



基於模糊控製的交流伺服係統仿真
2017-6-7 來(lái)源:江(jiāng)西理工大(dà)學電氣(qì)工程與自動(dòng)化學院 作者:徐晨峰,陳強
摘要: 交流伺服係統在實際中存在參(cān)數時(shí)變、負載擾動等問題,本文設計了基於模糊(hú)控製(zhì)的速度環控製(zhì)器。利用Simulink 搭建雙閉環伺服係統仿真,其仿(fǎng)真結(jié)果表明,係統的動態響應(yīng)快,超調小及穩(wěn)態精(jīng)度(dù)高。
關鍵詞(cí): 伺服係統; 模糊控製; 仿真
0.引言
交流伺服係統廣泛應用現(xiàn)代工業中,具有加工精(jīng)度高、生產效率高等特點(diǎn)。伺服係統一般以(yǐ) PID 控製方式為主。傳統 PID 控製實現較為簡(jiǎn)單,且控製效果較佳,然而伺(sì)服係統存在參數時變、負載阻力擾動等(děng)問題,傳(chuán)統 PID較難滿足實際要求[1-4],因(yīn)此,采用更加有效可靠的控製方式也就尤為必要(yào)。模糊控製是一種典型的智能控製方法,它同樣廣泛地應用(yòng)於工業生產中,如數控機床、機器人、溫度控製、反應等[5-6]。模糊控製不需要依靠受控對象的數學模型,避免了煩瑣的運算以及較多可能產生的(de)誤差。本(běn)文將模糊控製與 PID 相結合,將模糊 PI 應(yīng)用(yòng)於速(sù)度(dù)環控製器中,以此建立雙閉環伺服係統。通過仿真對比,表明模糊 PI 控製較(jiào)之傳統 PID 控製具(jù)有更快(kuài)的動態響應快、超調小以及穩(wěn)態精度高(gāo)。
1.伺服(fú)係統(tǒng)
近(jìn)年來,對交流伺服係統的研(yán)究(jiū)主要集中在兩個方麵: 控製策略、永磁同步(bù)電機。永磁同步電機控製比較適合於數控機床的加(jiā)工,其主要用途在於驅動(dòng)中小容量。伺服係統主要采用三環( 位置環、速度環、電(diàn)流環) 控製技術,為(wéi)解決係(xì)統中的電流諧(xié)波問題,常采用脈衝寬度調製技(jì)術,包括正弦波調製、空間矢量調製等(děng)。A. R. Beig 等人於 2007年提出了空間矢量脈寬調製算法,並通過與正弦(xián)波調製(zhì)的對比實驗,證實了空間矢量脈寬調(diào)製技術(shù)可以減少電流諧波(bō),並能夠(gòu)進一步(bù)擴大逆(nì)變器功率的使用範(fàn)圍。本文(wén)的伺服係統采用的是(shì) SVPWM 技術,有關 SVPWM 技術的原理已有很多文獻說明[7-10],其算法流程如圖(tú) 1 所示。
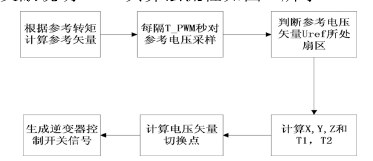
圖 1 算法實現流程圖(tú)
2.模糊控製
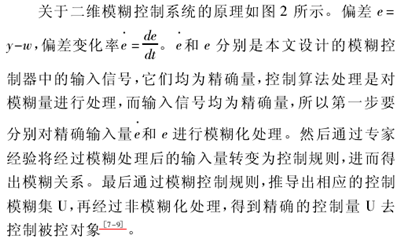
2. 2 模糊控製原理
2
2. 3 模糊控製器的設計步驟
模糊控製器的設計步驟(zhòu)分為以(yǐ)下四步:(1) 確定模糊控製器輸入輸出變量(liàng)
(2) 隸屬度函數的選擇
常(cháng)用的隸屬函數有三角(jiǎo)函數形和正態(tài)函數型。正態函數型因計算量大,適用於對係統快速性(xìng)要求較低的(de)場合。三角隸屬函數計算工作量相對少許多且(qiě)精度也(yě)能達到滿意的特點,因此本文(wén)選擇三(sān)角隸屬函數。
(3) 設計模糊控製規則
模糊控製規則是設計(jì)模(mó)糊 PI 控製器的關鍵,主要由專家知識和操作人員的實際操作經驗得到的(de)。當偏差較大時,控製(zhì)規則應盡(jìn)快消除(chú)誤差為主,當偏差較小時,控製規則應以係統的穩定性為主。
