


基於 PLC 的磨床砂輪動平衡係(xì)統研(yán)究
2020-4-5 來源:浙江大學 化工機械研究所 作者:張誌新,萬可(kě)達,付(fù)豫龍
摘(zhāi)要: 針對目前磨床砂輪動平(píng)衡方式難以(yǐ)同時(shí)滿足易操作(zuò)、高精(jīng)度及低成本的要(yào)求,提出了一種以 PLC 為主機,單片機為從機的(de)新型磨床(chuáng)砂輪(lún)動平衡係統。討論(lùn)了砂輪動平衡係統的整體結構、基於互相關分析的砂輪不平衡量提取、基(jī)於3 平衡塊的不平衡校正方法,以及基於 RS-485 標準數據通信的(de)主從機數據通信。通過搭建模擬(nǐ)砂輪試驗台,驗證了動(dòng)平衡儀的可靠性,取得了良好的平衡效果。
關鍵詞: 磨床; 動平衡; 互相關(guān)分析(xī); 不平衡校正方法; 單片機; PLC; 觸摸屏
砂輪是用磨(mó)料和結合劑樹脂等製成的(de)原型固結磨具,是(shì)磨具(jù)中使用量最大(dà)、使用麵最廣的一種。由(yóu)於長時間的(de)磨削工作導致質量分布不均勻而產生不平衡離心力,引起軸承的振動,影響工件的磨削質量,降低(dī)磨床的(de)使用壽命,因此(cǐ)需要對砂輪進行動平衡。砂輪動平衡(héng)技術按(àn)自動化程度分成 3 大類[1]: 人工平衡,半自動平衡和自動在線平衡。人工平衡受(shòu)平衡架導軌水平(píng)精度、滾動摩擦和裝配誤差的影響,砂輪平衡精度低,花(huā)費時間長。半(bàn)自動平衡需(xū)要通(tōng)用的現(xiàn)場動(dòng)平衡儀作為測試工具(jù),成本高(gāo)、實時性低以及(jí)現場應用不便[2]。
目前自動在線平衡技術成本昂貴,因此,開發出一種新型(xíng)的低成本砂輪現場(chǎng)動平衡測試係統具(jù)有重要(yào)意義課題組研製出一種以 PLC 為主機,單片機為從機的磨床砂輪動(dòng)平衡係統。該係統采用主從(cóng)結構,主機利用 PLC 和觸摸屏(píng),主要實現人機交互與動平衡(héng)過程監控,從機由單片(piàn)機完成數據采(cǎi)集與不平衡量識(shí)別。通過基於 RS-485 標準的數據通信協議實現單片機與PLC 之間的通信,可解決(jué)上述 3 類動平衡方法的缺點(diǎn),具有成(chéng)本低,人機交互性好,通信可靠的優點。
1 、砂輪動平衡係統的整體結構
基於 PLC 的砂輪動平衡(héng)係統的整體結構框圖如圖 1 所示,主要由傳感器模塊、信號處理模塊、單片機模塊和主機控製模塊 4 部分組成。振動傳感(gǎn)器負責(zé)測量砂輪的(de)振動數據,轉速傳感器負責(zé)獲取動平(píng)衡所需的基準信號; 信號處理模塊的功(gōng)能包括信號采(cǎi)集和信號預處理; 單片機 STC12C5410AD 則主要負責數據采集、分析計算[3]; 主機控製模塊包括 PLC 和觸(chù)摸屏,主要負責人機交互和顯(xiǎn)示。PLC 和單片機采用 RS-485接口,采用無協(xié)議通信。
