


液體靜壓主軸回轉精度測試(shì)方法的(de)研(yán)究
2017-3-29 來源:空軍勤務學院(yuàn)航空四站係 作(zuò)者:浮燕,李(lǐ)想,王(wáng)輝
摘要:在分析現有主軸回轉精度測試方法的基礎上,研究了一種兩點法主軸(zhóu)回轉精度測試方法。該方法首先在主軸空載條件下,采用“標準球法”測得(dé)主軸回轉誤差,采用“垂直布(bù)置(zhì)兩點法”在主軸軸頸上定點(diǎn)采樣,從采樣數據中減去對應位置的主軸回轉誤差,得出主軸圓度誤差;然後在(zài)主軸加工條件下,利用第一(yī)步中的“垂直布置兩(liǎng)點法”在主軸上定(dìng)點采樣,從實時采樣數據(jù)中減去第一步測得的(de)主軸圓度誤差,最終得出主軸加(jiā)工條件下的動態回轉誤差。結果表(biǎo)明(míng):提出的兩點法主軸回轉精度測試方法是有效可行的。
關鍵詞:主軸;回(huí)轉精度;二點法;誤差分離(lí)
0.前言
回轉精度是衡量超精密(mì)機床主軸的關(guān)鍵(jiàn)技術指標,是影響機床加工誤差(chà)的重要因(yīn)素。文中以高速精(jīng)密機床廣泛采用的液體懸浮(fú)式主軸為研究對象,測試其在(zài)加工條件(jiàn)下的回轉精度。主軸空(kōng)載條(tiáo)件(jiàn)下,流體懸浮電主軸誤差運動(dòng)的重複性很好,以同步誤(wù)差(chà)為主,異步誤差近(jìn)似為正態分布(bù)噪聲,可采用多個采(cǎi)樣值平均的方法減小和消除,利用誤差分離技術即可測得主(zhǔ)軸(zhóu)回轉精度。主(zhǔ)軸加工條件下,機床主軸回(huí)轉誤差運動受供油壓力、脈動轉矩等動力學因素及環境噪聲等隨機因素的影響,往往表現出較強的非周期(qī)性、非(fēi)平穩特性,傳統的主軸回轉誤差測試技術不再(zài)適用(yòng),需要尋找更合適的(de)數據處理和分析方法。
1.主軸回轉軸線和回轉誤差的定義(yì)
要實現(xiàn)對主軸回轉精度的測試,首先要明確主軸回轉軸線和回轉誤差的定義。根據“cIRP統一文件”規定,主軸回轉軸線(xiàn)是指主軸繞其轉(zhuǎn)動(dòng)的直線,該直線與主軸固定連接,並與主軸一同相對(duì)於(yú)另一(yī)條(tiáo)稱為軸線平均線的直線做軸(zhóu)向、徑向和角度運動,軸線平均線是固定(dìng)不動的,它處於(yú)回轉軸線的平均位(wèi)置(zhì)上‘¨。主軸實際(jì)回轉軸線相對於其理想回轉軸線的位置變動,被定義為主軸(zhóu)回轉誤差,其基本(běn)運動(dòng)形式如圖1所示。
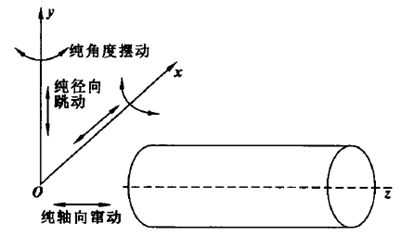
圖1 主軸回轉誤差運動示意圖
2.現有主軸回轉精(jīng)度測試方法
2.1傳統測試(shì)方法
2.1.1單(dān)點法
