太克")



異形螺杆的車床數控係統開發
2019-6-14 來源:河南科技(jì)大學機電工(gōng)程學院 作者:庫祥臣,薛留偉,梁怡
摘要:為了(le)加(jiā)工具有複雜(zá)結構的異形螺杆零件,設計了一個專用於異形螺杆加工的開放式車床數控係統。該係統硬件以工控機IPC為基礎,以運動控製器GTS-800為核心,確立了IPC+GTS運動控製器的體係結構,能同時完成插補計算、伺服控製(zhì)、係統管理等任務。係統軟件采用麵向對象和模塊化編程技術,以Visual Studio 2012為編程環境開發人機交互界麵。整個係統(tǒng)軟硬件功能實現模塊化劃分,能對多種不同型線的螺杆進行車削加(jiā)工。實驗結果表明:該係統人(rén)機(jī)界麵友好(hǎo),能夠長期(qī)可靠工(gōng)作,可(kě)以(yǐ)滿(mǎn)足加工螺杆的數控車床係統(tǒng)的控製要求(qiú)。
關鍵詞:異形螺杆;運動控製器;車床數控係統;人機交互界麵
前言
螺杆是重要的工業基礎零件,被廣泛用於石油、化工、製冷、橡塑機械等(děng)眾多工業領域(yù)中。由於使用環境和功能不同,使得螺杆的形狀(zhuàng)和大小差(chà)別懸殊,形成多種多樣形狀複雜的異形螺杆(gǎn)。異形螺杆的型線多為變螺距、變槽深、變螺棱寬、變底徑及變螺紋前後角中的一種或是多種的組合。隨著(zhe)螺旋(xuán)曲麵螺杆(gǎn)應用範(fàn)圍(wéi)的不斷(duàn)增加,異形螺杆的應用目的也不盡相同,螺旋曲麵成形機製各異,螺杆型線也(yě)複雜多樣,這給異形螺杆的加工帶來很大的困難,尤其是在提高異形螺杆的加工精度方麵。目前(qián)大多數螺(luó)杆製(zhì)造企業加工工藝落後,螺杆加(jiā)工(gōng)多采用(yòng)普通車(chē)床(chuáng)、銑床配以專用成形刀具和簡易數控(kòng)機床為主,但是在實際加工過程中(zhōng)切削狀態不穩定,刀具磨損嚴重,加工成本較高,表麵精度達不到要求。發現國內外異形螺杆(gǎn)數控車削目前應用(yòng)極少,研究開發異形螺杆專用車床數控係統,為加工異形螺杆提供了一個新的思路,在保證加工質量的同時提高了生產效率(lǜ),極具研究價(jià)值。
1、異(yì)形螺杆的數學模型
根據異形螺杆的(de)形狀特點建立螺旋線的數學模型。一般螺旋線(即等螺距等底徑螺旋線)的方程在笛卡爾坐標係(xì)下為
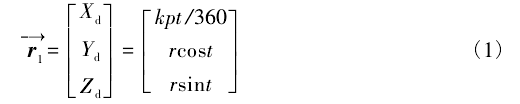
其中,X軸為螺杆的軸向(xiàng)方向。
1.1 異形螺杆(gǎn)槽底螺旋線方程
(1) 變底徑等螺距螺杆槽底螺旋線
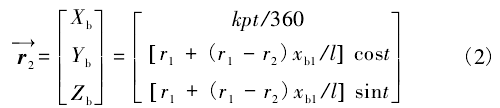
(2) 變螺(luó)距等底徑螺杆槽底螺旋線
(3) 變螺距變(biàn)底徑(jìng)螺杆槽底螺旋線
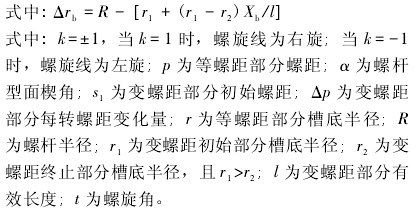
1.2 異形螺杆槽頂螺(luó)旋線方程
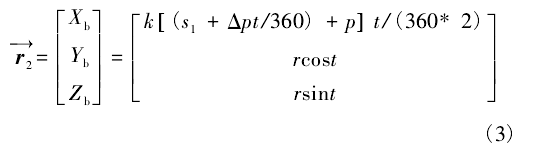
(1) 等螺距(jù)螺杆槽頂螺(luó)旋線(xiàn)
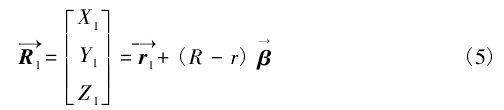
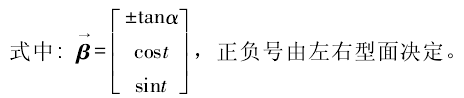
