3D掃描儀(yí)")



主軸集成式光纖光柵切削力測量方法研究
2017-3-3 來源:武漢理工大學機電工程(chéng)學院 作者:劉明堯,陳功,張(zhāng)誌建,邴俊俊
摘要:為了穩定可靠地測量切(qiē)削加工過程中切削力的(de)大小以對機床(chuáng)的加工狀態進行監測(TCM),對基於光纖光柵(FBG)傳感技術(shù)的主(zhǔ)軸集成式切削力測量(liàng)方法進(jìn)行了研究。基於光(guāng)纖光柵應變檢測原理和Γ形梁的受力分(fèn)析,提出了4 個完全相同(tóng)並且對稱(chēng)的Γ形梁彈性(xìng)體(tǐ)結構;通過對切削力傳遞(dì)規律的分析,建立起(qǐ)了主軸集成式(shì)切(qiē)削力測量理論模型並確定FBG 的布點;為了驗證模型的(de)準確性,搭建了主(zhǔ)軸集成式光纖光(guāng)柵切削力測量實驗平台,最後通過實驗驗(yàn)證了該方法的(de)可行性和可靠性(xìng)。
關鍵詞:光纖布拉格光柵;主軸集成;切削力;Γ形(xíng)梁
1.引言
切削力是描述切削加工過程中最重要的特征,其大小和動(dòng)態變化反映(yìng)了切削(xuē)過程中刀具與(yǔ)工件的相(xiàng)互(hù)作用情況和工件表麵的形成過程。通過監測(cè)切削加工(gōng)過程中切削力(lì)的變化可以間(jiān)接反映刀(dāo)具切削狀態的變化,因此切削力的精確有(yǒu)效(xiào)測量對於機床加工狀態的監測(toolcondition monitoring,TCM)具有重要意義。Yaldiz S 等人[12]基於應變片設計了八角環結構的車削和銑削測力儀;Panzera T.H.等人[3]基於(yú)應變片設計出空心圓柱雙端(duān)固定梁結構的車削測力儀;程金生等人[4]基於應變片設計了輪輻型車削力(lì)傳感器;Rizal M等(děng)人[5]基於(yú)應變片設計了Γ形梁結構的切(qiē)削力測力儀;而Song A 等人[6]基於Γ形(xíng)梁結構設(shè)計(jì)了應變式(shì)多維力傳感器;大(dà)連理工大學的張鐵等人[7]設計出了壓電式車削測(cè)力儀,瑞士的Kistler 公司是壓電(diàn)式測(cè)力傳感器領域的全球引領者,研製出(chū)各種類型的測力裝置,國外的(de)許(xǔ)多學者如Totis G 等人(rén)[8]、Scippa A 等(děng)人(rén)[9]等都使用Kistler 公司(sī)的測(cè)力傳感器在切削力測量領域做了大(dà)量研究;Jin W.L.等人[10]和Albrecht A 等人[11]利用位移傳感器檢測刀具或主軸(zhóu)的位移來反映切削(xuē)力的大小,並搭建(jiàn)了銑削(xuē)力測(cè)量係統(tǒng)。然而應變片粘貼工藝複雜,處理電路較多,容易受到電磁幹擾;壓電材料對環境溫(wēn)度濕度(dù)要求較高,價格比較昂貴(guì)且本身具有(yǒu)滯後特性;基於位移測量(liàng)的檢(jiǎn)測係統采集的信號幹擾因素多,不能直接反映刀具的工作狀態。劉明堯等人[1213]提出基於光纖傳(chuán)感技術的八角環結構切削力測量方法;蔣奇等人[14]則提出了基於光纖傳感技術的Γ形梁結(jié)構多維力測(cè)量方法,但其都(dōu)是工作(zuò)台式傳(chuán)感器,通過工作台這個媒介間接地測量切削力,工件的大小和質量會對切削力的測量產(chǎn)生影響。光纖光柵傳感技術製(zhì)作的(de)傳感器具有對電絕緣、抗電磁幹擾能(néng)力強、適用於惡劣環境的(de)測量、體積小、能夠在單根(gēn)光纖上實現分布式測量等優點。因此本文基於(yú)光纖光柵傳感技術提出了(le)集成在(zài)機床主軸上的切削力傳感檢測(cè)方法,設計了傳感器結構(gòu),搭建了實驗平台,驗證了主軸集成式光(guāng)纖光柵(shān)切削力測量方法的可行性和可靠性。
2.光纖(xiān)光柵應變檢測(cè)原理
光纖光(guāng)柵反射波的波長同時受反向耦合模有(yǒu)效折射率以及光柵周期影響。它們之間的關係滿足光柵方程[15]:
而溫度和力都會使光纖光柵的反射波長(zhǎng)發生變化,由(yóu)於本文設(shè)計的傳感器集成在主(zhǔ)軸(zhóu)上,遠離切削加工過程中(zhōng)的熱源,因此認為溫度不變,僅考慮切削力的影響。當光纖光柵受到力(lì)的作用而產生拉伸或壓縮(suō)的時候,光柵周期會發生一(yī)定的變化,同時光纖本身的彈光效應(yīng)會使有效折射率也產(chǎn)生變化(huà)。基於(yú)此,可(kě)以建立(lì)光纖(xiān)光柵的應變傳感模(mó)型如(rú)式(2)所示,它表示了當光纖光柵處於軸(zhóu)向應(yīng)變作用狀態下時(shí),光柵的反射(shè)波(bō)長漂移量(liàng)與軸(zhóu)向應變之間的關係。