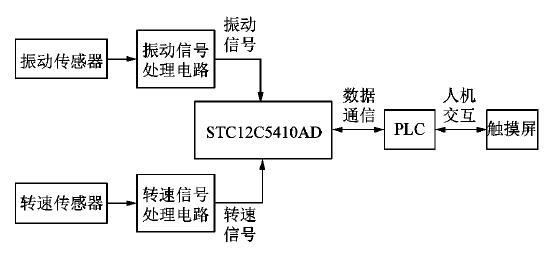
圖 1 砂輪動平衡係統(tǒng)整體結構框圖
整個(gè)動平衡(héng)係統的工作原理(lǐ)如下: 通過觸摸屏控製 PLC 傳送相應(yīng)命令(lìng)給單片機,單(dān)片機根據(jù)接收的命令執行相應(yīng)的動(dòng)作,主要有平衡測試及平衡計算。磁電式速度傳感器吸附在砂輪附近用於(yú)拾取平衡所需的振動信號,光電式轉速傳(chuán)感器對準粘貼有反光標簽的砂輪來拾取平衡所需的基準信號(hào)。振動信號與基準信號經過測量放大、低通濾波(bō)、量程切換和直流偏置等預處理後(hòu)進行 A/D 轉換,單片機(jī)對經過預(yù)處理後的數字信號進行互相關運算、平衡解算,並將計算結果傳送給PLC,再通過觸摸(mō)屏顯示。
2、 不平衡量提取和校正方法
2. 1 砂輪不平衡量提取
引起振動的原因有很多(duō),除了不平衡質量引起(qǐ)的工頻分(fèn)量,還有轉子不(bú)對中引起的(de)二倍(bèi)頻分量、軸承引起的高頻(pín)分量及(jí)隨機噪聲信號。其中,由不平衡量引起的工頻分量是砂輪振動(dòng)的主要來源。振動傳感(gǎn)器拾取的振動信號,可表示(shì)為[5]:
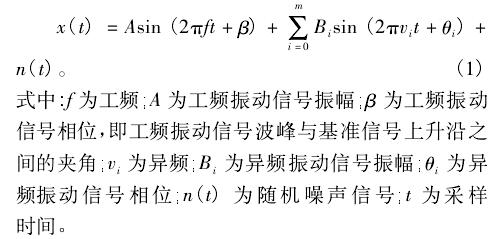
由於計算不平衡量的大小與相位需(xū)要從振動信號中提取工頻分量,課(kè)題(tí)組采用整周期互相關方(fāng)法來處理(lǐ)振動信號。該方法可以消(xiāo)除振動信號中除工頻分量外的絕大部分(fèn)異頻分量,且運算量(liàng)較小,具體過程如下: 以基準信號的任意一個上升沿為起(qǐ)點,從 N 個采樣值中選取 k 個完整周期振動(dòng)信號,將基(jī)準信號的上升沿作為(wéi)零相位。以轉子的工作頻(pín)率 f 為頻率,構造工頻函數:
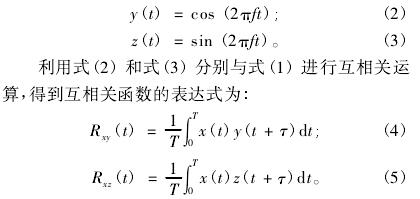
式中: T 為整周期采樣時間; τ 為基(jī)準信號與振動信號的時差。
根據正弦函數係的正交性,振動信號中的異頻分量與 y( t) ,z( t) 進行互(hù)相關(guān)運算後,幅(fú)值為 0,而噪音分量 n( t) 與 y( t) ,z( t) 進行互相關運算後,幅值也(yě)趨於 0。取延時 τ = 0,互相關函數可以近(jìn)似表示(shì)為:
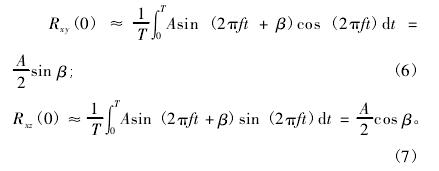
對於實(shí)際測試過程,通常是轉換成離散數字信號進行處(chù)理,隻能通過 N 個采樣值來(lái)計算互相關函數的(de)值,得到(dào)
按照式( 10) 來(lái)分別計算 k 個周期的幅值和相位,取(qǔ)其(qí)平均值(zhí)作為工頻(pín)分量的幅值和初(chū)相位。
2. 2 砂輪(lún)不平衡量校正方法