單點法使用一個傳感器在被測截麵的一個方向上獲取數據(jù),在(zài)理想測試(shì)條件下,其測量結果是主軸回轉誤差在傳感器軸(zhóu)線方向上的分量(liàng)與(yǔ)被測截麵形狀誤差的疊加。
2.1.2垂直布置式兩點法
垂直(zhí)布置式兩點法使用(yòng)兩(liǎng)個垂直布置的傳感器在被測截麵的兩個方向獲取數據,通過合成(chéng)兩組數據(jù),在平麵內刻畫主軸軸(zhóu)心軌(guǐ)跡。該方法不能實現誤差分離,多在被測截麵形狀誤差遠小於主軸回轉誤差測試條件下使用。
此(cǐ)外,伍良生教(jiāo)授(shòu)等口1開發了一種數理統計法誤差分離技術,該方法同樣采用兩個垂直布置的傳感器(qì)進行測量,結合了高速(sù)高(gāo)精度主軸的特點及主軸軸心(xīn)運動的統計規律特性(xìng),運用數學統計(jì)理論實(shí)現誤差分離。
2.1.3反向法
反向法是Donald8叫【31在1972年首先提出的,它使用一個傳感器在被(bèi)測截麵的兩個相反方(fāng)向上獲(huò)取數據,其工作原理如圖2所示。
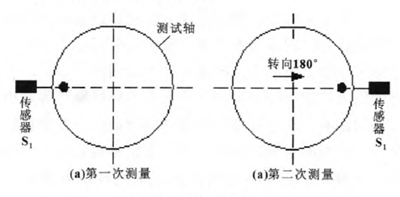
圖2反向法原理圖
首先使(shǐ)用一(yī)個傳感器對安裝在主軸上的標準(zhǔn)球進行第一次測量,得到反向前(qián)讀數值s。(p),然後軸係(xì)不動(dòng),標準球和傳感器各自相對於(yú)軸係轉動(dòng)1800,再(zài)進行第二次測量,得到反向後讀數值S:(p)。其中|s。(p)和S:(口)均包含被測截麵形狀誤差和主軸回轉誤差,並有如下關係:
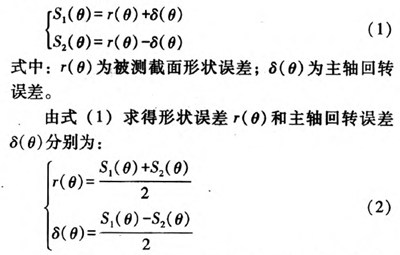
在理想測試條件下,反向法能夠實現誤差分離,得出主軸回轉誤差在(zài)傳感(gǎn)器軸(zhóu)線方向(xiàng)上的分量(liàng),但其對傳感器及標準球的轉位(wèi)精(jīng)度要求較高。
2.1.4對稱布置式兩點法
對稱布置式兩(liǎng)點法㈨使用兩個對稱布置的傳感器在被測截麵的兩個相反方(fāng)向上獲取數據,其工作(zuò)原理如圖3所示。
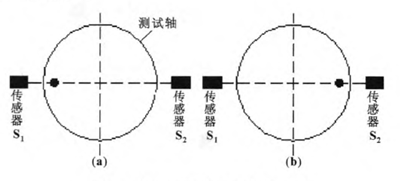
圖3對稱布置式兩點法原理圖
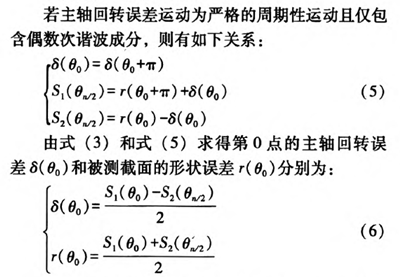
由上述(shù)原理類推,可求出第l,2,⋯,n一1點的結果。對(duì)稱布置式兩點法多在主軸回轉誤差以偶數次諧波成分為主測試條(tiáo)件下使用,在理想測試條件下,其測量結果是主軸回轉誤差在傳感器軸線方向上的分量。
2.1.5傳統三點法(fǎ)圓度誤差分離方法
1966年日本(běn)學(xué)者青木(mù)保雄等”1提(tí)出三點法圓度誤差分離技術。其工作原理(lǐ)如圖4所示。
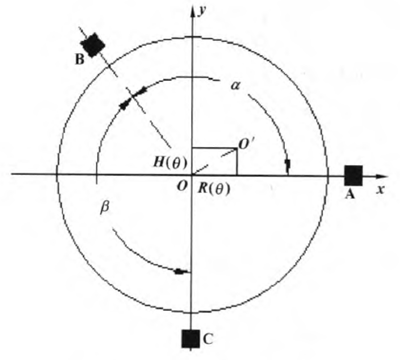
圖4 傳統三點法原理圖
