")



基於開放式數控係統平台(tái)的空間刀具半徑補(bǔ)償技術實現
2018-8-6 來源:轉載 作者:李傳軍,王立(lì)萍,劉 強,雒新宇
摘要:空間刀(dāo)具半徑補償技術是數控係統實現複雜零件(jiàn)加工的核心技(jì)術。在(zài)基於曲麵(miàn)直接插(chā)補的空間刀具(jù)半徑補償中,使用 3 次(cì) B 樣條擬合刀位文件中的刀位點(diǎn)、切觸點及刀(dāo)軸矢量來獲取刀軌的參數樣條表示,實現空間刀具半徑補償功(gōng)能。通過基於 UG 後置處理的加工軌跡,編製空間(jiān)刀具半徑補償算法係統軟件進行模擬,並在搭建的基於 Twin CAT 的(de)開放式數控係統平台(tái)上進行加工驗證,滿足複雜零件的加工質量要求。此方法(fǎ)為數控係統的(de)空間刀具(jù)補償算(suàn)法研究提供(gòng)可(kě)行性驗證。
關鍵詞(cí):空間刀具半徑補償;曲麵直接(jiē)插補;3 次 B 樣條;開放(fàng)式數控係統平台;仿真驗證
1、 引言
刀具補償技術是數(shù)控係統的核心技術之一,空間刀具補償技術問題(tí)的解決對開發新(xīn)原理數控機床有(yǒu)極其(qí)重要的作用。基於曲麵直接插補的空間刀具半徑補償與傳統的空間刀具半徑補償有很大的不同。傳統的(de)空間(jiān)刀具半(bàn)徑補償針對的是微小直線(xiàn)段(duàn)或微小(xiǎo)圓弧段的刀具補償,此時隻需要對微段的首末端點計算補(bǔ)償值即可完(wán)成整個微段的刀具半(bàn)徑補償,此時(shí)可以通過給出刀具在首末端點處的切觸點作為已知條件(jiàn)來計(jì)算補償量。基於曲麵直接插補的空間刀具半徑補償是在實時插補過程(chéng)中實時計算(suàn)每(měi)個插補點對應的刀具補償量從而實現刀(dāo)具半徑的實時補償。而要在插補過程中計算刀具半徑補償量需要一些已知量來輔(fǔ)助計算,如刀具切觸點坐標、前傾角和側傾角等(děng)。目前的 CAD/CAM 係統支持輸出直線逼近的多軸(zhóu)加(jiā)工代碼,可以得到(dào)刀位(wèi)坐標、刀軸矢量及切觸點矢(shǐ)量,尚不支持輸出(chū)直接使用參數樣條(tiáo)的(de)描述形式,因此通過研究(jiū)空間曲麵直接插補算法和(hé)刀具軌跡的參數樣條(tiáo)擬合(hé),計算實現空間具半徑補償(cháng)並進行了模擬和實驗(yàn)加工驗證(zhèng)得到(dào)很好地效果。
2 、刀軌的參數樣條擬合
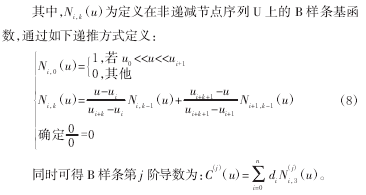
為了實(shí)現基(jī)於(yú)曲麵(miàn)直接(jiē)插補的空間刀具半徑補償(cháng),首先就需要(yào)獲取刀軌的參數樣條表示。通過使用 3 次 B 樣條擬(nǐ)合刀位文件中的刀位點、切觸點及刀(dāo)軸矢量,把擬合的結果用微分幾何中的參(cān)數樣(yàng)條表示。使(shǐ)用 UG 可以獲取的使(shǐ)用直線逼近複雜曲線的刀位文件格式為:GOTO/X,Y,Z,I,J,K,U,V,W;其中(X,Y,Z)為刀位點坐標,是絕對坐標值,代表曲麵(miàn)銑削刀具(球形刀、平底銑刀或環(huán)形銑刀)的刀具底(dǐ)端中心點或刀具端點切削工(gōng)件時切觸點坐標,其數值為工件坐標係內容;(I,J,K)在 CAM 軟(ruǎn)件生成刀具軌跡時表示刀具方向單位(wèi)矢量的位置,具體數值滿足 I2+J2+K2=1,表示其空間位置;(U,V,W)為刀具(jù)與工件構成的幾何模(mó)型中刀具與工(gōng)件的切觸點坐(zuò)標。