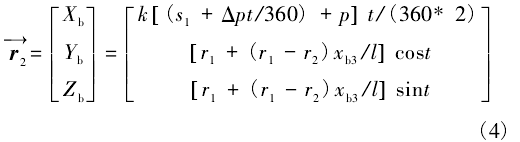
(2) 變螺距變底徑螺(luó)杆槽頂螺旋線

2、異形螺杆的加工原理
普通異形螺杆一般分為3段,即(jí)加(jiā)料段(duàn)、壓縮段和計量(liàng)段,加料段為固體輸送(sòng)段(duàn),底徑較小(xiǎo),采用等螺距螺旋線;壓縮段為過渡段,底徑是變化的,采用變螺距變槽深(shēn)螺旋線;計量段(duàn)為溶體輸送(sòng)段,螺槽較小,采用(yòng)等螺距螺(luó)旋線(xiàn)。其中壓縮段(duàn)螺杆是數控車床加工的難點(diǎn)。依據異形螺杆的結構和特點,螺杆數控車床(chuáng)應具(jù)備(bèi)3個坐標軸,如圖1所示,包括:工件的旋轉(C軸)、車(chē)刀沿工件(jiàn)的(de)軸(zhóu)向運動(Z軸)和車刀沿工件的徑向運動(X軸),3個運動必須由數控計算機(jī)同時控製,才能加工出上述各類型的螺杆。由於螺(luó)杆作為核心部件要求同軸(zhóu)度較高,在加(jiā)工的時(shí)候(hòu)采取兩頂尖裝夾一次加工成型。係統采用半閉環控製方式,雖然控製精度比閉環控製(zhì)方式低(dī),但加工成本低、整體結構簡單、易於調整,並且(qiě)隨著速度檢測元件和絲杆螺距精度的提高以及各種補償功能(néng)的實現,故仍可得到相當(dāng)高(gāo)的(de)控製精度。
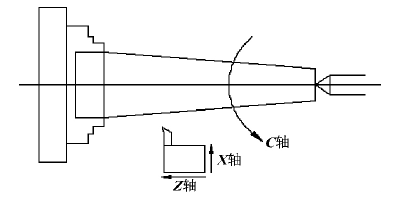
圖1 螺杆數(shù)控車床的受控坐標軸
異形螺杆的加工需要滿足下列幾個條件:(1)機床主軸(zhóu)與刀具之間必須保持(chí)嚴格的運動關係,即主(zhǔ)軸旋轉時刀具沿其軸向(xiàng)按預先設定的螺旋線變化曲線運動規律走刀,並且要與主軸的轉速相關聯(lián)。(2)由於異形螺杆的齒(chǐ)形曲線不能夠一刀車出,需要多次(cì)按同一規(guī)律走刀後方可切削出符合曲線要求的齒形輪廓(kuò),特別注意刀具的軌跡必須與前一次的(de)軌跡(jì)重合,不能產(chǎn)生“亂扣”現象。(3)異形螺杆幾何形狀參數化。
3、數控車床係統硬件構成(chéng)
係統的硬件(jiàn)結構如圖2所示。圖2係統硬件結
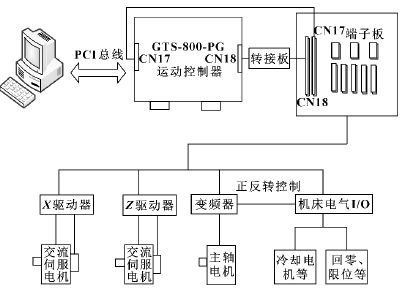
圖2 係統硬件(jiàn)結構圖
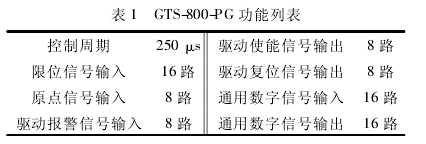
工控機選用研華AWS-8259,主板為PCA-6186LV-00B2E,CPU為PIV-2.8G,內存256 M,硬盤80 G,機箱為AWS8259TP6002E-T,主要完成各軸(zhóu)的運動參數設定和數據的存儲以及人機界麵交互功(gōng)能;運動控製卡選用深圳固高科技公司的GTS-800-PG控製卡,其核心處理器是由DSP和FPGA組成,可(kě)以(yǐ)同步(bù)控製8個運動軸,能實現複雜的多軸協調運動。運動控製器以插卡形式嵌(qiàn)入工控(kòng)機中,它們之間(jiān)通過PCI總線通信,隻需要調用動態鏈接庫gts.dll就(jiù)可實(shí)現兩者間的(de)實時通信。其主要功能說明如表1。
4、數控車床係統軟件(jiàn)設計
