數(shù)控")



FANUC 數控係統機床返回參(cān)考點(diǎn)功能的應用研究
2020-10-30 來源:上汽通用(yòng)五菱汽車股份有限公司(sī) 等 作者:於雙月,黃曉敏,蒙旭喜(xǐ)
摘(zhāi)要:數(shù)控(kòng)機床能精確控製零件的加工精度,而它的加工是要基於一個固定的參考點,而參(cān)考點的位置(zhì)就是以機床出廠零點為基準(zhǔn)的。通過研究使用 FANUC 數控係(xì)統的數控機床建立參考(kǎo)點的(de)方式,研究返回參考點的三種方式,並結合現場應用案例,總結了數控機床無法正常返回參考點的原因並給出了響(xiǎng)應解決思路,並(bìng)分析(xī)返回參考點(diǎn)過程中常見的問題,可(kě)以有效解決(jué)數控(kòng)機床無法返回零點的問題(tí)。
關(guān)鍵詞:數控機床;參考點;零點;返回參(cān)考點
眾所周知,數控機床能精確控製(zhì)零件的加工精度,而它的加(jiā)工是(shì)要基於一個(gè)固定的參考點,參考(kǎo)點即為機床加(jiā)工程序坐標的起始位(wèi)置。在對數控(kòng)機床的使用和維修時,經常會遇(yù)到無法正(zhèng)常(cháng)返回參考點(diǎn)的故障,返回參考點是機(jī)床正常加工的必要(yào)條件,它的用途很簡單,就是(shì)將數控係統的記(jì)憶位置與設備的(de)某個機械位置統一。各種數控係統回參考點(diǎn)方式有差異。但無論使(shǐ)用哪種數控係統,建立參考點都是必不可(kě)少的步驟,以下僅以 FANUC 數控(kòng)係統作為研究對象。見圖 1。
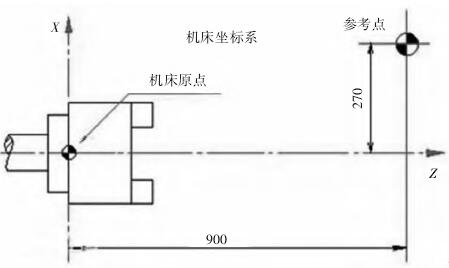
圖(tú) 1 機床參考點示意圖
1、返回參考點的必要性
數控機床位置(zhì)檢測通常使用位置編碼(mǎ)器或(huò)光柵尺(chǐ),分為增量式與絕對式,而數控機床的加工必須依靠坐標位置,如果使用絕對式編碼器或光柵尺,在機床出廠(chǎng)時執行建立參考點的步驟(zhòu)後,位置數據(jù)已經存儲好,再次開關機時不(bú)需要(yào)重複執行返回參考點操作(zuò),但這(zhè)位置數據(jù)記錄需要電池(chí)保持,如果電動電量耗盡沒有及時更換,則位置數據就(jiù)會丟失,坐標數據也就失去記憶,因此必須要(yào)讓各軸回到一個標記好的(de)固定位置,也就是機床的參考點,重(chóng)新記錄位(wèi)置信息,這樣才(cái)能(néng)保證工(gōng)件的加工尺寸,而且機床使用(yòng)的各種刀具、探針、測頭及(jí)補償,都是依賴參考點(diǎn)的建立的坐標執行對(duì)應關係的,如(rú)果沒有回到參考點,則這些數(shù)據也就失去了(le)意義(yì),所以(yǐ)數控機床要正常使用必須要確定好(hǎo)參考點(diǎn)。見圖 2。
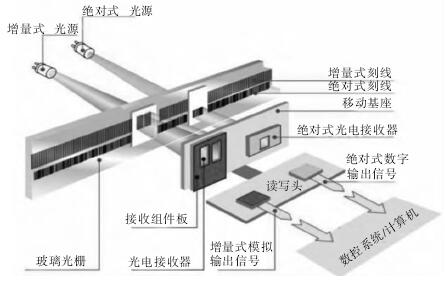
圖 2 光柵尺內部結構圖
2、返回參(cān)考點情況分類
根據數控(kòng)機床選擇的數控係統及(jí)位置反饋元件和(hé)控製方式的差異,返回參考點方式也各不一樣,一般(bān)分為開機後需要返回參考點和開機後不需(xū)要返回參考點兩種情況。
2.1 無擋塊方式回參考點
回參考點的方式無需擋(dǎng)塊,用絕對位置編碼器(qì)或光柵尺的方(fāng)式記錄位置信息,這種方式(shì)在現在的多軸聯動機床(chuáng)上(shàng)比(bǐ)較常(cháng)見(jiàn),由於采用的是能記錄位置信(xìn)息(xī)的(de)裝置,因此需要用到電池作為能(néng)源用於保存信息,由於有位置信息的記錄,之後再開機就無需執行返回參考點操作,如果電池沒電則會(huì)導致位置信息丟(diū)失,機床無法使用,需要更換電池(chí)再次返回參考(kǎo)點才能正常使用。
2.2 擋塊方(fāng)式回參(cān)考點
回參(cān)考點(diǎn)的方式為擋塊方式(shì),通常使用(yòng)增量式的編碼器或光(guāng)柵尺記錄位置信息,由於該方式比(bǐ)較簡單(dān),也沒有(yǒu)後備電池記錄位置信息,因此電後位置信息即會丟失,無法保存,後續再開機則(zé)需(xū)要重新執行返回參考點(diǎn)操作,這種回參考點的方式在一些數(shù)控車床等相對沒那麽(me)複雜的機床(chuáng)上使用較多。
3、返(fǎn)回參考點方式
