


基於半閉環進給係統的水刀(dāo)機床建模與仿真研究
2015-8-28 來源:數控機(jī)床市場網 作者:楊誌君 馬詮和 趙不賄 陳波
楊誌君1,馬詮和2,趙不賄1,陳波(bō)2
(1. 江(jiāng)蘇大學電氣信(xìn)息工(gōng)程學院,江蘇(sū)鎮江 212013;
2. 南京大地水刀股份有限公司,江蘇南京 211300)
摘要: 以某公司生產的半閉環控製的懸臂式水(shuǐ)切割機床 DWJ2030_FB 為分析對象,建(jiàn)立其簡化(huà)數學(xué)模型,對影響機床運行性能的轉動(dòng)慣量比、反向間隙及傳動機構剛性進行了仿真分析,同時利用安川 SigmaWin + 軟件(jiàn)和 Renishaw 激光幹涉儀對分析結果進行了測(cè)試驗證(zhèng)。仿真及試驗結果表明: 降低進給軸的轉動慣量比有利於提高係統動態(tài)響應及穩定性(xìng),轉動慣量比接近或小於 1 時為最佳(jiā); 滾珠絲杠反向間(jiān)隙是機(jī)床定位精度降低、產生輪廓誤差的因素之(zhī)一,采用激光幹涉儀補償可有效降低反向間隙的影響(xiǎng); 傳動(dòng)機構剛性的增大有利於係統響應性、定位精(jīng)度和穩定性的提升,而剛度達到一定值時,則不能再通過剛度的提高來提升係統性(xìng)能。
關鍵(jiàn)詞: 超高壓水射流; 機床控製(zhì); 轉動慣量比; 反(fǎn)向間隙; 剛性
0 前(qián)言
進給(gěi)驅動係統是數(shù)控機床最為重要的組成部分,它的性能指標(biāo)在一定(dìng)程(chéng)度(dù)上直接決定了機床的靜(jìng)態、動態特性,在高速、高精度、多軸聯動(dòng)等場合顯得尤為突出。與普通數控機(jī)床(chuáng)相比,水切割速度快、柔(róu)性好、懸臂及(jí)龍門結構能滿足各類(lèi)切割尺寸,但其切割精度並不高。對於半閉環結構的水刀機床,其進給係統在機械傳動部分無檢測元件(jiàn)和反饋環節,當負載(zǎi)特性、外界幹擾、摩擦(cā)等非線性因素作用於(yú)滾珠絲杠、導軌等(děng)機械傳(chuán)動機構(gòu)時,將直接影響到機(jī)床的動態響(xiǎng)應性、穩定(dìng)性、尺寸及輪廓精度等。因此分析各類非線性(xìng)因素的影響,將有(yǒu)助於提高半閉環結構水刀機床的整體性能(néng)。
1 水刀機床進給係統建模
1. 1 半閉環控製的進給係統原理
圖 1 為大地水刀懸(xuán)臂(bì)式機床產品 DWJ2030_ FB,主要由 ESA 數控係統,安川∑- Ⅴ係列交流伺服驅(qū)動器(qì)及伺服電機構成(chéng)的半閉環控製結(jié)構,其進給係統原理框圖如圖 2 所(suǒ)示。CNC 一方麵進行插(chā)補處理、發送控製信號,另一方麵接收驅動器從(cóng)電機編碼(mǎ)器反饋回來的位(wèi)置信號,進行(háng)比(bǐ)較補償處理; 伺服單元將CNC 發(fā)送的電信號轉換成(chéng)電機軸上(shàng)的角速(sù)度輸出,同時接收來(lái)自電機編碼器的速(sù)度和(hé)位置反饋; 機械傳動機構則通(tōng)過滾珠絲杠、皮帶等裝置將電機的旋(xuán)轉運(yùn)動轉換成直線(xiàn)位移輸出。
刀懸臂式機床")
1. 2 數控係統的(de)數學模型
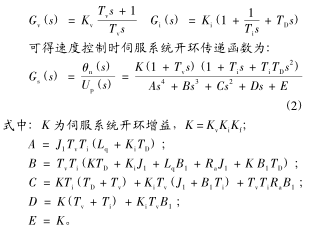
機床的控製方式主要分為: 位置控(kòng)製、速度控製和扭矩控製(zhì)。半閉環係統常用速度(dù)控(kòng)製方式,由CNC 發送 -10 ~ + 10 V 的(de)模擬量(liàng)電壓來控製各軸移(yí)位; 給出了速度控製時 CNC 與伺(sì)服單(dān)元的連接控製圖,在不考慮(lǜ)轉矩前饋等因素時可將CNC 簡化為一個位置控製單元,傳遞函數可用一(yī)個(gè)比例係數 KP來代替,結構框圖如圖 3 所示。