該係統的軟件設計采用了模塊化的設(shè)計方法,運動控製器提供C#等函數(shù)庫和Windows動態鏈接庫,在Windows環境下(xià)以Visual Studio 2012為編譯環境進行人機交互界(jiè)麵的開發。係統軟件包括控製軟件和管理軟件,控製軟件完成刀具補償(cháng)、位置和速度控製、插補運算、軌跡規(guī)劃等任務;管理軟件完成螺杆加工(gōng)程序(xù)的輸入(rù)輸出、係統信息的(de)顯示以及係(xì)統故障診斷等功(gōng)能。通訊模(mó)塊實現運動控製器程序與人機界麵應用(yòng)程序之間的通訊。
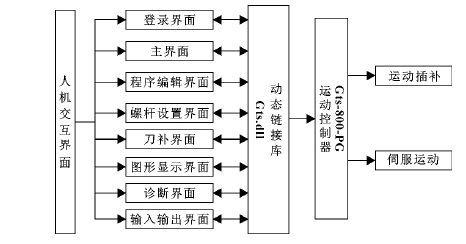
圖3 係統軟件結構圖(tú)
4.1 Windows係統(tǒng)下動態鏈接庫的使用
在Windows係統下使用GTS運動控製器,首先安裝驅動程序,然後可以使用(yòng)支持動態鏈接庫的開發工具來開發(fā)應用程序。下麵(miàn)說明(míng)在Visual Studio 2012的使用:(1)啟動Visual Studio 2012,建立(lì)C#工程;(2)將動態鏈接庫gts.dll和函數(shù)聲明文件拷貝到工程文件夾“..\bin”中的debug或者release中;(3)選擇“Project”菜單下(xià)的“Add existing Item”菜單項,選擇函數聲明文件gts.cs,將(jiāng)其添加到工程中;(4)在using指(zhǐ)令(lìng)集中加入using gts。到此,就可以在C#模塊中通過mc.函數名的方(fāng)式調用庫中的任(rèn)何函數。若建立通訊失敗,運行軟件時會(huì)有消息框提(tí)示,方便用戶(hù)查找原因。
4.2 係統人(rén)機界麵的設計
係統人機界麵包括登錄界麵(miàn)、主界麵、螺杆(gǎn)設置界麵、程序編輯界麵、輸入輸出界麵等(děng)。其中主界麵(miàn)實時顯示各加工軸的當前位置、係統狀態、係統時間以(yǐ)及加工程序執行區。螺杆(gǎn)設(shè)置界麵包括螺杆的總體信息和基本參數設置,總體信息顯(xiǎn)示螺杆名稱、材料名稱、技術要求等;螺杆參數(shù)設置可以輸入螺杆的長度、導程、槽深、螺棱寬度等參數,能實時打開和保存當前信息。主(zhǔ)界麵如圖4所示,螺杆設置界(jiè)麵如圖(tú)5所示。
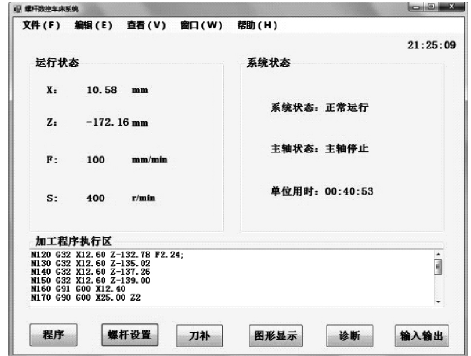
圖4 主界麵
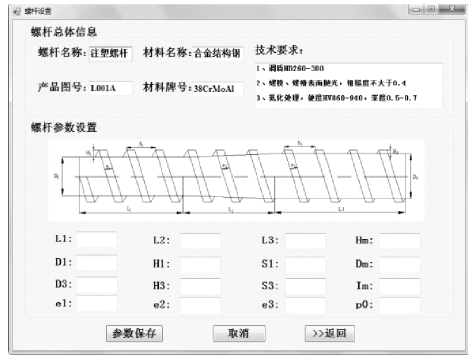
圖5 螺杆設置界麵
在程序編輯界麵中,可以手工編寫加工程序,也可以直接打開現有的加(jiā)工程序或者直接將程序下載到GTS運動(dòng)控製器中。在輸入輸出界麵(miàn)中,顯示相應的狀(zhuàng)態信息,輸入主要包(bāo)括工作方式、液壓係統、運動狀態、驅動器狀態(tài)、伺服使(shǐ)能等信息;輸出主要包括加工軸、報警燈、變(biàn)頻器等信息,正常時(shí)指示器為綠色(sè),出現故障時指示器會變成紅色。程序編輯界麵如圖6所示,輸入輸出界麵如圖7所示。
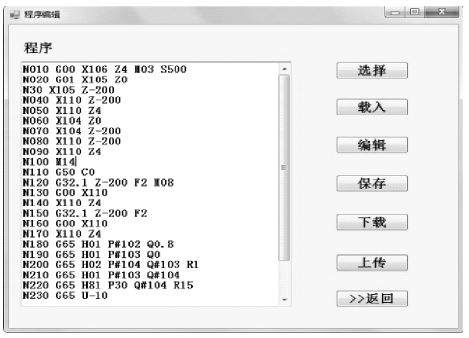
圖6 程序編輯界麵
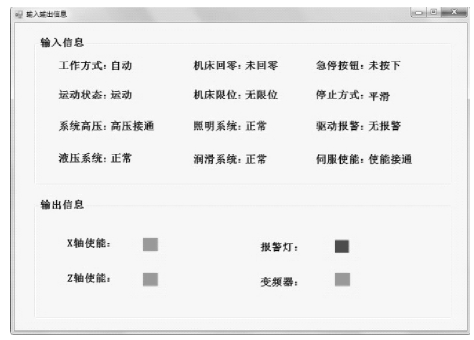
圖(tú)7 輸入輸(shū)出界麵(miàn)