出相應測點的應變大小(xiǎo)。
3.轉(zhuǎn)換(huàn)彈性體設計
3.1 Γ形梁受力理論(lùn)分(fèn)析
基於前人對於Γ形梁結構測力傳感器的(de)研究,通過FBG 傳感技術將(jiāng)其集成在主軸上(shàng)測量切削力(lì)的大小(xiǎo),下麵分析其受力時的應變分布特(tè)征。
主軸上的傳感器(qì)在切削加(jiā)工過程中(zhōng)5 個自(zì)由度受(shòu)到限製,隻有沿軸向轉動的自由度,因此僅分析Γ形梁受FX2、FY2、FZ2、MX2 和MY2 作用時(shí)的應變分(fèn)布特(tè)點,如圖1 所示。

圖1 Γ形梁(liáng)受力示意圖
根據材料力學可(kě)以分別求出(chū)各(gè)個分力作用時a、b、c3 點(diǎn)的應變值,將他們(men)分別相加即可得到(dào)Γ形梁受力時各個點的(de)總應變大小,如式(5)所(suǒ)示。

3.2轉換彈性體的結構設計
對稱結構受力均勻且便於切(qiē)削力的解耦,因此本文基於Γ形梁的結構設計(jì)了4 個完全相同並且對稱的Γ形梁(liáng)彈性體結構,如圖2 所示。它包括與主軸相連的中間軸部分、作為彈性元(yuán)件的4 個Γ形梁和與(yǔ)刀具相連接的底部圓盤(pán)。

圖2 轉換彈性(xìng)體結構
彈性元(yuán)件的力學特性由其材料和結構決定(dìng),考慮到抗腐蝕性(xìng)、環境因素、剛度(dù)等(děng),本文選用304 鋼作(zuò)為(wéi)彈性體的(de)材料。
4.切削力傳遞規律和FBG 布點
4.1切削力傳遞規律
轉換彈性體(tǐ)的結構簡圖如圖3 所示,將其4 個Γ形梁分(fèn)別記為(wéi)Ⅰ、Ⅱ、Ⅲ、Ⅳ。

圖3 轉換彈性體各梁編號
先定義3 個(gè)直角(jiǎo)坐標係:
1)固(gù)定坐標係XYZ:原點O 為銑刀的刀尖(jiān)點,Z 向(xiàng)為主軸(zhóu)的軸向(xiàng),X 和Y向為(wéi)工作台的(de)橫(héng)向和縱向進給方向。
2)旋轉(zhuǎn)坐(zuò)標係X1 Y1 Z:原點O1 與O 點重合,X1 方向則(zé)為彈性體梁(liáng)Ⅰ和梁Ⅲ所在方向,Y1 方向為彈性體梁Ⅱ和(hé)Ⅳ所在方向。
3)旋轉坐標係X2 Y2 Z2 :原點O2 為轉換彈性體底部圓盤上表麵的中心,而(ér)X2 、Y2 和Z2 向分別與X1 、Y1 和Z平行。
由圖4 中XYZ 與X1 Y1 Z 的相對位(wèi)置可(kě)以得到(dào)2 個坐標係之間的關(guān)係如下:

圖4 固定坐標係XYZ 與旋轉坐標係X1 Y1 Z


圖(tú)5 旋轉坐標係(xì)X1 Y1 Z 與彈性體旋轉坐標X2 Y2 Z2



圖6 彈性體受Fx2 、My2 作用時變形示意圖
圖6 為彈性體受Fx2 和My2 作用時(shí)的變形示意圖,其中實線表示變形前,虛線表示變形後的情況。由於梁Ⅰ相對於底部的圓盤(pán)有一(yī)個Z 方向的(de)位移,為了抑製(zhì)這一相對運動趨勢,底部圓盤對梁(liáng)Ⅰ還會產生一個Z 方向的力,記為FIZ0。同理,圓盤對(duì)梁Ⅲ也會產生一(yī)個Z 方向的力,它們大小(xiǎo)相等,方向相(xiàng)反。故此時梁(liáng)Ⅰ受到3 個力的作(zuò)用(yòng)分別為FIX、FIZ0 和MIY,結合變(biàn)形的協調性,可以得到如(rú)下變形協調方程組:







4.2FBG 布點
由於光纖(xiān)光柵測量切削力實際上也是感知由切削力在(zài)彈性體(tǐ)上產生的應變(biàn)大小。而應變式力傳感器在布置應變測點時(shí)有應力集中的原則,即將測點布置在應變最大(dà)的地方,由3.1 節中的分析可知,應變最(zuì)大的地方都在梁的根部(bù),但是若將光纖光柵粘貼在梁的根部會導致光纖光柵的輸出端光纖產生極大的彎曲從而導致解調儀無法解調出信號。所以,本文布點的原則是在保證解(jiě)調儀能夠解調出(chū)足夠強度信號的前提下,盡量將光纖(xiān)光柵貼到距離梁根部近的(de)地方,並且貼在(zài)各梁表麵寬度的中間處,即中性層上。
具(jù)體的布點及光纖光柵編(biān)號如圖7 所示(shì)。本次選(xuǎn)用(yòng)的3 根光纖光柵中心波長分別為1 555 nm、1 550 nm 和1 537 nm,分別記(jì)為FBG1、FBG2 和FBG3。其中FBG1 粘貼在橫梁的上表麵,FBG2 粘貼在橫梁(liáng)的側麵,FBG3 粘貼在(zài)縱梁的表麵,分別對應2.1 節中(zhōng)的a、b、c 3 點。

圖(tú)7 光纖光柵的布點及編號
5.實(shí)驗研究(jiū)
5.1 切削力測量實驗平(píng)台
為了(le)通過實驗驗證主軸(zhóu)集成式光纖光柵切削力傳感器數學模型(即式(22))的正確性以及傳感器的(de)可靠性,本文設計了主軸集成式切削力傳感器實驗平(píng)台。此平台的主(zhǔ)要組(zǔ)成部分如圖8 所示。

圖8 主軸集成式光纖光柵切削力測量實驗(yàn)平台(tái)概覽(lǎn)
實際搭建完成的平台如圖9 所示。

圖9 測量實驗(yàn)平台實物圖
5.2傳感器的靜態標定
為了分(fèn)析傳感器的可行性和檢測(cè)方法的(de)可靠性,首先需要對傳感器進行靜態標定,即φ=0°時(shí)傳感器輸入與輸出之間的關係。
5.2.1X 方向切削力的靜(jìng)態標定
平台裝配完(wán)成後,轉動主軸將彈(dàn)性(xìng)體調到初始位置(φ=0°)。接著(zhe)利用徑向力加載裝置先給彈性體(tǐ)施加上X 方向的切削力,以0.2 kN 為步長,直至加到2 kN 左右(即依次分別施加0.2 kN、0.4 kN、0.6 kN、0.8 kN、1.0 kN、1.2kN、1.4 kN、1.6 kN、1.8 kN 和(hé)2 kN 的力),加載和減載各做3 次。將(jiāng)實(shí)驗測得的三個FBG 的波長數據轉換為應變後(hòu)進行擬合,結果如圖10 ~12。
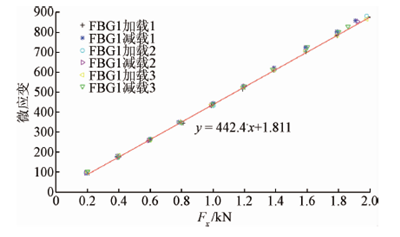
圖(tú)10 X 方向力加減載時(shí)FBG1 數據擬合曲線

