



基於數字化編碼-播放體係結構的(de)電(diàn)火花線切(qiē)割加工數控係統
2017-2-7 來源:上(shàng)海(hǎi)交通(tōng)大學機械與動力工程學院 作者:鄭君民,陶旭(xù)牧野,陳默,陳昊,奚學程
摘要:借(jiè)鑒網絡音視頻製(zhì)作與播放模式,提出了一種基於“數字化編碼-播放”的新概念靈巧數控係統的體係(xì)架構及係(xì)統(tǒng)實現方(fāng)法。該係統采用客戶端/服務器模式,將複雜軌跡運動數字化,即插補(bǔ)過程與機床運動控製分離,以異步運行模式取代傳統的同步運行模式(shì)。編碼(mǎ)器負責(zé)將複雜運動軌跡通過插補算法進行數字化,生成運動比特流文件(jiàn),而直接控製機床運動的(de)數控終端則(zé)從服務器端下載運動比特流(liú)直(zhí)接進行(háng)播放,實現機床的運動。該架(jià)構在大大簡化控製係統終端的(de)同時,顯(xiǎn)著提高了係統的實時性(xìng)。此外,一個服務器還可連接多個數控係統終端,同時加工不同的(de)零件。利用該架構構建的(de)線切割(gē)數控係統證明了基於(yú)數字化編碼-播放架構的數控係統原理的可行性。
關鍵詞:電火花線切割加工(gōng);數控係統;編碼器-播放器架構;客戶(hù)端/服務器;運動比特流
電火花線切割加工廣泛應用於難切削(xuē)材料、模具、精密器件等(děng)加工(gōng)領(lǐng)域。數控係統是(shì)電(diàn)火花線切(qiē)割機床(chuáng)的(de)核(hé)心部件,也是決定線切割係統加工性能及未來自動化、智能化、網絡化的(de)最重要的核心技術的載(zǎi)體。
由於計算機技術(shù)的飛速發展,電火(huǒ)花線切割數控係統正向著智能化、網絡化、集成化及高柔性化的方(fāng)向發(fā)展[2]。純軟件型(PC+實時通訊接口卡)的開放式數控係統因其(qí)繼承了現代計(jì)算機技術的特(tè)點,擁有高計算性能、高(gāo)靈活性與低硬件成本等優勢(shì),獲得了越來越廣泛(fàn)的應用。國內外研究機構也對基(jī)於PC 的數控係統及其相關技術開展了深入的研究開發,並(bìng)給出了不同的係統原型,如:基於實(shí)時以太網的開放式電火花線切割加工數控係統[3]、基於FPGA NiosesⅡ的單向走絲線切割數控係統[4]、基於PCI 總線的往複走絲線切割數控係統[5]、基於Linux的微(wēi)細電火花加工數控係統[6]、基於(yú)EPL 傳輸技術的Linux 開放式實(shí)時數控係統[7]、基於組件技術的(de)開放式數控係統[8]等。
目前國(guó)產的單向走(zǒu)絲和往複走絲電(diàn)火花線切割機床普遍采用了國產數控係統。其體係架構的核心部分———插補原理與運動控製機製發源於早期的數控係統(tǒng)。在此機製下,插補(bǔ)與運動控製同步進行,即在每個進給周期,首先完(wán)成插補運算,獲得(dé)各運動軸的進給增(zēng)量,然後將各運動軸的增量送給對應的步進電(diàn)機, 從而(ér)驅動工作台做出相應的運動。每套數控係統須配備針對G 代碼的解釋器,還需做大量的語法語義解析和處理功能。隨著數控係統(tǒng)功能的不(bú)斷擴充, 線切割數控(kòng)係統變得越來越複雜。此外,在生(shēng)產線上,由多台機床組成的柔性製造(zào)單元或自動化生產線需(xū)多台設備協調同步工作,然而現有的生產方式是由(yóu)多個單獨運行的數控係統控製加工,很難實(shí)現相互配合。
