



基於 PLC 與 GOT 的 CA6140 臥式車床進給係(xì)統的(de)改造設計
2017-7-10 來源:廣東石油化工學院 機電工程學院 作者:喬東凱(kǎi), 趙晶英(yīng), 陳 軍, 廖 輝
摘要: 闡述了 CA6140 臥式車床控製的原理與存(cún)在的問(wèn)題,並細述(shù)了采(cǎi)用可編程控製器(qì)、觸摸屏、編碼器、步進驅動器和步進電機對 CA6140 臥式車床的進給(gěi)運動自動控製的(de)具體方法(fǎ),從(cóng)而實現了該(gāi)車床智能化控製的目的。 實(shí)踐證明該方法經濟實效,對其他類型的機床或電氣設備的改造具有借鑒(jiàn)和指導意義。
關鍵詞(cí): 可編程控製器; 觸摸屏; 車床; 編碼器; 步進電機
0.引言
CA6140 臥式車床進給的轉速控製是通過轉動手柄來控製,要改變刀架(jià)的移動轉速,必(bì)須在刀(dāo)架停止的情況下進行,速度轉換時要轉動手柄,操(cāo)作不便。 有時需要頻(pín)繁地更換其主軸轉速,加快了齒輪之間的磨損,導(dǎo)致轉速達不到(dào)要求。 此外,齒輪在工作時,出現噪聲(shēng)大,啟動、傳動不平穩(wěn),換(huàn)速時衝擊力大等問題。進給運動的進給量是通過手輪來控製的,會出現手輪(lún)轉(zhuǎn)動後,存在一小段(duàn)距離,刀架沒有移動,導致加工出現誤差。
1 調速改(gǎi)造(zào)方案的確定
未改造前,進給運動的轉速是由轉動手柄在(zài)不同擋位來控製,即改變齒輪之間(jiān)的齧合,其進給量則(zé)由手(shǒu)輪控製。 機床改造後,用步進(jìn)電機(jī)代替溜板箱縱向移動的(de)大手輪(lún)和控製中滑板橫向運動的小手輪,並通過編碼(mǎ)器實時反映距(jù)離,采用觸摸屏和 LC技(jì)術控製(zhì)進給運動的進給量和(hé)進給(gěi)速度。(1)調速原理步進電機的轉速
由式(1)可知,改變步進電機的頻率就可(kě)以調節進給速度,並且其頻率可在一定範圍內變化,所以(yǐ)轉速調節(jiē)範圍寬。步進電機的轉動圈數

由式(2)可知(zhī),改變步進電機的(de)脈衝數可以改變步進電機轉(zhuǎn)動的圈數,進而改變移(yí)動的距離。(2)PLC、步進電機、步進驅動器、觸摸屏和編碼器的(de)選(xuǎn)擇根據實(shí)際情(qíng)況,係統需要控製 2 個步進電機,即PLC 需要 2 個高速脈衝輸出(chū), 為方便操(cāo)作和保證(zhèng)係統的可(kě)見性,係統配(pèi)備有(yǒu)觸摸屏,故所需(xū) PLC 的點數(shù)較少,且要連接編碼器,需要晶體管輸(shū)出,最終選擇型號為(wéi) FX3U-32MT 的三菱 PLC。 由於代替手輪(lún)和手柄轉動的(de)步進電機不需要太大力矩,選擇步進(jìn)電 機 57BYG250B -SAFRMC -0152, 其保持轉矩為0.7 Nm,步距(jù)角是 1.8°,相數為(wéi) 2 相。 相應地選擇步進驅動器為(wéi) SH-20402A。 編碼 器(qì)選(xuǎn)擇型號為E6B2 -CWZ5B, 觸摸屏選擇性價比較高的型號為MT8104X 的威綸觸摸屏。(3)PLC 輸入、輸出點的連接PLC 輸入點、輸出點的連接如(rú)表 1、表 2 所示。
表 1PLC 輸入點的連接(jiē)
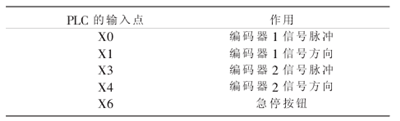