圖11 X 方向力加減載時FBG2 數據擬合曲線

圖12 X 方向力加減載時FBG3 數(shù)據擬合曲線(xiàn)
通過對比圖10 ~12 可以很直觀地看到(dào)FBG2 和(hé)FBG3 的擬合效果不如FBG1 好,誤(wù)差較大,這是因為受X 方向切削力作用(yòng)時,FBG2 和FBG3 處的(de)應變水平與FBG1 處相比較低,特別是FBG2 處,滿量程也才9 個微應變,而FBG1 處滿量程有近900 個(gè)微(wēi)應變。因此,X 方向的切削力主(zhǔ)要由FBG1 來反映。由3 條擬合曲線可以得到當X 方向(xiàng)切削力作用時,各個FBG 產生的微應變大小(xiǎo)規律,即式(shì)(25)所示。

5.2.2Y方向切削力的(de)靜態標(biāo)定
完成X 方向的加(jiā)減載實驗後,接著進行Y 方向切削力的加減載實驗。同理得到當Y 方向切削力作用時,各個FBG 產生的(de)微應變大小(xiǎo)規律,即式(26)所示。
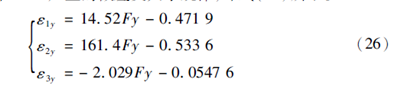
由式(26)可以看出當彈性體受Y 方向切削力作用(yòng)時,FBG2 的應變水平最高,而FBG1 和FBG3 的應變較小,特別是FBG3 的(de)應變大小相對於FBG2 來說基(jī)本可以忽略。因(yīn)此,Y方向的切削力主要由FBG2 來反映(yìng)。
5.2.3Z 方向切削力的靜態標定
在完成X 和Y方向的加減載實驗後,最後進行Z 方向切削力的標定實驗,同理可以得到式(27)

可以看出當彈性體受Z 方向切削力作用時,3 個(gè)FBG 處的應變水平並沒有如X 和Y 方(fāng)向切削力作用時那麽顯(xiǎn)著的區別,因此,Z 方(fāng)向切削力測量(liàng)的準確性也是最差的。
結合式(25)~(27)可以得到:

由於實際使用時需要根據測(cè)得的應變(biàn)反求處切削力的大小,因此需要通過矩陣運(yùn)算將式(28)的等號左邊(biān)變為切削力矩陣,經過MATLAB 運算後,保留4 位有效數字,得到的結果如式(29)所示(shì)。

式(29)隻是φ=0°時的切削(xuē)力模型,還不是完整的數學模型,要(yào)想(xiǎng)得到完整的切削力模型,還需要將轉角矩陣代入其中。結(jié)合式(22)得到完整的切削力模型如式(30)所示。

5.3其他角度下傳(chuán)感器的靜態實驗
為了驗證式(30)在φ≠0°時的適用性,還分別進行了φ=30°和φ=45°時的靜態試驗。首先以φ=30°為例,將初始狀(zhuàng)態下的轉換彈性體轉過30°,依次分別給X、Y、Z 方向加上1 000 N 的切(qiē)削(xuē)力,分別記下3 個狀態下3 個FBG 的波長數據。將其轉化為微應變後如表1 所示。
表1 φ=30°時FBG 微應變大小

將φ=30°,FX =0.99 kN 時各個FBG 微應變大小代入式(30)的模型中,算得FX =0.966 9 kN,誤差為2.3%,同理可(kě)求得FY =1.044 kN,誤差為3.4%,FZ =1.085 kN,誤差為7.4%。
再將(jiāng)彈性體調到φ=45°的(de)狀態,同樣的實驗過程得到表(biǎo)2。
表2 φ=45°時FBG 微應變大小