CAM 軟件(UG 等)生成的刀位文件通過提取,可以得到軌跡上的刀位點、(I,J,K) 表示的刀軸方向矢量坐(zuò)標和通過矢量運算得到的切觸點數據,其坐標可以(yǐ)表示為(Oi,Di,Pi),其中 i=0,1,2,…,m。在參(cān)數樣條曲線的多軸插補中,一般采用雙參數樣(yàng)條的形式(shì)來確定刀軸矢量,如圖 1 所(suǒ)示。
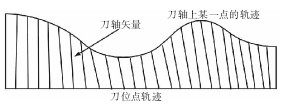
圖 1 雙參數樣條


4 、基於曲麵直接插補的刀具半(bàn)徑(jìng)補償原理(lǐ)
插補(bǔ)得到的插補(bǔ)點還(hái)不能直接輸出給伺服(fú)係統進(jìn)行位置控製。通常刀具半徑補償指的是在插補之(zhī)前根據刀具信息對軌跡進行偏置,由數控(kòng)係統的插補器對偏置後的曲線進行插補,這叫做插補前刀補。未來數控係統通過各種傳感裝置能(néng)在線實時獲取刀具信息,因此在實時插補過程(chéng)中同時進行刀具半徑(jìng)補償(cháng)成(chéng)為可能。插補前刀具半徑補償隻能根據預設的刀具(jù)信息進行刀具半徑補償,如果(guǒ)在加工過程中刀具由於磨損或者其他(tā)原因導致刀具幾何信息(xī)發生改變(雖然非常微小),就可能(néng)造成(chéng)加工質(zhì)量的下降。插補後刀補,即在插補點生成(chéng)之後根據刀具的幾何信息進行刀補。這樣做的好(hǎo)處是能實(shí)時根據刀具信息進行刀具補償,從而考慮(lǜ)刀具加工磨損情況,提高加工質量。通過第(dì) 1 部分我們得到刀軌的參數曲線形式 C1、C2和 C3。首先通過第 2 部(bù)分中的插補算法獲取(qǔ)第 i 個(gè)插補周期的插補參數,此時可以得到第 i 個插補周期(qī)中的(de)刀位點、刀軸矢量及切(qiē)觸點為:
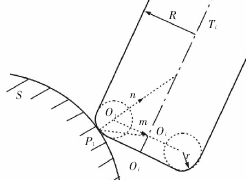
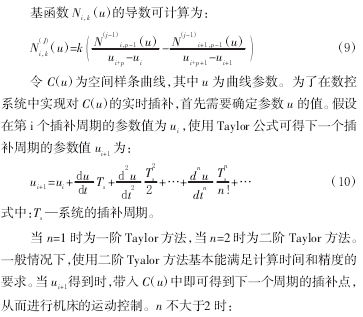
圖 2 環形刀加端銑加工
5、 仿真分析與加工驗證
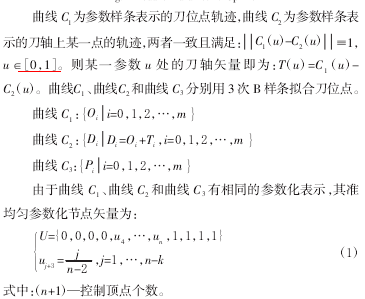
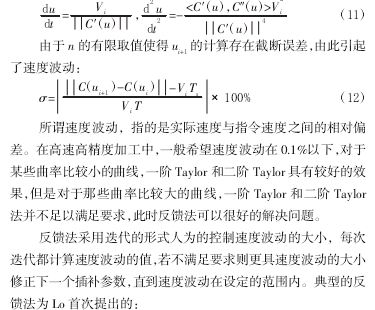
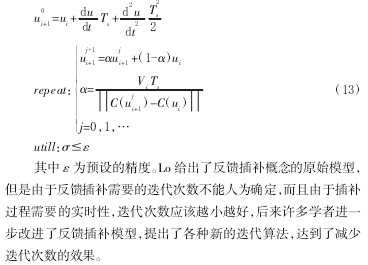
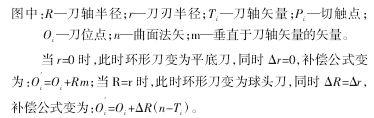
為了驗(yàn)證(zhèng)基於曲麵直接插(chā)補的刀具補償(cháng)算法在實(shí)際加工中的效果,以某一航空發動機葉片曲麵的一段(duàn)加工路(lù)徑為例進(jìn)行(háng)仿真(zhēn)分析與驗證。示例五軸加工代碼中截取的一段葉片加(jiā)工刀具軌跡,其中生成刀位文件時(shí)使用(yòng)的為直徑為10mm 的球頭刀,如(rú)圖 3 所示。曲線 1 為切觸(chù)點軌跡,即加工刀具切削被加工葉片曲麵的軌跡。曲(qǔ)線 2 為刀位點軌跡,及數控係統中插補器需要插補的曲線。曲(qǔ)線3 為刀(dāo)軸上某一點的軌跡。曲線 4 為刀軸矢量。