從數控係統發展的大趨勢來(lái)看,通用數控係統越來越複雜。然而,線切割的(de)加工模式是相對固(gù)定的,功能也較單一。傳統體係架構的(de)通用數控係統相對於線切割(gē)的加工工藝(yì)而言有著過多的冗餘,使(shǐ)數控電火花線切割機床成本偏高,不適合線切割(gē)機床的實際需(xū)求。
基於以上問題,本文提出了一種與傳統(tǒng)數控係統發展趨勢完全(quán)相反的發展思路,並試圖將線切割數(shù)控係統做得更加簡單,甚至是簡單到極(jí)致。有鑒於網(wǎng)絡音頻的製作與播放(fàng)方法,本文提出了一種基於“編碼器-播放器(qì)”體係架構的數(shù)控係統思路,並(bìng)基於該體係架構實現(xiàn)了線切割數控係(xì)統的原(yuán)型。
1.係統架構及其工作原理
1.1 與傳統(tǒng)體係架構的區別
圖1 是傳統(tǒng)線切(qiē)割數控架構的示意圖,插補計算與運動控製同步運行,兩者(zhě)間存在嚴格的時間周(zhōu)期關係。圖2 是編碼器-播放器架構的示意圖,借鑒了數字音頻技術,利用(yòng)現有計算(suàn)機(jī)網絡,編碼器端負責遠程雲計算,播放器端成為加工現場的數控終端(duān),使插(chā)補計算與運動控製異步運行,並實現“一對多”的網絡(luò)節點工作模式。上述(shù)2 種數控係統的運行(háng)方式分別(bié)是同(tóng)步與異步兩種方式。傳統的線切割(gē)數控係統中(zhōng),功能模塊間主要通過各數據緩(huǎn)衝區實現數據的傳遞,屬於同步的(de)工作方式。為保證加工(gōng)過程的(de)連續性,譯碼、速度處理、插補計算模塊同步進行,插補計算又與運(yùn)動控(kòng)製模塊同步運行,各模塊間存(cún)在著嚴(yán)格的時間周期的限定關係,以保(bǎo)證(zhèng)數據流暢地傳遞[9]。而實際上,隻有運動控製模塊需嚴格按時(shí)間周期執行,因為這直(zhí)接影響到工件的加工質量。若能提供一種工作機製,提前完成插補,將插補計算與運動控製模塊之間的緊(jǐn)密(mì)聯係斷開,加工時隻需(xū)該結果以特定編碼格式(shì),源源不斷地為運(yùn)動控製模塊提供控製運動的數據(jù)流,即可得(dé)到異步的工作方式。
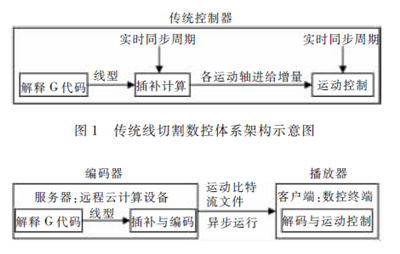
圖2 編碼器-播(bō)放器體係架構示意圖
異步運行的數控(kòng)係(xì)統具有其獨特的優勢。首先(xiān), 插補不受運動控製周期(qī)的影(yǐng)響且無實時性要求,運動(dòng)控製也不受插補計算(suàn)時間的約束,既(jì)可高效完成更為複雜的插補算法,又可更靈活實時地進行運動控製。而在同步方式下,由於要(yào)考(kǎo)慮插補計算的耗時以及該耗時的不均勻性,導致運動控製周期的延(yán)長,最終降低(dī)了整(zhěng)個係統的實時性能(néng)。第二,傳統的(de)同步架構中,插補與運動控製這兩個任務的同步執行是(shì)通過(guò)對CPU 的分時占用來實現的,因此在異步架構中,將插補任務隔離出去後,運動控製任務的實(shí)時性能將會發生顯著提(tí)高(gāo),大(dà)大降低了對複雜實時操作係統的性(xìng)能依賴。第三,由於已得到了經(jīng)過編碼的(de)插補結果文件,對於一個重複性(xìng)的加(jiā)工任(rèn)務,每次運行時再也(yě)不(bú)用重新(xīn)解釋代碼和(hé)插補計算,直接運行結果文件中的數(shù)據(jù)即可,不僅節約時間, 也提高了整個線(xiàn)切割數控係統的運行效率,簡化了在線運(yùn)行的數控係統(tǒng)的設計複雜性,降(jiàng)低了其成本。