根據計算結果所指示(shì)的位置[6],在砂輪法蘭盤(pán)環形槽內相(xiàng)對應位置上安裝 2 ~ 3 塊平衡塊( 配質(zhì)量塊) ,每(měi)塊平衡塊(kuài)的質量與形狀(zhuàng)相同。在砂輪動平衡(héng)過程中,為使配質(zhì)量位置準(zhǔn)確,通常在法蘭盤圓(yuán)周上刻上角度值,如圖 2 所示。圖中光(guāng)標位置為平衡塊的角度基準,據此進行平衡塊的(de)調整以達到平衡。由於 2 個平衡塊的平衡裝置的精度和效率低(dī)下,一般工程上法蘭盤采用3 個平衡塊的裝置。本實驗中每個平衡塊(kuài)質量(liàng)為23 g。
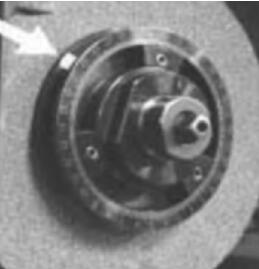
圖 2 3 個平(píng)衡塊的砂輪法蘭盤
采用影響係數法計算出(chū)砂輪原始不平衡量的(de)大小和角度後,首先讓一塊平衡塊(kuài)移動到加(jiā)質量角(jiǎo)度 φ處,然後調整剩餘(yú) 2 個平衡塊使其偏重質量等於加重質量( W) 和單(dān)個平衡塊質量( M) 之差,具體操作見圖(tú) 3。
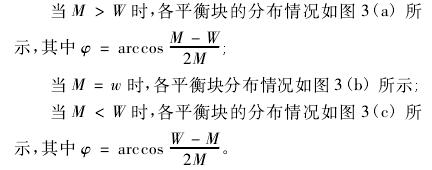
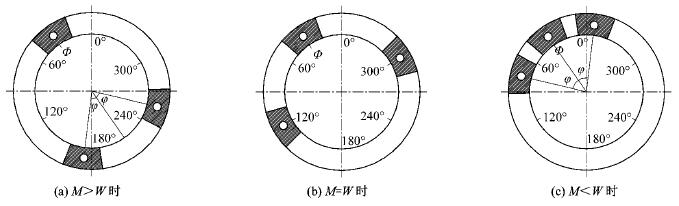
圖 3 平衡塊分布圖(tú)
3 、通信協議
主機 PLC 和單(dān)片機( 從機) 之間(jiān)采用無協議通信方式(shì)與 RS-485 接口進行通信[7-8]。MAX485 芯片 RO和 DI 端分別為接收器的輸出和驅動器的輸入端,分(fèn)別與單(dān)片機的 RXD( 輸入(rù)端) 和 TXD( 輸出(chū)端) 相連即可; MAX485 芯片為半雙工模式,因此隻需要將單片機 的(de)一個引腳(jiǎo)P3. 3與MAX485的接收使能端和輸出(chū)使能端連接來控製 MAX485 的接收(shōu)和發送。PLC 的通信擴展口 FX3G-485BD 的(de) SDA 端子和 RDA 端子短接後與(yǔ) MAX485 芯片的 A 端 子(zǐ) 相連接,SDB 端 子 和RDB 端子短接後與 485 芯片的 B 端子相連接。電(diàn)路連接如圖 4 所示。
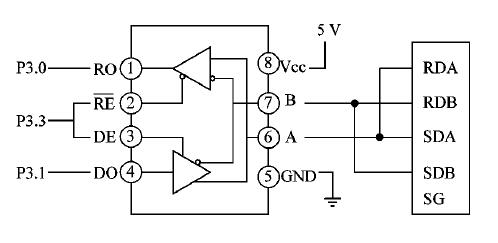
圖 4 通信連接示意圖
無協議通信[9]是僅需要對數據格式(shì)、傳輸速率及起始/停止碼等進行簡單設定(dìng),PLC 與(yǔ)外部設備之間進行直接數據發送(sòng)與接收的通(tōng)信方式,並非通(tōng)信雙方不要協(xié)議。在使用無協議通信時,首先要用到一個 16 位(wèi)的特殊(shū)數據寄存器 D8120 來設置通信格式。D8120 的(de)設置方法如表(biǎo) 1 所示(shì)。本文選取的通信格式如下: 數(shù)據長度為 8 位,無奇偶(ǒu)校驗,1 個停止位(wèi),傳輸速(sù)率為4 800 bit / s,無起始位和結束位,無校驗和,無協議通信 RS-485 接口。對照表 1,可以確定 D8120 的二進製(zhì)值為 0000 1100 0111 0001,對應的十(shí)六(liù)進製數為 0C71。