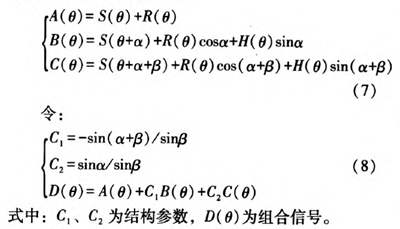
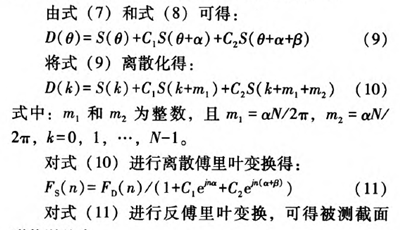
為主軸回轉中心(xīn),D為3個傳感器A、B、c軸線的交點,且。處於o’的平均位置上,a、JB為傳感器安裝角,.s(p)為被(bèi)測截麵形狀誤差,R(口)、日(一)分別為主軸回(huí)轉誤差在菇軸和(hé)y軸上的分量(liàng)。3個傳感(gǎn)器同時采(cǎi)樣。主軸轉動一周,傳感器在被測截麵上(shàng)均角采樣Ⅳ點,獲得的測量信號分別為A(p)、B(p)和c(口),其輸出為:
傳統三點法能夠(gòu)實現誤差分離,測試快捷,滿足實(shí)時在線測量要求,但存(cún)在原理誤差,對傳感(gǎn)器的安裝定位精度要求較高。萬德(dé)安、劉海江哺1在傳(chuán)統三(sān)點法的基礎上通過重新布置3個傳(chuán)感器的安裝角直接獲得主軸回轉誤差的各次諧波分量(liàng)j洪(hóng)邁生、鄧宗(zōng)煌等門1提(tí)出了精確的時(shí)域三點(diǎn)法圓度誤差(chà)分離方法,該方法基於誤差分離技(jì)術的原則,僅需在時域上直接對實(shí)測數據按簡便(biàn)代數式進行遞推即可進行(háng)分(fèn)離運(yùn)算,因而更為方便,實時性也更強,但(dàn)是,初值問題會影響時(shí)域三點法的分離精(jīng)度。
3.兩點法主軸回轉精度測(cè)試方法(fǎ)
以高速精密機床廣泛采用的(de)液體懸浮式主軸為研究對象,測試其加工條件下(xià)的主軸回轉精度。非加(jiā)工條件下,流體懸浮(fú)主軸回轉誤差運動的重複性很好,以同步誤差為主,異步誤差近似為正態分布噪聲。加工條件(jiàn)下,流體懸浮主軸回轉誤差運動(dòng)受供油壓力、脈(mò)動轉矩等動力學因素及環境噪聲等隨機因素的影響,往往表現出較強的(de)非周期性、非平穩特性¨1,傳統的主軸回轉精度測試(shì)方(fāng)法不再適用。文中提出一種簡便、準確的兩點法主軸回轉精度測試方(fāng)法,有效地解(jiě)決了這一問題。
第一步,在(zài)主軸空載條件下,利用垂直布置的傳感器A和傳感器B在安裝於主軸軸端(duān)的高精度標準球上采樣,如圖5所示。忽略標準球的形狀誤差,通過(guò)濾除基波消除偏心誤差,通過取多周(zhōu)采樣數據的平均(jun1)值消除隨機誤差,得到空載條件下的主軸回轉誤差。
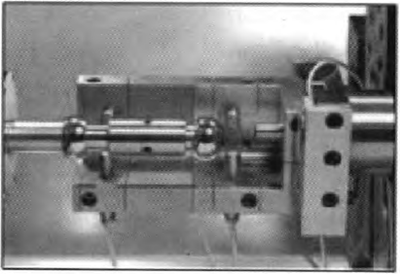
圖5標(biāo)準球測試法
第二步,在主軸空載(zǎi)條(tiáo)件下(xià),利用垂(chuí)直布置的傳感器A和傳感器B在主軸軸頸(jǐng)上嚴格定(dìng)點采樣,如圖6所示。通過濾除基波消除(chú)偏心誤差,通過取多周采樣數據的平均值消除隨機誤差。從采樣數據中減去第一步測得的對應采樣位(wèi)置上(shàng)的主軸回轉誤(wù)差值,得出主軸被測截麵(miàn)圓度誤差。