當係統發生故障時,報警信息消息框會自(zì)動彈出來,提(tí)示(shì)操作者發生故障的位置和類型並保存在故障曆史記錄中,並向控(kòng)製部(bù)分發(fā)出急停指令,幫助維修人員(yuán)及時排除故(gù)障,大大提高了生產效率。
4.3 通訊模塊
通訊模塊是建立運動控製器與(yǔ)上位機(jī)對話的通道,能把底層(céng)的GTS控製程序與上位機IPC控製程序(xù)在邏輯上連接起來(lái),GTS提供了一套DLL和Vx D,協助用戶(hù)完成穩定可靠的通訊。建立通(tōng)訊後,用(yòng)戶設計軟件時可(kě)以使用固高公司提供的gts.dll動態鏈接庫,其中(zhōng)包含近200個(gè)函數可以調用。主要函數如(rú)下(xià):
GT_Open();//打開運動控製(zhì)器和運動控製(zhì)器建立通(tōng)訊
GT_Close();//當程序運行結束後,關閉運動控製器
GT_Reset();//複位運動控製器,使(shǐ)所有的寄存器恢複到默認狀態
GT_Ctrl Mode();//軸(zhóu)控製模式,參數設為0,即模擬量輸出閉環控製;參數設(shè)為1,即脈衝量輸出開環控製
GT_Step Dir();//將脈衝輸出通道的脈(mò)衝輸出(chū)模式設置為”“脈衝+方向”
GT_Download();//下載運動程序到運動控製器
關鍵部分程序:
{
//初始化程序(xù)
{
short sRtn;//指令返回值變量
sRtn=mc.GT_Open(0,1);
sRtn=mc.GT_Reset();
sRtn=mc.GT_Load Config(“GT800_test.cfg”);//下載配(pèi)置信息到控製器,其中GT800_test.cf是配置文件
sRtn=mc.GT_Clr Sts(1,8);//清除1—8軸的軸狀態
for(short i=1;i<=8;++i)
{sRtn=mc.GT_Axis On(i);}//使能運(yùn)動軸
commandhander(“指令”,sRtn);//指令返(fǎn)回值校驗
}
……//定時器函(hán)數事件,設置采樣間隔100ms
private void timer_Tick(object sender,Event Args e){……
sRtn=mc.GT_Get Axis Enc Pos(axis,out p Value,count,out p Clock);//讀取運動軸實際(jì)位置sRtn=mc.GT_Get Axis Enc Vel(axis,out p Value,count,out p Clock);//讀取運動軸實際速度sRtn=mc.GT_Crd Status(crd,out run,out segment,fifo);//讀取坐標係運動狀態(tài)sRtn=mc.GT_Get Di(mc.MC_GPI,out l Gpi Val-ue);//讀取數字IO輸(shū)入狀(zhuàng)態sRtn=mc.GT_Get Do(mc.MC_GPO,out OG-po Value);//讀取(qǔ)數字IO輸出(chū)狀態
}
}
5、實驗結果與分析(xī)
實驗采用勻加速曲線變化規律的壓縮段螺杆,螺杆參數界麵設置起始螺距s1為17 mm,終止螺距s3為18.8 mm,長(zhǎng)度(dù)L2為180 mm,起始底徑D1為88.4 mm,終止底徑D3為83.0 mm,螺(luó)棱寬度e為8.8 mm,根據上麵設置參數計(jì)算出該段(duàn)螺杆(gǎn)的總圈數Im為10,導程增量P0為0.094 736 mm,測得實際壓縮段螺杆參數如表2所示。