通過觸摸屏觸發 PLC 發送命令碼(mǎ),單片機接收到命(mìng)令(lìng)後進行數據的采(cǎi)集和保存,然後通過互相關運算進行不平(píng)衡振(zhèn)動識別,進而通過頻譜分析判斷為動平衡(héng)問題(tí)之後,利用(yòng)影響(xiǎng)係數法(fǎ)計算出不平衡量的大小和相位,將其分解(jiě)為 3 個給定質量的平衡塊,最後向PLC 返回計算結果並顯示(shì)在(zài)觸摸屏上(shàng)。命令碼設(shè)置(zhì)如表 2 所示,單片機根據接收到的命令碼進行判(pàn)斷執(zhí)行相應的程序和算法。
表(biǎo) 1 無協議串行通信格(gé)式(shì)

表(biǎo) 2 單片機功能碼設置
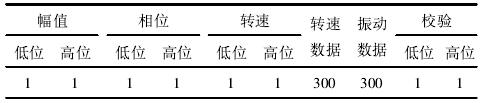
在 PLC 與單片機進行數據通信時,采用命令/響應模式,一次通信收發的一組(zǔ)若幹個字符作為一個信息幀。PLC 發送的(de)幀格式(shì)隻包含命令碼; 當命令為振動測試時,PLC 的接(jiē)收幀由(yóu) 608 個字符組成,如表 3所示。
表(biǎo) 3 振動測(cè)試時 PLC 的接收幀
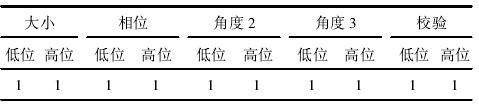
當命令為不平衡量(liàng)計算時,PLC 的接(jiē)收幀由 10 個(gè)字符組成,如(rú)表 4 所示。
表 4 不平衡(héng)量計算時 PLC 的(de)接收幀
本文采用 CRC 校驗方式,PLC 對從單片機傳送回來的數據(jù)進行 CRC 校驗,若校驗成功,則將接收到的(de)數據轉移到其他(tā)寄存器地(dì)址(zhǐ)顯示到觸摸屏(píng)上; 若不成功(gōng),則繼續發送數據(jù)。
4 、係統軟件設計
本係統采(cǎi)用主從機( Master-Slave) 結構(gòu),主機以FX3GA-40MR 為核心(xīn),通過觸摸屏來觸發 PLC,發送(sòng)指(zhǐ)令給 單 片 機 並 接 收 返 回 數 據 進 行(háng) 顯 示(shì)。從 機(jī) 以STC12C5410AD 單(dān)片機[10]為核心,接收(shōu)主機的指令(lìng),完成(chéng)振動與轉速信號的數據采集,由光電傳感器來測量提供轉速和基準信號,磁電式速度傳感(gǎn)器來(lái)測量振動(dòng)信號,測得的信號經過預處理傳入 STC12C5410AD單片機,單片機對信號進行運算,並將計算結果傳輸給PLC。係統的(de)軟(ruǎn)件功能如圖 5 所示。該係統(tǒng)的軟件模塊主要由主從機通信模塊、不平衡計算模塊、數據存儲模塊、人(rén)機交互模塊和(hé)顯(xiǎn)示(shì)模塊組成。通信模塊保證上(shàng)、下位機數據的正(zhèng)常通信,不(bú)平衡計算(suàn)模(mó)塊負責(zé)從采集到的信號中識別出不平衡量(liàng)與相位,數據存(cún)儲模塊負責(zé)保存數據,人機交互控製(zhì)模塊負責相關參數的輸入以及測試係統的開啟與關閉,顯示模塊將計算得到的數據和振動波形顯示到觸摸屏上。PLC、單片機和觸摸屏分別負責不同的模塊。