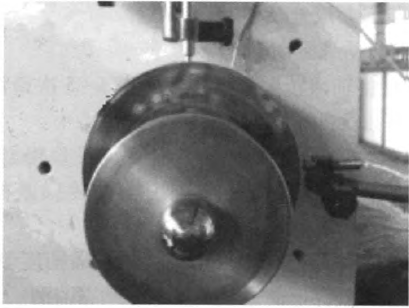
圖6兩點測試法
最後(hòu),在(zài)加工條件下,利用第二步安裝(zhuāng)好的(de)“垂直布置(zhì)兩點法”在主軸上嚴格定點采樣,從實時采樣(yàng)數據中減去第二步測得的對應采樣位置上的主軸圓度誤差,即可得出加工條件下的主軸動態回轉誤差。
4.實驗研究
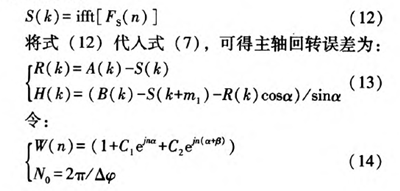
被測對象為自主開發的35 kW/6 000 r/IIlin超高速磨削(xuē)電機內置式(shì)液體懸浮電主軸試驗台(tái),如(rú)圖(tú)7所示。
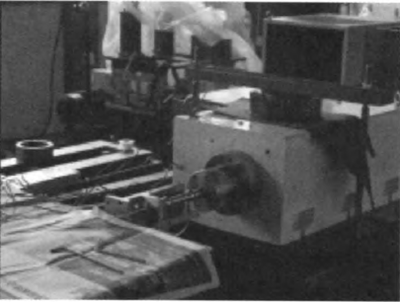
圖7超高速磨削電機內置式(shì)液體懸浮電主軸
測試係統采用美國雄獅精(jīng)儀公司的CPLl90回轉測量儀,如圖8所示。

圖8主軸(zhóu)回轉精度測試係(xì)統
CPLl90回轉測量儀利用兩個垂直布置的傳感(gǎn)器實現主(zhǔ)軸(zhóu)徑向回轉誤(wù)差的兩點(diǎn)法測量,忽略了標準球的形狀誤差,並通過濾除基波消除(chú)偏心誤差,其傳感器(qì)的主要技術(shù)參數如表1所示。
表1傳(chuán)感器主(zhǔ)要技術指(zhǐ)標
利用cPLl90回轉測(cè)量儀中的兩個傳感器(qì)組成如(rú)圖6所示的傳感器布置方式,直(zhí)接在(zài)主軸外圓輪廓上采樣。借助CPLl90回轉測量儀的(de)硬(yìng)件係統(tǒng),即可實現兩點主軸回轉精度(dù)測試方法。
4.1 非加工條件(jiàn)下主軸(zhóu)回轉誤(wù)差測量(liàng)
降(jiàng)低環境噪聲,僅(jǐn)用液壓工作站(zhàn)給軸(zhóu)係供給穩定的油壓,液體懸浮主軸在油(yóu)壓的作用下發生自轉,主軸此時的誤差運動主要由軸係的結構因素確定,以周期性成分為主。
首先,利用CPLl90回轉測量(liàng)儀在標準(zhǔn)球(qiú)上采(cǎi)樣,通過濾除基波消除偏心誤差,得到(dào)主軸回轉誤差,如圖(tú)9所示。
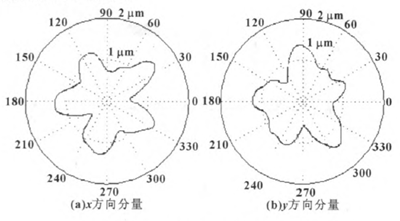
圖9主軸回轉誤差圖
然後,利用兩點法在主軸軸頸上直接采(cǎi)樣,並取多周采(cǎi)樣數據的平均值以消除隨機誤差的影響。從采樣數據中減去第一步測得(dé)的主軸(zhóu)回轉誤差,得到主軸被測截麵圓度(dù)誤差,如(rú)圖10所示。
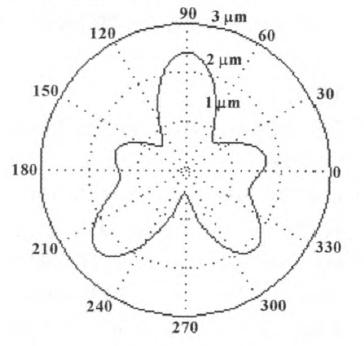
圖10主軸被測截麵圓度誤(wù)差
4.2加工條件下主軸回轉誤差測量