1. 3 速(sù)度控製時(shí)伺服單元的數學模型
伺服單(dān)元包括伺服驅動器和伺服電機,其(qí)自(zì)身由(yóu)電(diàn)流環、速度環和位置環構成一個(gè)全閉環控製係統。速(sù)度控製(zhì)時(shí)處於最外層的位置環不起作用,由 CNC代替,CNC 將插補指令轉變成(chéng)模擬電壓指令後直接傳送(sòng)至速度環。速度環的作用是增強係統抗負載擾動(dòng)的能(néng)力,抑製速度波(bō)動,它由速度前向濾(lǜ)波器、速度調節器、速(sù)度反饋構成。電流環處於最內層,它是(shì)提高伺服控製係統精度和響應速度、改(gǎi)善控製性能的關鍵,由電流(liú)前向濾波器、電流調節器、矢量控製算法和電流反饋構成。
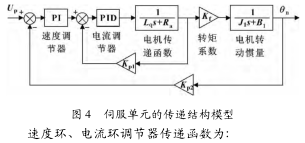
給出(chū)了速度控製時伺服係統的典型五階模型,包括速度環、電流環以(yǐ)及交流伺服電機的數學模型,利用極點配置的方法給出了伺服係統在高速運(yùn)行特性下的四階(jiē)模型。由於實際伺服單元各(gè)環(huán)節具有非線性(xìng)、時(shí)變、機電耦合等關係,因此在工程實際研究中,可忽(hū)略各環節的反饋(kuì)、濾波等影響,將速度環、電流(liú)環分別簡化成 PI和 PID 控製器,結構框圖如圖 4 所示。
1. 4 機械傳動結構的數學模型
在 DWJ2030_FB 懸臂機床上,傳動方(fāng)式包括直連(x 軸) 和皮帶傳動 (y 軸) 兩類形(xíng)式,圖 5 所示為(wéi)皮帶傳動結構方(fāng)式,以下建模以該類(lèi)型傳動方(fāng)式為(wéi)例(lì)。
圖 5 皮帶(dài)傳動方(fāng)式結構
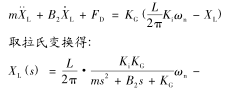
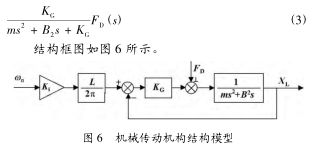
機械傳動和執行(háng)單元的輸入為電機的角位(wèi)移 ωn,輸出為移動工作台的直線運動 XL,其機械係統(tǒng)動力學平衡方程為:
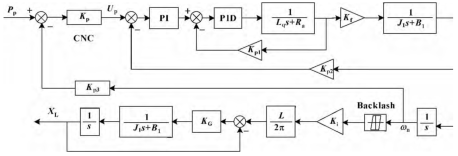
1. 5 DWJ2030_FB 懸臂機床(chuáng)單軸進給係(xì)統仿真模型
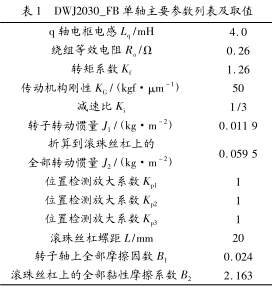
由於(yú)水切割為非接觸式的冷(lěng)態(tài)切(qiē)割(gē)方式,即刀頭與工件不接觸,在(zài)忽略水對刀頭的反作用(yòng)力(lì)之後,可等效認為加工時工件(jiàn)對工(gōng)作台的反作用力 FD為 0。同時,為(wéi)便於仿真比較轉動慣量的影響,將工作台的重量(liàng)等效成為折算到滾珠絲杠上的負載慣量 J2。綜合公式 (1) (2) (3),便可(kě)得到如圖 7 所示的機床(chuáng)單軸進給係統仿真模型,表1 為其主要參數列表及取(qǔ)值。
2 仿真(zhēn)分析
半閉環結構的機(jī)床進給(gěi)係統在機械(xiè)傳(chuán)動部分無檢測元件和反饋環節,受負載特性、外界(jiè)幹擾等非線性因(yīn)素(sù)影響較大,從而直接影(yǐng)響到(dào)機床性能,因此必須考慮作(zuò)用於機械(xiè)傳動機構上的各因素影響。
2. 1 轉動慣量比(bǐ)
通過傳動機構折算(suàn)到滾(gǔn)珠絲(sī)杠上的(de)負載慣量 JL與電機軸轉子慣量 Jm的比值即為轉(zhuǎn)動慣量比。同傳動方式下(xià),負載越重,折算到滾珠絲(sī)杠上的(de)負載慣量 JL也越大。由於 Jm為一定值(zhí),即可通過模擬改變JL來分析二者的關係,仿真時負載慣量 JL分(fèn)別取0. 5、1、2、3、5 倍的轉子慣量 Jm,所得仿真波形如圖 8 所示。