編碼(mǎ)器 1(與大手輪連接(jiē))的脈衝與方向端分別與 X0、X1 連接;編碼器(qì) 2(與小手輪連接)的脈衝(chōng)與方向端分別與 X3、X4 連接; 將一個急停按鈕與 X6連接,用來緊急(jí)停止整個係統。
表 2 PLC 輸出點的連接
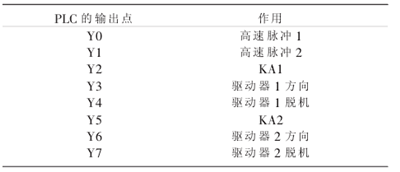
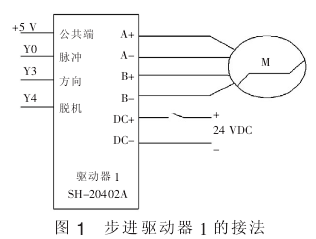
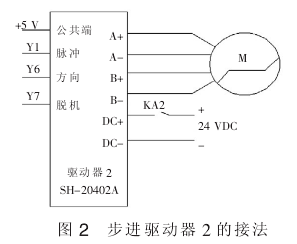
輸出點(diǎn) Y0 用於給控製床鞍和溜板箱縱向移動大手(shǒu)輪的步進電機驅動器 1 發送高速脈衝; 輸出點Y1 用於給控製(zhì)中滑板橫向運動手柄的步進電機驅動器 2 發送高(gāo)速脈衝(chōng)。 連接到 Y2、Y5 的中間繼電器分別控製步進驅動器(qì) 1 和 2 的通電與斷電。 輸(shū)出點(diǎn)Y3、Y6 分別給步進驅動器 1 和 2 發送方向信(xìn)號,控製步進電機 1 和 2 正轉。 輸出點 Y4、Y7 則是使步進驅動器 1 和(hé) 2 脫機。(4)PLC 與步進驅動器、步進電(diàn)機的連接(jiē)PLC 與步進驅動器、步進電機的連接如圖 1 和圖(tú)2 所。
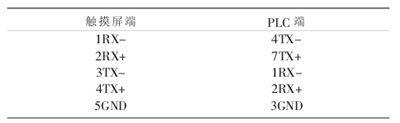
(5)PLC 與觸摸(mō)屏的通訊PLC 與觸(chù)摸屏(píng)的通訊如(rú)表 3 所 示(shì) ,PLC 與 觸摸屏接口類型(xíng)為 RS-485 4W,通訊端口為 COM1,通訊(xùn)線(xiàn):觸摸屏(公頭)1、2、3、4、5 對應 PLC(公(gōng)頭)4、7、1、2、3。
表 3PLC 與觸摸屏的通訊
(6)主軸速度和進給(gěi)運動的控製步進(jìn)電機通(tōng)過步進驅動器來(lái)控製,即 PLC 通過步進驅動(dòng)器來控製步進電機(jī)。 具體方法是 PLC 給步進驅動器(qì)輸出一個高速脈(mò)衝、方向和脫機信號。 因為係(xì)統采用的是 64 細分,所以要將步進驅動器的刻度盤調到 64 細分(fèn)。 編碼器(qì)則連接到 PLC 的輸入點,利(lì)用高(gāo)速計數器記錄下脈衝數,進而通過程序處理,反映出實時距離。PLC 開機初始(shǐ)化的程序如圖 3 所示。
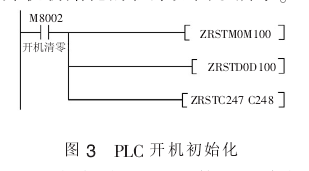
當給 PLC 上電時,M8002 接通一個掃描周期,係統對 M0~M100,D0~D100,C247~C248 進行清零。高速計數器計數並轉換為距離和清零操作程序如圖 4 所示。
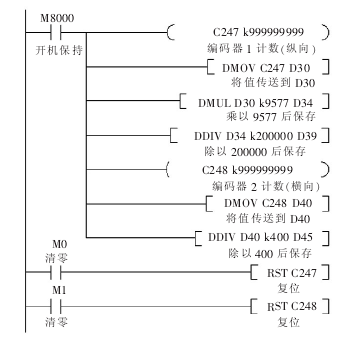
圖 4 高速計數器計數並轉換為距離和清(qīng)零操作
與縱向軸相連接(jiē)的編(biān)碼器是通過式(1)進(jìn)行距離轉(zhuǎn)換,編碼(mǎ)器的軸與齒數為 120 及模數為(wéi) 0.25 的齒輪相聯。 因此,可以求出(chū)齒輪的直徑