一般情況下,不(bú)同廠家使用不同的(de)數控係統(tǒng),其返回參考點的方式與原理都會有所不同,但都是先通過擋塊之(zhī)類的減速行程開關(guān)粗定位(wèi),然後再由碼器或光柵尺之類的檢測裝(zhuāng)置精定位兩個步驟(zhòu)。根據(jù)回參考點的動作步驟不同,有以下三種回參考點方式:
(1) 在返回參考點時,伺服軸先向預定方向運(yùn)動,擋塊壓下後正向(xiàng)減速運動,擋塊脫離後,數(shù)控係統開始尋找零點,當(dāng)接收到第一個零點脈(mò)衝時,便已確定參(cān)考點位置。
(2)在返回參考點(diǎn)時,伺服軸(zhóu)先快速按預定方向運動,擋(dǎng)塊壓下後,反(fǎn)向減速運動,脫離零點開關時,再(zài)改變方向正向向參考點移動,當擋塊再(zài)次壓下時,數控係統開始尋找零點,當接收到第一個零(líng)點脈衝,便已確定參考點位置(zhì)。
(3)在返回參考點時,伺服軸先快速(sù)按預定方向運動,擋塊壓下後,不需等待擋塊脫離立即減速,降為設定低速後,即開始尋找零點(diǎn),當接收到第一個零(líng)點脈衝時,立即停止。無論采用何種方式或如何運動,係統(tǒng)都是通過程序編製和(hé)數控(kòng)係統的機(jī)床參(cān)數設定決定(dìng)的,軸的運動速度也是在機(jī)床參數中(zhōng)設定(dìng)的,數控機床回參考點的過程是(shì) PLC 係統(tǒng)與數控係統配(pèi)合完成的。
機床在執行返回參考點操作時(shí),每一步的動作都根據接收到的信號指令進行,因此,清(qīng)楚數(shù)控係統在整個(gè)過程中需要(yào)哪些信號就非常重(chóng)要,如下為與返回參考點有關的對接(jiē)信號點(diǎn):
(1)擋塊使用方式信號:1005#1 DZLX,選擇 0為無擋塊,選擇 1 為有擋塊。
(2)手動返回參考點方向(xiàng)信號:1006#5,選擇 0 為(wéi)正方向(xiàng),選擇 1 為(wéi)負方向。
(3)各軸參考計數器容量信號(hào):1821,指定為執行柵格方式的返回參考點的柵(shān)格間隔。
(4)各軸參考點偏移量信號:1850,設定每(měi)個軸參考點位置偏移的柵格量或參考點的偏(piān)移量。
(5)機械位置與(yǔ)絕對位置建立關係信號:1815#4,使用(yòng)絕對位置檢測器時,第(dì)一次使用先設為 0,再次通電後執行手動返回參(cān)考點操作後,絕(jué)對位置檢測器原點設(shè)立後,及位置關係建立後,改信號會自動設為 1。
4、 應用案例分析
4.1 應用案例 1
車間返修區(qū)一台使用 FANUC 數控係統的數控車床,各軸應用的都(dōu)是絕對式光電脈衝編碼器,一直處於正常(cháng)加工狀(zhuàng)態,但(dàn)在經過一次長假後,開機無(wú)法正(zhèng)常使用。其故障(zhàng)現象為機床開機後出現 306 號報警,反複斷電重啟也無法消除,同時伴隨報警為 300號需要返回參考點。故障檢診斷:由於該數控機床位置檢測(cè)采用的是(shì)絕(jué)對式位(wèi)置檢測裝置,斷電開機時是不(bú)需要再返回參考點(diǎn)的,詢問操作(zuò)人員放假前情況,答複出現307 號報警,由於(yú)不影響生產故未上報。見表 1。
表 1 相關參數及報警號說明
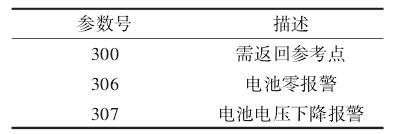
由於最開始出現的是 307 號報警,機電池(chí)電壓(yā)下降報(bào)警,出現該報警時,是提醒後背電池電壓已經不足,需要在 1~2 周內更換電池以保證(zhèng)電(diàn)機編碼器正常(cháng)運行的,而現場沒有及(jí)時更換電池,導(dǎo)致經過一(yī)次長假後電(diàn)池耗盡(jìn),無法(fǎ)正常保存伺服軸位置信息,這時(shí)候出現的報警為 306 號報警,即電池零報(bào)警(jǐng)。故障處理過程:首先替換電(diàn)池,需要注意的是,如果在出現 307 號報警電磁電壓下降(jiàng)報警時更換電池,即使切斷電源,隻要在 10 min 內將電池更換好也不會出(chū)現(xiàn)位置信息丟失的情況,也無需再執行返回參考(kǎo)點操作,因為內部電(diàn)容能保證短時間(jiān)內存儲的(de)位置(zhì)信息(xī)不回丟失,更換檢測編碼器供電(diàn)電(diàn)池後,可以重新返(fǎn)回機床參考點,設定機床參考點位(wèi)置。步驟如下:
(1) 把下麵的 PRM 設置為 0 :PRM 1240、PRM1883。