利用VFD—B變頻器啟動電動機,通過連續調(diào)節變(biàn)頻器的頻(pín)率,增(zēng)加電機(jī)的轉矩脈動,模擬主軸受動力學因素等隨機因素的(de)影響情況。采(cǎi)用兩點法在主(zhǔ)軸軸頸上直接采樣,利用CPLl90回轉(zhuǎn)測量儀上的編碼盤,確保(bǎo)主軸被測截麵上的采(cǎi)樣點始終不變。從采樣數據中減(jiǎn)去之前得到的主(zhǔ)軸(zhóu)被測截(jié)麵(miàn)圓度(dù)誤差,即可得到(dào)加工條件下的主(zhǔ)軸回轉誤差,如圖1l和圖12所示。
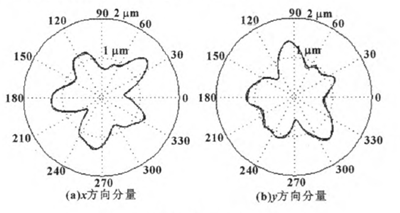
圖11 主軸回(huí)轉誤差極坐標圖

圖12主軸回轉誤差幅值譜(pǔ)圖
從圖11和圖12可看出:主軸回轉(zhuǎn)誤差(chà)以同步誤差成分為主,其(qí)中3次及5次諧波成分占有較大(dà)比重,異步(bù)誤差成分較小。
4.3實驗(yàn)結果(guǒ)分析
(1)主(zhǔ)軸回轉誤差頻譜主要由1~5次諧波分量組成,並以3次、5次為主。
(2)主軸圓度誤(wù)差與主軸回轉誤差相似性強,說明主軸的圓度誤差是造成主軸回(huí)轉誤差的重要因素。
(3)利用兩點法測得(dé)主軸被測截(jié)麵圓度誤差後,可實現加(jiā)工條件下的主軸回轉誤差動態監測。
5.結束語
研究了一種簡便(biàn)、準確、能在(zài)主軸加(jiā)工條(tiáo)件下(xià)對其進行回轉精度測試的兩點測量法,闡述了該測試方法的理論(lùn),給出了完整(zhěng)的測量方法及具體的數據處理方法。經理論與實驗研究證實,提出的兩(liǎng)點法主軸回轉精(jīng)度測試方法是有效可行的。
投稿箱(xiāng):
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
")
業界視(shì)點
| 更多
")
行業數據
| 更多
- 2024年11月 金(jīn)屬切削機(jī)床產量數據
- 2024年(nián)11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型(xíng)乘用車(轎車)產量數據
- 2024年11月 新能源汽車(chē)產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能(néng)源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月(yuè) 分地區金屬(shǔ)切削機床產量數據
- 2024年(nián)10月 金(jīn)屬切削機床產(chǎn)量數據(jù)
- 2024年(nián)9月 新能源汽車銷量(liàng)情(qíng)況
- 2024年8月 新(xīn)能源汽車產量數據
- 2028年8月 基本(běn)型(xíng)乘用車(轎車)產量數(shù)據(jù)
博文選萃
| 更多