如(rú)圖 4 所(suǒ)示,當 PLC 開機(jī)後,編碼器轉換程序一直在執行(háng),反映出進給移動的實時距離。編碼器輸(shū)出的脈衝(chōng)用高速計數器計數。 縱(zòng)向編碼器的脈衝由高速計數器 C247 計數, 然後保存(cún)在寄存器 D30中,之(zhī)後乘(chéng)以 9 577,結果保存在 D35 中(zhōng),最後除以200 000,結果保存在 D39 中。 橫向編(biān)碼器的脈衝由高速計(jì)數(shù)器 C248 計數,然後保存在 D40 中(zhōng),再除以400,把運算結果保存在 D45 中。對高速計數器 C247、C248 的清零,則是在手動對完縱(zòng)向和橫向刀後進行,確定零點位置。主軸轉速和方向控製程序如圖 5 所示。
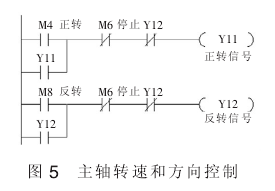
當 M4 接通時,控製主(zhǔ)軸正轉;當 M8 接通時,控製主軸反(fǎn)轉;當 M6 接通時,停止主軸(zhóu)轉動。 同時(shí)正轉和(hé)反轉設計了互鎖,即正、反轉之間的切(qiē)換,必(bì)須要停止主軸,從而保護了(le)主軸電動機。縱向進給速度、進給量和方向控製如圖(tú) 6 所示(shì)。

圖 6縱向進給速度、進給(gěi)量和方向控製
當線圈 M23 接通時,線圈 Y2 通電,給步進驅動器 1 上電;當線圈 M24 接通時,則步進驅動器 1 斷電。 當(dāng) M25 接通時,線圈 Y4 通電,給步進驅動(dòng)器 1發送脫機信號(hào)。 M26 和(hé) M27 是手動分別控製步進電機的(de)正反轉,即(jí)前進或後退。 當 M28 接通時,自動控製步進電機正轉;當 M29 接(jiē)通時,自(zì)動控製步(bù)進電機反轉。 當 M27 或 M29 接通時,切斷步進驅動器(qì)方向信號 Y3, 進(jìn)而控製步進電機反轉。 當(dāng) M28 或M29 接通時,M30 自鎖,給步進驅動器(qì)輸出脈衝。 其中(zhōng) D0 和 D4 的值(zhí)可以根據需要進行改變,分別改變進給縱向的進給(gěi)速度和進給量。橫向進(jìn)給速度、進給量和方向控製(zhì)的程序如圖7 所示。
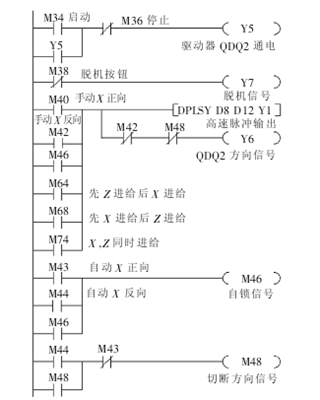
圖 7橫向進給速度、進給量和方向(xiàng)控製
當線圈 M34 接通時,給步進驅動(dòng)器上電;當線(xiàn)圈 M36 接通時,則斷電。 當 M38 接通(tōng)時,給步進驅動器 2 發送脫機信號 Y7。 M40 和 M42 是手動分別控製步進電機的正反轉,即前進或後退(tuì)。 當 M43 接通時,自動控製步進電機正轉;當 M44 接通時,自動控製步進電機(jī)反轉。 當 M42 和 M44 接通時,切(qiē)斷步進驅動器方(fāng)向信號(hào) Y6,進而控製步進電機反轉。 當M43 和 M44 接(jiē)通時,M46 自鎖, 給步進驅動器輸出脈衝。其中 D8 和 D12 的值(zhí)可以根據需要進行改變,分別改變進給橫向運動的(de)轉動速度和進給量。進給運動的速度和進給量轉換如圖 8 所示。
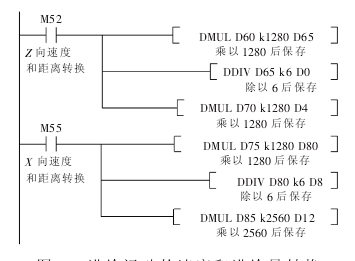
圖 8 進給運動(dòng)的速度和進給量轉換