此狀(zhuàng)態下算得FX =0.960 6 kN,誤差為4.9%,FY =1.057 kN,誤差為(wéi)4.7%,FZ =0.932 0 kN,誤差(chà)為7.7%。考慮到實驗過程中標定(dìng)時力傳感器的誤差、角度測(cè)量的誤差、光纖光柵粘貼的位置和(hé)質量好壞以及室(shì)溫的波動等影響,根據上述(shù)實(shí)驗(yàn)結果和誤差可以認(rèn)為主軸集(jí)成式光纖光柵的切(qiē)削力測量方法在靜態時是可行的,式(30)的理論(lùn)模型在靜態時是可靠的。
5.4動態實驗
驗證了靜態時切削力模型的(de)正確性,為了驗證其在動態時(shí)也是適(shì)用的(de),本文(wén)還在(zài)實驗平台上完成了主軸集成式光纖光柵(shān)切削力傳感器的動態實驗。由於還未安裝角(jiǎo)度傳感器,為(wéi)了驗證切削力模型在動(dòng)態時的正確性(xìng),本文將不同主軸(zhóu)轉速、不同切削(xuē)力作用下FBG 的波長數據進行對比,驗證其是否滿足切削力(lì)模型。
5.3.1徑向力動態實驗
首先將式(30)做變換,將FY =0、FZ =0 代入式中得到(dào)3 個FBG 應變大小(xiǎo)與FX 和主軸(zhóu)轉角(jiǎo)之間的(de)關係如式(31)所示。

由式(33)可(kě)以看出,當主軸勻速轉動且切削分力FX單獨作用時,3 個FBG 的應變(或波長)大小隨著時間呈正弦函數(shù)變化,且其幅值大小與轉速無關,而與力FX 的大小(xiǎo)成正比,轉速(sù)n 則影響正弦函數的周(zhōu)期。
1)相同轉速,不同徑向(xiàng)力(lì)
首先將主軸轉速(sù)調(diào)到200 r/min,並且給彈性體加上1 000 N 的(de)X 方向切削力,得(dé)到3 個FBG 波長數據隨時間變化的關係如圖13 所示:

圖13 n =200 r/min,FX =1 kN 時3 個FBG波長隨時(shí)間變化
由圖(tú)13 可(kě)以看出,3 個FBG 的波長數據均呈正弦函數(shù)變化,且周期相同(tóng)。保持轉速不變進行FX =500 N、1 500 N 的實驗,將3次實驗FBG1 的數據作對比,如圖14 所示。

圖14 n =200 r/min,FX =0.5 kN、1 kN、1.5 kN時FBG1 的(de)波長(zhǎng)
由圖14 可以(yǐ)看出,相(xiàng)同轉速,不同FX 作用下FBG1的波長均呈正弦函數變(biàn)化,且周期相同,但幅值不同,FX =1 kN 時的幅值為FX =0.5 kN 時的2 倍,而FX =1.5 kN時的幅值(zhí)為FX =0.5 kN 時的3 倍,FBG2 和FBG3的規律和FBG1 相(xiàng)同,由此可知FBG 的應變大小和FX 成正比,滿足式(33)。2)不同轉速,相(xiàng)同徑向力將FX 設定為1 kN,再分別進行n =100 r/min 和n =300 r/min 的實驗,測得的FBG1 的波長數據如圖15 所示。

圖15 FX =1 kN,n =100 r/min、200 r/min、300 r/min時FBG1 的波長(zhǎng)
由圖15 可以看出,不同轉速,相同FX 作用下FBG1的波(bō)長同(tóng)樣呈正弦函數變化,但與相同(tóng)轉速不同FX 情況下不同的是,FBG 在不同轉速條件下的幅值基本相同,而周期不同(tóng),其中n =200 r/min 時的周期為(wéi)n =100 r/min時的1 /2,n =300 r/min 時的周期為n =100r/min 時的1/3,FBG2 和FBG3 的規律也和FBG1 相同,即周期大小與力無關,而與轉速成反比(bǐ)。顯然,這也(yě)滿足式(33)的規律。
由上述分析可知,徑向力的(de)動態實驗中,FBG 的應變規律滿(mǎn)足切削力模型。由於FX 和FY 都是徑向力,它們的規律完(wán)全相同,因此可以認為在不同(tóng)徑向力作用下的動態實驗中,FBG 的應變規律滿足切削力模型。
5.4.2軸(zhóu)向力動態實驗
將FX =0、FY =0 代入式(30)中得到3 個FBG 應變大小與FZ 之間的關係如式(34)所示。

由式(34)可以看出,當切削(xuē)分力(lì)FZ 單獨作用時,3個FBG 的應(yīng)變(或(huò)波長)大(dà)小與轉速(sù)和時(shí)間無關,隻與FZ 大小成正比,下麵通過實驗驗證其是否(fǒu)正確。將主軸n 轉速設置為200 r/min,力FZ 設置為1 kN,得(dé)到3 個FBG 波長隨時間變化的曲線如圖16 所示。