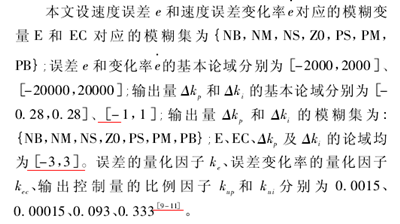
(4) 論域、量化因子和比例因(yīn)子的選擇
3.模糊 PI 控(kòng)製器的設計
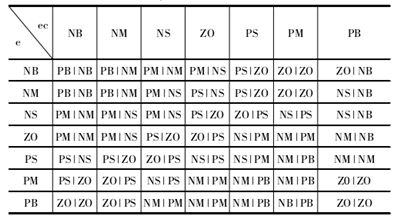
根據前人的經(jīng)驗,被控過程對(duì)參數 kp、ki的(de)自整定要求如下:( 1) 當偏差 e 較大時,為了加(jiā)快係統的響應速度,應取較大的 kp; 同時為了(le)防止係統響應出現較大的超調,產生積分飽和,應對積分作用加以限製,通常(cháng)取 ki= 0,去掉積分作(zuò)用;
表 1 Δkp| Δki模糊控製(zhì)規則表
4.仿真分析
首先,建(jiàn)立係統模型,如圖 3 所示。
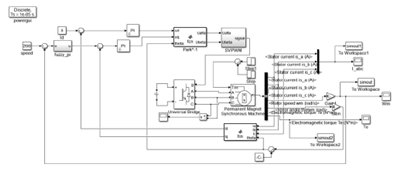
圖 3 采用空間矢量脈寬調製技術的係統仿真模型
根據上述參數,建立模糊 PI 控製器(qì)仿真(zhēn)模型,如圖 4所示。並替換掉原來的速度調節器。kp的初始值取 0. 2,ki的初始值取 6。
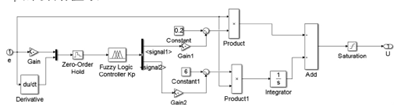
圖 4 模糊(hú) PI 控製器模型
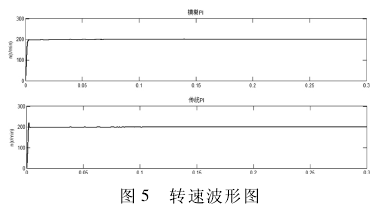
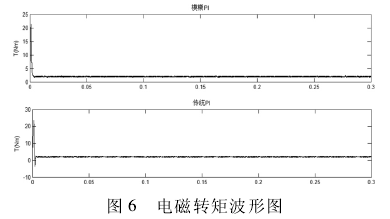
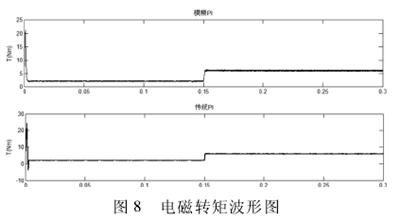
(1) 電機以額定轉矩 2Nm 起動,給定轉速為 200r/min,圖(tú) 5、圖 6 是模糊 PI 與傳統 PI 係統性能對(duì)比。與(yǔ)傳統 PI 控製相比,模糊 PI 控製的轉速調整時間有所減小,而且無超調; 轉矩基本無脈動,而且轉矩達到額定轉矩的(de)時間更快。因此滿載起動時(shí),模糊 PI 控製的係統性能更好,響應速度更快(kuài)。
5.結(jié)束語
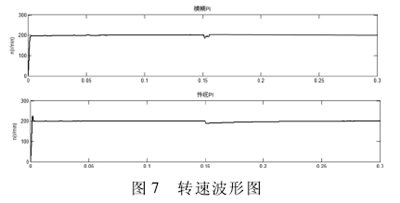
本文(wén)采用模糊控製對交流(liú)伺服係統的速度環控製器參數進行優化,減小了負(fù)載擾動對伺服(fú)係統的影響,提高了係統的響應速度。仿真結果(guǒ)表明: 基於模糊控(kòng)製的雙閉環伺服係統具有超調(diào)量小、響應快(kuài)的伺服性能(néng)。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視(shì)點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產(chǎn)量數據
- 2024年11月 分地區金屬切削機(jī)床產(chǎn)量數據
- 2024年11月 軸(zhóu)承出口情(qíng)況
- 2024年11月 基本型(xíng)乘用(yòng)車(轎車)產量數據
- 2024年(nián)11月 新能源(yuán)汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能(néng)源汽車產量數據(jù)
- 2024年10月 軸承出口情況
- 2024年(nián)10月 分地區金屬切削機床產量數據(jù)
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車(chē)產量數據
- 2028年8月 基本型乘用車(轎車)產量數據