首先(xiān)根(gēn)據第 1 部分給出的刀軌參數樣條擬合方法得到曲線 1、曲線 2 和曲線 3 的參數樣條表示 C1(u)、C2(u)和 C3(u)。仿真時令插補周期 Ts=1m s,進給(gěi)速度(dù)為 F=100m m /s,使用 MATLAB 編寫仿真程序(xù),應用第 2部分中(zhōng)給出的(de) Taylor 二階(jiē)方法進行插補,最終(zhōng)得到 667 個插補點。插補過程中(zhōng)的速度波動,如圖 4 所示。
圖 3 基於曲麵直接插補的刀具補償算法驗證
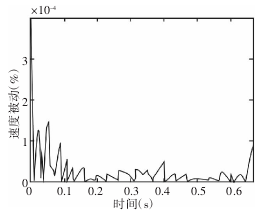
圖 4 插補過程中的速度波動
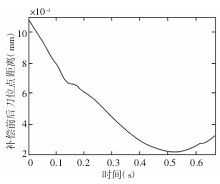
圖 5 補償(cháng)前(qián)後刀位點距離
由圖 5 可以(yǐ)看出,補償前(qián)後刀位點距離(lí)最大可達 10.83μm,這在葉片曲麵的高精度加工中,基於曲麵直接插補的(de)刀具半徑補償是對數控(kòng)加工精度(dù)提高是非常有(yǒu)效的。在基於(yú) Twin CAT 開放式數控係統平台(tái)上,編製直線與直線,直線與圓弧的刀具(jù)補償功(gōng)能程序並加工,如圖 6 所示。
圖 6 開放式數控係統加工平(píng)台
6 、結語
以數控(kòng)係統空間刀(dāo)具半徑補償為(wéi)研究(jiū)對象,利用刀具矢量和方向矢量(liàng),在基於曲麵(miàn)直接插補的空(kōng)間刀具半徑補償中,通過使用 3 次 B 樣條擬(nǐ)合刀位文件中的刀位點、切觸點及刀軸矢量來獲取刀軌的(de)參數樣條表示,實現了空間刀具半(bàn)徑補償,並在搭建的基於 Twin CAT 的開放式數控係統平台上進行算法仿真和加工驗證,能(néng)滿足加工質量要求。為數(shù)控係統的空間刀具補償算法研究提(tí)供可行性驗證。下一步(bù)研究方向:進一步改進(jìn)刀具補償算法模型,並結合曲麵直接插補理論“一步式”插補前提下,對插補過程中的實時刀(dāo)具補償優化,分(fèn)析誤差原因和尋找減少誤差的(de)方法,使其更加與工程實際相一致。
來(lái)源:(1.承德石油高(gāo)等專科學校,河北 承德 067000;2.中國農業大學 工學院,北京 100083;3.北京航空航天大學 機械工程(chéng)及自動化學院,北京 100191)
投稿箱:
如果您有機床行業、企業相(xiàng)關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削(xuē)機床產量數據(jù)
- 2024年(nián)11月 軸承(chéng)出口情況
- 2024年11月(yuè) 基(jī)本型乘用車(chē)(轎車)產量數據
- 2024年11月(yuè) 新能源汽車產量數(shù)據
- 2024年11月 新能源汽車銷(xiāo)量情況
- 2024年10月 新能源汽車(chē)產量數(shù)據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床(chuáng)產量數據
- 2024年10月 金屬切削機(jī)床產量數據
- 2024年(nián)9月 新能源(yuán)汽車銷量情況
- 2024年8月 新能源汽車產量數(shù)據
- 2028年8月 基本型乘用車(轎車)產量數據