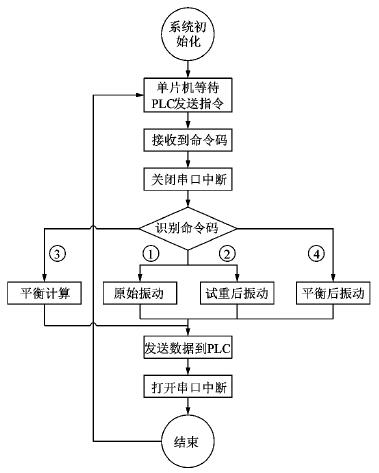
圖 5 係統(tǒng)軟件功能(néng)圖
4. 1 PLC 軟件設計(jì)
PLC 在整個係統中主要進行主動控製,通過 RS指令完成無協議通信。RS 串行通信指(zhǐ)令是用來發送和接(jiē)收串行數據(jù)的指令。指令中的[S]和 m 用來指定發送數據的(de)地址和字節數; [D]和 n 用來指定接收數據的地址和(hé)字節數。基本格式如圖 6 所示。
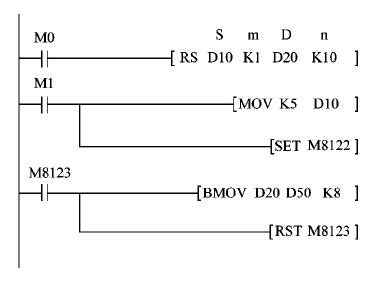
圖 6 無協議通信基本格(gé)式(shì)
4. 2 觸摸屏軟件(jiàn)設計(jì)
課題組采用 EasyBuild8000 軟件對 TK6070iP 觸摸屏進(jìn)行編寫(xiě)設計,該軟件是集編寫、調試與仿(fǎng)真於一體的 WEINVIEW 觸摸屏編程軟件,帶有各種功能元件(jiàn),能夠對 PLC 的寄存器進行實時的控製和顯(xiǎn)示,操(cāo)作簡便(biàn)直觀。觸摸屏主要完成的任務有以(yǐ)下幾點:
1) 觸發原始振動按鈕,得到砂輪的原始振動數據,並跳轉到波形顯示(shì)子界(jiè)麵,對轉速波形和振(zhèn)動波形進(jìn)行監測;
2) 在(zài)砂輪轉(zhuǎn)子上(shàng)加試質量塊(kuài),同時在觸摸屏上輸入試質量塊質量和相位,然後觸發試質(zhì)量振動來獲(huò)取試加質量(liàng)後的振動;
3) 觸發平(píng)衡計算按鈕,計算出不平衡量的大小和相位,並跳轉到平衡塊指示界麵,以圖形的方式直觀地顯示在觸摸屏的界麵上;
4) 最後根據第(dì) 3 步的顯示結果,在砂(shā)輪的對應位置配置平衡塊,然(rán)後觸發平衡振動測試平衡後振動(dòng),並顯示(shì)動平衡效果與振動下降率。根據上(shàng)述任務,設計完成整個動平衡過(guò)程的人(rén)機交(jiāo)互主界麵,如圖(tú) 7 所示。
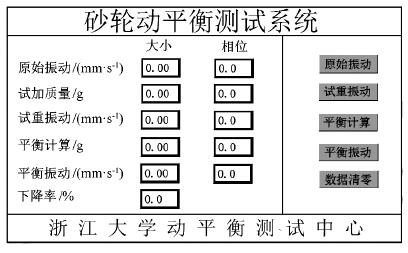
圖 7 動(dòng)平(píng)衡測試係(xì)統(tǒng)主界麵(miàn)
4. 3 單片機(jī)軟件(jiàn)設計
單片機初始(shǐ)化之後被置於接收(shōu)等待狀態(tài),一旦接收到 PLC 的數據後就關閉串口中斷,根據接收到的SBUF 中的命令(lìng)碼執行相應的功能(néng),完成後返回數據給 PLC,重新打開串口中斷,等待下次接(jiē)收數據。在通信程序中,MAX485 芯片是半雙工工作模(mó)式,發送和(hé)接收不能同時進行,所以必須用單片機 P3. 3 引腳控製 MAX485 芯片的收發。在初始化時將 P3. 3置低,MAX485 芯片(piàn)處於接收狀態,在(zài)收到數據之後關閉串口中斷,同時將 P3. 3 置高,經過後(hòu)續的(de)運算之後發送數據,然後再將 P3. 3 置低,如(rú)此再進行下(xià)一次的數據傳輸。