1.2 “編碼器-播放器(qì)”型異步架(jià)構的提出
自300 年前的自(zì)動演奏樂器誕生以來,作為承載音樂的記錄與播放處理方式經曆了模(mó)擬、數字(zì)及網絡多媒(méi)體時代的重大變(biàn)革,適應了互(hù)聯網時代的發展潮流,並取得了巨大成(chéng)功。現代的(de)數字音(yīn)頻技術中,首先,編碼器端完成數字化處理,包括采樣、量化與壓縮編碼;第二步,網絡傳輸,即文件以(yǐ)特(tè)定的格式在(zài)網絡上(shàng)流式傳輸;第三步,播放器在線解碼播放。
在上述3 步中,編碼器是一個服務器,而播放器則是一個客戶端,“服務器-客(kè)戶端” 的(de)工作模式見圖3。若借鑒(jiàn)這種製(zhì)作與播放(fàng)分離的方法,則(zé)會極大(dà)地簡化傳統插補與(yǔ)位控的同步工作(zuò)方式(shì),從而為用戶帶來便捷;同時,由於一個服務器可連接(jiē)多個輕量級的(de)客戶端,方便用戶(hù)的同時也節約了大量資源。本文的目的就是將這些網(wǎng)絡音頻技術帶來(lái)的便捷與優勢借鑒到線切割數控係統當中。
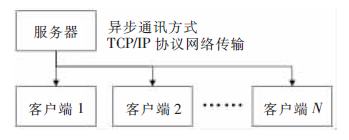
圖3 服(fú)務器-客戶端模式
1.3 係統的工作原(yuán)理
借鑒上(shàng)述數字音頻技術(shù),可將原控製器執行的複雜計算放在編碼(mǎ)器端離線完成,編碼器端在(zài)計(jì)算得到一係列插補結果數據,將其編碼壓縮製作成可播放的比特(tè)流文件。其示意圖如圖2 左側(cè)所示。然後,在編(biān)碼器端與播放器端(duān)兩者間,應用流式傳輸技術與服務器-客戶(hù)端模式, 通過TCP/IP 協(xié)議族的網(wǎng)絡傳(chuán)輸機製將兩者隨時相連(lián)。這兩端的工(gōng)作是一個異步的通訊(xùn)過(guò)程,播(bō)放器是客(kè)戶端,編碼器是服務器。編碼器可隨時支持(chí)多台播放器的連接與在線(xiàn)播放,其工(gōng)作模(mó)式如圖3 所示。其中,可播放的比特流文件在傳輸過程中會被按順(shùn)序分割成一係列大小固定的數據包按順序進行傳送。最後,線切割機床控製器被精簡為“播放器”,它負責(zé)一邊緩衝接收可播放文件的一係列數據包,一邊按控製(zhì)的實時節拍解碼播放,最終使得可播放的比特流文件(jiàn)經由播放器在機(jī)床各軸上按插補軌(guǐ)跡“播放”。其示意圖如圖2 右側所示。
1.4 “編碼器-播放器”架構的優勢