當 M52 接通時,將速度值 D60 根據式(1)轉換為頻率保存在 D0 中;將進給量 D70 根據式(2)轉換為轉動的圈數後, 再轉變(biàn)為脈衝數保存在 D4。 當M54 接 通時 ,將速(sù)度(dù)值 D75 根 據式 (1)轉 換為頻率保存在 D8 中;將進給量 D85 根據式(2)轉換(huàn)為(wéi)轉動的圈數後,再轉變為脈衝(chōng)數保(bǎo)存在 D12。進(jìn)給運動的橫向與縱向運動的控製如圖 9 所(suǒ)示。9圖 9進(jìn)給(gěi)運動的橫向與(yǔ)縱向運動控製當M60 接通時,M62 自鎖,開始橫向運動;當所走距離值(zhí) D35 與所設距離值 D90 相等時,M64 接通,開始縱向運動(dòng);當所走距離值 D45 與所設(shè)距離值 D95 相等時,複(fù)位 M62,即停止運動。當 M66 接(jiē)通時(shí),M68 自鎖,開始縱向運動;當(dāng)所走距離(lí)值 D45 與所設距離值 D95 相等時,M70 接通,開始橫向運動。當所走距離值 D35 與所設距離值 D90 等時,複位M68,即停止運動。 當 M72 接 通時 ,M74 自 鎖(suǒ) ,橫(héng)向和縱向運動同時進行,當所走(zǒu)距離值與所(suǒ)設距離值相等(děng)時(shí),複位 M74,即停止運動。
2.結語
本設計從(cóng)電氣控製(zhì)方案、元器件選型及機加(jiā)工係統(tǒng)現場環境等因(yīn)素綜合考慮(lǜ),對 CA6140 車床的(de)進給運(yùn)動進行了電氣化改造,改造(zào)後的該設備控製電路簡(jiǎn)單,穩定性和可靠性也增(zēng)強,操作方便,實現了進給(gěi)係統的自動(dòng)化控製,進而提高了加工精度。
投稿箱:
如果您有機床行業(yè)、企業相關新(xīn)聞稿件發(fā)表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業(yè)、企業相關新(xīn)聞稿件發(fā)表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
州金馬")
業界視點
| 更多

行業數(shù)據
| 更多
- 2024年11月 金屬切削機床產(chǎn)量數據
- 2024年11月 分地區金屬切(qiē)削機(jī)床產量數據
- 2024年11月 軸承出口情況(kuàng)
- 2024年11月 基本(běn)型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新(xīn)能源汽車銷量(liàng)情(qíng)況
- 2024年10月 新能(néng)源汽車產量數據
- 2024年(nián)10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年(nián)9月 新(xīn)能源汽車銷(xiāo)量情況
- 2024年8月 新能源汽車產(chǎn)量(liàng)數據
- 2028年8月 基本型乘用車(轎(jiào)車)產量數據(jù)
博文選萃
| 更多
- 機械加工過程圖(tú)示
- 判斷一台(tái)加工中心精度的幾(jǐ)種辦法
- 中走絲線切割機床的發展趨勢
- 國產數控係統和數(shù)控機床何去何(hé)從?
- 中國的技術工人都去哪裏了?
- 機械(xiè)老板做了十多年,為何(hé)還是小作坊?
- 機械(xiè)行業最新自殺性營銷,害人害己!不倒(dǎo)閉才
- 製造(zào)業大逃亡
- 智(zhì)能時代,少談(tán)點智造,多談點製造
- 現實麵前(qián),國(guó)人沉默。製造業的騰飛,要從機床
- 一文搞懂數控車床(chuáng)加工刀具補償功能
- 車(chē)床鑽孔攻螺紋加工方法及工裝設計
- 傳統鑽削(xuē)與螺(luó)旋銑孔加(jiā)工工藝的區別