5 、實驗
將砂(shā)輪動平衡測控係統應用於實驗室的模擬砂輪試驗台,如圖 8 所示(shì)。
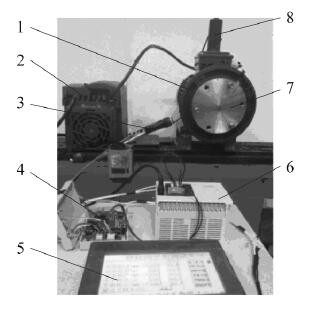
1—電機; 2—變頻器; 3—光電傳感器; 4—從機電路板(bǎn); 5—觸摸
屏; 6—PLC; 7—法蘭盤; 8—振動傳感器。
圖 8 砂輪動平衡係統測試
使用質量為 5. 2 g 的質量塊作試(shì)加(jiā)質(zhì)量,進行(háng) 3次動平衡實驗,實驗數據如表 5 所示(shì)。由實驗數據可知(zhī): 經過平(píng)衡計算得到的不平衡(héng)量的大小和相位(wèi)基本保持一致; 砂輪磨床動(dòng)平衡係統平衡精度高,平衡效果好,可以滿足(zú)實際生產需求。
表 5 動平衡實驗數據

6 、結語
課題組提出了一種(zhǒng)基(jī)於 PLC 的磨床砂(shā)輪動平衡機係統,並通過模擬砂輪試驗台,證明了該(gāi)方案是(shì)可(kě)行的。相比之下,現有的磨床砂輪半自動化平(píng)衡通常需(xū)要利用一台動(dòng)平衡儀來巡檢,效率和實時性較低,而自動在線動平衡係統價格高昂,中小型磨床廠(chǎng)難以承受。文中所設(shè)計的砂輪(lún)動平衡機(jī)係統具有人機交互性好、結構簡單、通信可靠和價格低廉(lián)的優點,因此,該係統在磨床砂(shā)輪動(dòng)平衡中有很好的應用前景。
投稿箱:
如果您有機床行業、企業相關新聞(wén)稿件發表,或進行資訊合作,歡迎聯係本網(wǎng)編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞(wén)稿件發表,或進行資訊合作,歡迎聯係本網(wǎng)編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息
州(zhōu)金馬")
業界視點
| 更(gèng)多
牌調查")
行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年(nián)11月 分地(dì)區金屬切(qiē)削(xuē)機床產(chǎn)量數(shù)據
- 2024年11月 軸承出口情(qíng)況
- 2024年11月(yuè) 基本型乘(chéng)用車(轎(jiào)車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月(yuè) 新能(néng)源汽車銷(xiāo)量情況
- 2024年10月 新能源汽車產(chǎn)量數據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分地區金屬(shǔ)切削機床產量數據
- 2024年10月(yuè) 金屬切削機(jī)床產量數據
- 2024年9月 新能源汽車銷量情(qíng)況(kuàng)
- 2024年8月 新能源(yuán)汽車產(chǎn)量數據
- 2028年8月(yuè) 基本型乘用車(轎車)產量數據