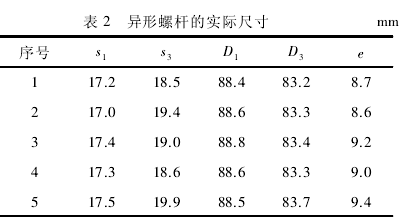
依據設定的參數,從表2的5組實驗數據可以看出實際尺寸和設定的參數總體相差很小,但終止螺距相對波動較大,與設定值偏差最大處達到了1.1 mm,產生這些誤差(chà)的主要(yào)原因是工況頻繁發生變化而引起的刀具磨損程(chéng)度時刻(kè)變化,因此,在今後對該(gāi)係(xì)統的改進完善過程中需(xū)要加強對刀具補償分析,以便設置更加合(hé)理的螺杆加(jiā)工參數。
6、結論
在對具有複雜空(kōng)間形狀的異形螺杆研究的基礎上(shàng),分析了異形螺(luó)杆的加工原理,設(shè)計了一套專用於(yú)異形螺杆(gǎn)加工的車床數(shù)控係統。該係統充分發揮了IPC強(qiáng)大的後台管理能力和GTS良好(hǎo)的實時運動(dòng)控製能力,實現了運動控製卡參數設定、螺杆加工參數設置、自診斷、係統狀態顯示等主(zhǔ)要功能。運用該係統進行了異形螺杆的加工實驗,實驗表明該係統在控製性能、可靠性、加工精度(dù)等方麵達到了預期目標,具有一定的應用價值。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合(hé)作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合(hé)作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業界視(shì)點
| 更多

行業數據
| 更多(duō)
- 2024年11月 金屬切削(xuē)機床產量數據
- 2024年11月 分地區金屬切削(xuē)機床產(chǎn)量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新(xīn)能源汽車產量(liàng)數據
- 2024年11月 新能(néng)源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年(nián)10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數(shù)據
- 2024年9月 新能源汽車(chē)銷量情況
- 2024年8月 新(xīn)能源汽(qì)車產量數據
- 2028年8月 基本型乘(chéng)用車(轎車)產量數據(jù)
博文選萃
| 更多
- 機械加工過程圖示
- 判斷一台加工中心精度的幾種辦法
- 中走絲線切割機床的發(fā)展趨(qū)勢
- 國產數控係統和數控機床何去何從?
- 中(zhōng)國的技術工人都去哪裏了?
- 機(jī)械老板做了十多年,為何(hé)還是小作坊?
- 機(jī)械行業最新自(zì)殺性營銷,害人害(hài)己!不倒閉(bì)才
- 製造業(yè)大(dà)逃亡(wáng)
- 智能(néng)時代,少談點(diǎn)智造,多談點製(zhì)造(zào)
- 現實麵前,國(guó)人沉默。製造業的騰飛,要從機床
- 一文搞懂數控車床(chuáng)加工刀具補償(cháng)功能
- 車床鑽孔攻螺紋加工方法及(jí)工裝設計
- 傳統鑽削與(yǔ)螺旋銑孔加(jiā)工工藝的區別