圖16 n =200 r/min,FZ =1 kN 時3 個FBG 波長
從圖16 可以看出,3 個FBG 的波長並不是完全沒有變化的,而是呈現一定周期性,似乎不符合切削力模型。然而這是由於動態實驗中有幹擾的原因,特別是動態切削過程中主軸的軸向跳動使得軸向加載套筒與力加載器之間的接觸壓力發生變化從而使加上的力FZ並不是恒定不變的,通過觀察力傳感器(qì)的(de)讀數,FZ 的變化範圍約為0.2 kN,以FBG1 為例,其可(kě)以引起FBG1產生16.5 με的波動;再就是由於臥式安裝,裝置自身重力會對結果造成幹擾,將簡化模(mó)型導入ANSYSWorkbench 中進行仿真,可以得到由於自重在FBG1 上引起的誤差在10 με以上,且這2 個誤差都是隨著主軸轉動呈周期性(xìng)變化的,也就是(shì)說(shuō)各(gè)項誤(wù)差源產生的實驗總誤差在26.5 με以上。而(ér)圖(tú)16 中FBG1 的最大波長與最小波長(zhǎng)之間的差值為40 pm 左右,對應微應變(biàn)大小為33.2 με,然後由(yóu)式(34)可知由(yóu)1 kN 的FZ 在FBG1 處引起的應變大約為82.4 με,大於33.2 με,由此可見,圖16 中的波長不(bú)是直線的原(yuán)因並不是切(qiē)削力模型錯誤,而是由於實驗過程中(zhōng)的(de)上述誤差的存在(zài)而導(dǎo)致的,FBG2 和FBG3 也(yě)是如此。因此,去除這(zhè)些誤差因素(sù)後,可以認(rèn)為(wéi)在軸向力(lì)動態實驗中(zhōng),FBG 的應變(biàn)規律(lǜ)基本滿足切削力模型。根據徑向力動態實驗和軸向力動態(tài)實驗(yàn)可以認為切削(xuē)力模型在動態時也是適用的。
6.結論
以切削力為研究對(duì)象,針(zhēn)對傳統(tǒng)應變式和壓電式測力傳感器易受電(diàn)磁幹擾和(hé)平台類傳感器易(yì)受工件質量和大小影(yǐng)響等問題,基於光纖傳感技術提出了集成(chéng)在主軸中的光纖(xiān)光柵傳感器。從理論上分析了切削力的傳遞規律和(hé)受切削(xuē)力作用時彈性體的應變分布規律,建(jiàn)立了切削力測量的理論模型。並搭建了主軸集成式切(qiē)削力傳感器實驗平台以進行實驗分析。通(tōng)過對理論分析和靜(jìng)、動態實驗分(fèn)析的對比,驗證了(le)該檢測方法的可行(háng)性和可靠性。
投稿箱:
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行資訊合作,歡(huān)迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行資訊合作,歡(huān)迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
馬")
業界視點(diǎn)
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機(jī)床產量數據
- 2024年(nián)11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新(xīn)能源汽車產量數(shù)據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能(néng)源汽車產量數(shù)據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金(jīn)屬切削(xuē)機床產量數據
- 2024年10月 金屬切削機(jī)床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數(shù)據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據(jù)
博文選萃
| 更多
- 機械加工過程圖示
- 判斷一台加工中心精度的(de)幾種辦法
- 中走絲線切割(gē)機(jī)床的發展趨勢
- 國產數控係統和數控機床何去何(hé)從?
- 中(zhōng)國的技術工人都去哪裏了?
- 機械老板做了十多年,為何還是小作坊?
- 機械(xiè)行業最新(xīn)自殺性營銷,害人害己!不倒閉才
- 製造業大逃亡
- 智能(néng)時代,少談點智造,多談點製造
- 現實麵前,國人沉(chén)默。製造業的騰飛,要(yào)從機(jī)床
- 一文搞懂數控(kòng)車(chē)床加工刀具(jù)補償(cháng)功能(néng)
- 車床鑽孔攻(gōng)螺紋加工方法及工裝(zhuāng)設計
- 傳統鑽削與螺旋銑孔加工工藝的區(qū)別