(2)PRM 1815 Bit 4 (被自動通(tōng)過 PRM 1883 設置為 0)。
(3)設 PRM 1819 Bit 2 = 1。
(4)選擇 Reference,選擇軸鍵,按 Plus- 或者 Mi-nus-鍵,軸開始運行基準點(diǎn),3 個標記 (3 x 停止)後被選擇軸的基準(zhǔn)點運行完畢。
(5)PRM 1819 Bit 2 重新為 0,PRM 1815 Bit 4= 1。
(6) 在 PRM 1883 中有係 統 內 部 的 基 準 值(zhí) ,PMC-診(zhěn)斷% IF 961 Bit x(= 軸) 為(wéi)= 1 ,定義軸的終點位置。
(7)機床關(guān)機,重新啟動後故障解除。
最後,根據(jù)長期現場使用經驗,一般數控機床發生返回參考點故障時主要檢查以下項目:
1) 首先檢查回參考點的模式及故障報警信息,根據(jù)報警提示對應處理。
2)然後檢查硬(yìng)件,減速擋塊、減速開關的位置及狀態一(yī)定要正確。
3)最後檢查參數(shù),看參數設置是否合理。
4.2 應用案例 2
車間返修區一台使用 FANUC 數控係統的數控車床,在某次(cì)更換完絲杆後執行回參考點(diǎn)步驟(zhòu),回參考點運行時動作正常,但每次(cì)回的位置都有差異,參考點位置不固定,每次定位均不同。
故障診斷:由於機床數控係統(tǒng)並無報警,且返回參考點也能正常執行,判斷機床回參考(kǎo)點功能是沒(méi)有問題的(de)。再進一步分(fèn)析,參考(kǎo)點的位(wèi)置雖然每(měi)次都不一樣,但(dàn)總(zǒng)能(néng)停在離開減(jiǎn)速擋塊的位置上。因此,可以初步鎖定問題點出(chū)在脈(mò)衝編碼器沒有及時(shí)檢測到零位檢測信號或絲杠與電機之間(jiān)的聯軸器未安裝好導致出現相對滑動造成的問題(tí)。
故障處理過程:為(wéi)確認問題的原因,先脫開(kāi)了電動機與絲杠間安裝的聯軸器,並(bìng)通過手動方式觸發參考點減速開(kāi)關信號,再進行回參考點驗證,通過此種方(fāng)式,返回參考點總能固定停在(zài)某位置上,這說明編碼器沒有問題,它能正常並及(jí)時檢測到零(líng)位信號,問題的原因很可能出在電機(jī)與絲杠的機(jī)械連接上。經(jīng)過仔細(xì)檢查,原(yuán)來是絲杠與聯軸器間的配合存在間隙,並沒有完好連(lián)接導致出現鬆動。重新安裝後,執行返回參考點正常,位置也固定(dìng),機床故障解除。
5 、結束語(yǔ)
在(zài)機加工(gōng)領域,在出現無法返回參考點故障時,應該根(gēn)據返回參考點的方式原理,從理論上進行故障現象分析診斷,再根(gēn)據步驟來排除故障,否則使用時會直接(jiē)影響(xiǎng)到零件的尺寸加工精度,另一個(gè)重要的是要清楚出現(xiàn)無法返回參考點故(gù)障的可能原因及處理步驟(zhòu),畢竟導致無法返回參考點的原因很多,但原理相對簡單,隻要按流程處理定能將故障解除。本文通過原(yuán)理與實例分享了返回參考點故障的排除方法(fǎ),希望能將返(fǎn)回參考點問題處理(lǐ)經驗分享到其它(tā)工廠。
投稿箱:
如果您有機床行業、企(qǐ)業相關(guān)新聞稿件發表,或進行資訊合作,歡(huān)迎聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企(qǐ)業相關(guān)新聞稿件發表,或進行資訊合作,歡(huān)迎聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息(xī)
州金馬(mǎ)")
業界(jiè)視(shì)點
| 更多

行業(yè)數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年(nián)11月 基本型乘用車(轎車(chē))產量(liàng)數據
- 2024年(nián)11月 新能源汽(qì)車產量數據
- 2024年11月 新(xīn)能源汽車銷量情況
- 2024年10月 新(xīn)能源汽車產量數據
- 2024年10月 軸承出口情(qíng)況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車(chē)銷量情況(kuàng)
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(chē)(轎車)產量數據