,國人沉默。製造業的騰飛,要從(cóng)機床
- 一文搞懂數控車床加工(gōng)刀具補(bǔ)償(cháng)功(gōng)能
- 車床鑽孔攻(gōng)螺紋加工方(fāng)法及工裝設計
- 傳(chuán)統(tǒng)鑽削與螺(luó)旋銑孔加工工藝的區別