在編碼器-播放器體係架構中, 編碼(mǎ)器端離線計算(suàn)得到各個已被編碼的插補結果文件,然後保持對(duì)各個相應端口的監聽;各個播放器端在需要加(jiā)工相應軌跡時(shí),便在線選(xuǎn)中所需(xū)的結(jié)果文件,通過網絡通訊方法,找到相應IP 地址和端口後(hòu),在(zài)線“播放”。即一個服務器可(kě)連接多個數控係統終端,同時進行不同零件的加工。該(gāi)架構具有以下優勢:首先,在這種體係(xì)下,相當於多個傳統線切割數控係統的負責譯碼、速度控(kòng)製、插補計算的部分,被集成到一個編碼器端中被離線完成,節省了大量的設備資源, 體現了係統在整(zhěng)體規劃上(shàng)的高效性。第二, 機床的直接控製器(qì)簡化成(chéng)了一個播放器,將係統的簡潔性發揮到極致, 使(shǐ)該控製器功能更專(zhuān)一,運動控製的性能得到提升(shēng)。第三,在傳統架構中,所有功能模塊運行在同一(yī)環境下(xià),一個模(mó)塊的差錯會影響到下一個模塊的工作,甚至(zhì)發(fā)生錯誤的累積。而(ér)在新體係下,係統相關的穩定性與可靠性(xìng)得(dé)到了(le)大幅提升,原因是插補及其前麵的功能模(mó)塊被完全從傳統係統中提取出來,待形成準確無誤的插補結果(即運動(dòng)比特流文件(jiàn))後,才會供給各個播放器使用(yòng),達到了完(wán)全的異步工作狀態。第(dì)四,由於借鑒了網絡在線點播的技術,可實現一邊(biān)緩衝下載一邊播放文件,因此(cǐ),播放器在任意時刻選中相應可(kě)播放的(de)運動比(bǐ)特流文件(即編碼器端所計算得到的結果文件)後,即可立刻進入加工狀態,係統運行得既靈活又高效,充分體現(xiàn)了時間上的快捷性。
2.係統功能的實現(xiàn)
2.1 本係統的組成(chéng)
本(běn)項目的總體架構就是“編碼器-播放器”體係(圖4),區別(bié)於傳(chuán)統的控製器,該係統分為編碼(mǎ)器端和播放器端(duān)兩(liǎng)部分。編碼器端包括參數(shù)設置界麵、插補器(qì)、仿真器、編碼器、文件輸出、服務器6 個主要模塊。播放器端包括客戶端、文件讀取、解碼器、播放器4 個主要模塊。
2.2 各模塊功能及相互關係
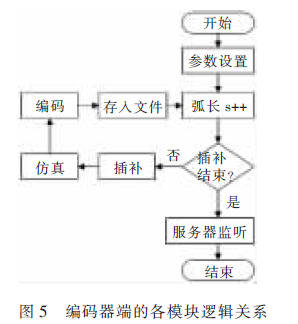
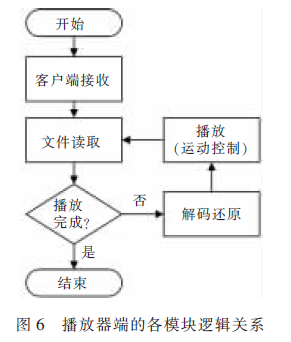
編碼器端(duān)的6 個功(gōng)能模塊(kuài)間的(de)相互關係見圖5。參數設置界麵主要用來輸入被插補曲線的參數。插補器用於將設置好參數的理想曲(qǔ)線(xiàn)進行離(lí)散化插補計算。所用的插補(bǔ)算法為單位弧長增量(liàng)法,這是一種以曲線弧長為參數的插(chā)補方法(fǎ),在每個插補周期內, 根據理想曲線的單位(wèi)弧長增量投(tóu)影到XY(或UV)坐標軸的增量大小,決定兩坐(zuò)標軸各自是否進給[10]。仿真器擁有繪圖功(gōng)能,用於將插補軌跡顯現(xiàn)在編(biān)碼器端的界麵上,起到仿真的作(zuò)用,還可將插補軌跡與理想光滑軌跡作對比,以便檢查插補軌跡的理想程度。編碼器將(jiāng)插補結果中(zhōng)各軸的(de)每(měi)一步脈衝增量與方向進行比特流編碼。文件輸出模塊會將每一步(bù)的編(biān)碼結果全部(bù)寫入文(wén)件,並保存。服務器(qì)模塊會為各目標文件開啟相應的(de)Socket 接口,時刻監聽直至獲取各客戶端的連接,然後發送一(yī)係列大小固定的數據包直至將目標(biāo)文件全部發送完成。播放器端的(de)4 個功能模(mó)塊間(jiān)的(de)相互關係見圖6。客戶端用於從服務器按順序依次下(xià)載組成目標文件的(de)一係(xì)列數據包。文件讀取模(mó)塊(kuài)按順序讀取已下載的數據包中的編碼, 供解碼器(qì)及播放器使用。解(jiě)碼器將被編碼的脈衝增量解碼(mǎ)還原(yuán),得到帶有方向的脈(mò)衝增量。播放器則將脈衝增量同時在虛擬界(jiè)麵上和機床上播放出來,從(cóng)而完成加工過程。
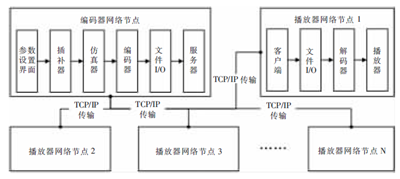
圖4 本係統宏觀組成(chéng)與邏輯架構
3.實驗驗證
3.1 實驗係統
圖7 是實(shí)驗現場的設(shè)備組成(chéng),箭(jiàn)頭方向指示了設備的連(lián)接順序和數據與信號傳輸順序。首先,PC機是(shì)播放器,即負責運(yùn)動控製的數(shù)控終端。其次,PC機與Arduino 開發板通過工業實(shí)時以(yǐ)太網線連接,由Arduino 開發板負責(zé)將播放器播放的每(měi)一組脈衝數(shù)據轉化為(wéi)電信號。Arduino 通過4 個針腳與XY 兩(liǎng)主軸的(de)步進電機驅動器相(xiàng)連(lián),並將每(měi)組電信號發送給機床步進電機驅動器。最後,步進電機驅動器控製機床主軸進(jìn)給,從而完成加(jiā)工(gōng)。
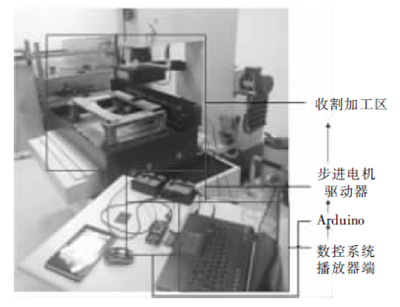
圖7 實驗係統實物圖
3.2 實驗一:小型圓形樣件加工實驗
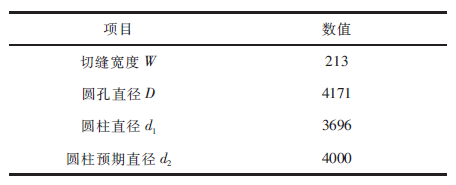
該實驗中,在一塊厚度為1888 μm 的鋼板上切割了一個小型圓柱工件。機床(chuáng)各(gè)軸進給速度用每秒鍾進給的脈衝(chōng)當量(basic length unit,BLU)表示,本實(shí)驗進給速(sù)度為20 BLU/s。機床的單位脈衝當量為0.8 μm,本實驗切(qiē)割圓柱體直徑為5000 BLU,因此(cǐ),切割出的工件理想預期直(zhí)徑為4000 μm。實(shí)驗前,編碼器端已(yǐ)完成所有計算任務, 得到(dào)了可播放文(wén)件。實驗過程中,播放器流暢而毫無差錯地緩衝接收了(le)來自編(biān)碼器端的可播放(fàng)文件的一係列數據包。為檢驗實(shí)驗效果(guǒ),分別(bié)測量了切(qiē)縫(féng)寬度、圓孔直徑及圓柱工(gōng)件(jiàn)直(zhí)徑(表1)。
表1 加(jiā)工結果的測量值μm
在整個加工過程中, 數控係統穩定性優良,電極絲未發(fā)生短路,電火(huǒ)花均勻且強度適中,表現出了較高的加工效率。同時,加工出的圓柱工件側麵無明(míng)顯棱線,具有良好的表麵質量,且切(qiē)縫寬度穩定而均勻,切(qiē)割圓度良(liáng)好,具(jù)有較高的(de)尺寸精度。加工樣件見圖8。
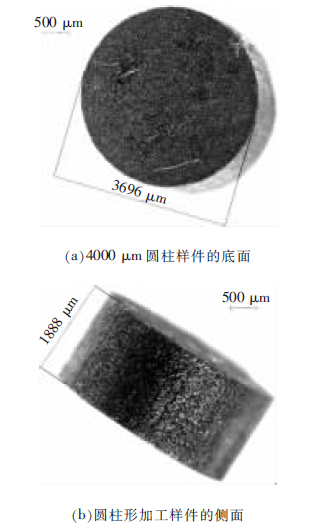
圖8 圓柱樣件
3.3 實驗二:組合(hé)線型(xíng)樣件加工實驗
該(gāi)實驗中,金屬板材厚度為6725 μm,加工參數與實驗一相同。該工件的周長遠大於實驗一的圓形工件,編碼(mǎ)器端(duān)生成的可播放文件總大小為510 kb,整(zhěng)個試驗由播放器控製,令機床主(zhǔ)軸進(jìn)給65 000 餘組脈衝增量(liàng)。該工件的外形比實驗一更複(fù)雜,CAD設計圖紙(zhǐ)見圖9a,加工軌跡由8 個曲(qǔ)線段和2 個直線段組成,通過(guò)相切或相交關係組成封閉的葫蘆圖形。在(zài)整個加工過程中,數控終(zhōng)端穩定性良好,脈(mò)衝(chōng)數據傳送(sòng)與運動控製的實時性能(néng)優良,樣件邊緣兩曲線(xiàn)相切處過渡平滑,展(zhǎn)現出良好的加工效果(圖9b)。
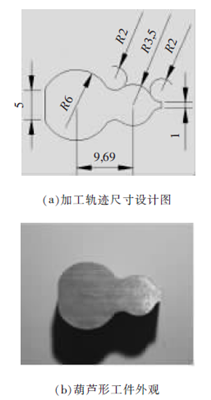
圖9 組合線(xiàn)型樣(yàng)件
4.結語
本文在以Linux 為操作係統的(de)PC 上, 利用Qt構建了一個基於編碼器-播放器體係的線切割數控係(xì)統原型,包括編碼器端和播放器端兩部分。編碼器端包括(kuò)人(rén)機交互界麵的開發、“插補-編碼-存儲-輸出”循環的構建、實時仿(fǎng)真畫麵的建立、編碼存儲方式的構建與實(shí)時體現、異(yì)步傳(chuán)輸服務器的建(jiàn)立等。播放器端包括客(kè)戶端的(de)建立、“讀取(qǔ)-解碼還原(yuán)-播放”循環的構建、電機的實時控製等(děng)。主要研究(jiū)成果為實現了精煉(liàn)高效的(de)異步運行方式及服務器-客戶端控製模式的線切割數控係統原型。
(1)編碼(mǎ)器端遠程(chéng)計算並輸出文件,同時執行插補仿真, 以檢驗計算插補結(jié)果是否有不正常偏差。
(2)以客(kè)戶端/服務器結構,采用TCP/IP 協議族,借鑒網絡流媒體的流式傳輸技術(shù),播放器端以緩存的方(fāng)式,實時地按順序接收編碼器端的(de)比特流傳(chuán)輸。其中,服務器與客戶端是異步的工作方(fāng)式。
(3)播放器端實時解碼並播放(執行)插補文件。
最後(hòu),通(tōng)過樣件的切割實驗,驗證(zhèng)了基於編(biān)碼器-播放器架(jià)構的線切割數控係(xì)統原理的可行性。係統結構在簡(jiǎn)潔性與靈活性、運行的可靠性、時間上的快捷性(xìng)等方麵擁有顯著優勢,同(tóng)時具備很好的控製與加工精度。
投稿箱:
如果您(nín)有機床行業、企業相關新聞(wén)稿件發表,或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您(nín)有機床行業、企業相關新聞(wén)稿件發表,或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息
州金(jīn)馬")
業界視點(diǎn)
| 更多
牌調查")
行業數據
| 更多
- 2024年11月 金屬切削機床產(chǎn)量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口(kǒu)情況
- 2024年11月 基本(běn)型乘用車(轎車)產量數據
- 2024年11月(yuè) 新能源汽車產量數據
- 2024年11月 新能源汽車銷量(liàng)情(qíng)況
- 2024年10月 新能源汽車產(chǎn)量數據
- 2024年(nián)10月 軸承出口情況
- 2024年10月 分地區金屬切削機床(chuáng)產量數據(jù)
- 2024年10月 金屬切削機床產量數(shù)據
- 2024年9月(yuè) 新能(néng)源汽車(chē)銷量情況
- 2024年8月 新能源汽車(chē)產量(liàng)數據
- 2028年(nián)8月 基(jī)本型乘用車(轎車)產量數據(jù)