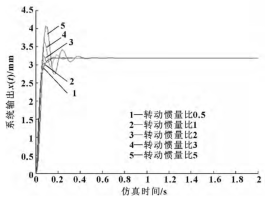
由仿真波形可(kě)得: 轉動慣量比越大,係統越不穩定,超調量 σ、上升時間(jiān) tr和調整時間 ts均逐(zhú)漸增大,使係統啟動響應延遲、調(diào)整時間長(zhǎng); 轉動慣量比越小,係統的動態響應特性越好且越(yuè)容易穩定,當轉動慣量比小於一定值時,係統的階躍(yuè)響應特性基本不變; 因(yīn)此(cǐ)對(duì)於高響應(yīng)要求(qiú)的機床(chuáng),在設計時應盡量減輕橫梁等工作台的負(fù)重,以減小折算到絲杠上的負(fù)載(zǎi)慣量,JL/Jm接近或小於 1 為(wéi)最佳; 同時要考慮(lǜ)與(yǔ)電機轉子慣量的匹配,從而提高機床的動態響應性和跟隨性。
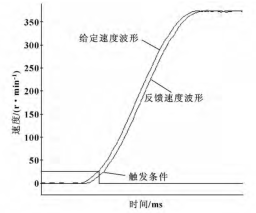
(0. 95) 後利用(yòng)安川 SigmaWin + 軟件實測放大的機床y 軸啟動特(tè)性轉速曲線,其上升轉速平滑,反饋轉速(sù)跟隨性較好(hǎo),無超調(diào),動態響應較快。試驗還(hái)發現:當未(wèi)能正確估(gū)測機床各軸轉動慣量比或對(duì)於負載慣量較大的進給軸,其快速運行(háng)時(shí)會產生一定的軸振動。通常對於電(diàn)機轉子與滾珠絲杠由聯軸器直接相連的傳動方(fāng)式,其負載慣量將全部折算至絲杠(gàng)上,導致轉動慣(guàn)量(liàng)比增大。而利用減速機和皮帶傳動的組合(hé),折算至滾珠絲杠上的負載慣量將(jiāng)按減速比的平方次(cì)削減。因(yīn)此(cǐ),在大負載的機(jī)床上,為降低負載重量對機床性能的影(yǐng)響,可廣泛應用帶減速機與皮帶的傳動方式。
2. 2 反向間隙
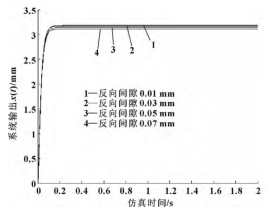
對於完全沒有間隙(xì)的結構,機床的(de)磨損將是(shì)非常嚴重的,因此(cǐ)傳動過程中往往會留有較小的間隙,為分析間隙(xì)對進給係統的影響,特別是對最主要的滾珠絲杠反(fǎn)向間隙進(jìn)行研究分析,仿真時(shí)在模型中引入間隙模塊 Backlash,反向間隙值分別取 0. 01,0. 03,0. 05,0. 07 mm,所(suǒ)得波形如圖 10 所示。
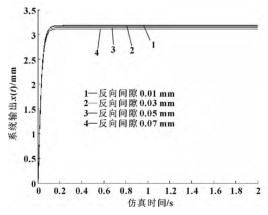
顯然,當反向間隙從(cóng) 0. 01 mm 至 0. 07 mm 變化時工作台移位曲線滯(zhì)後也越來越明顯,與實際定位點的偏差加大,工(gōng)作台輸出位移的位置誤差增加,定位(wèi)精度降低。若機床進行輪廓加工時,過大的反向間隙(xì)更會影響(xiǎng)切割質量(liàng)。
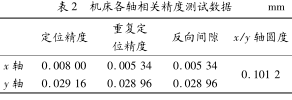
表 2 為利用雷尼紹(shào)激光幹涉儀實測的 DWJ2030_FB 機床 x、y 軸相關精度,各軸通過激光間隙補償、螺距補償,有效地消除了滾珠絲杠反向間隙的影響,重複定位精度較未補償前的定位精度得到了提高,精度標準(zhǔn)均滿足公司設備(bèi)出廠檢(jiǎn)驗標準,因此相比利用全閉環結構提高傳動精(jīng)度,半閉環係統采用(yòng)激光幹涉儀補(bǔ)償是消除間隙、提高精度最(zuì)為有效簡便的方法。
2.3 傳動機(jī)構剛(gāng)性
剛(gāng)性為機(jī)械剛度的(de)指標,滾珠絲杠的剛性取決於絲杠與螺母間軸向負荷(hé)珠槽接觸剛性及絲杠軸的剛性。為分析傳動機構剛性對進給係(xì)統的影響,仿真(zhēn)時將各類剛性簡化成為一個傳動機構總(zǒng)剛性 KG,分(fèn)別取值為 50、100、200、300、400 kgf/μm,所得波形如圖 11 所示。
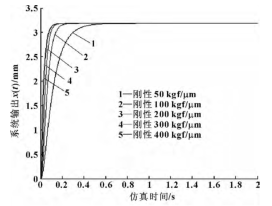
顯然,傳動(dòng)機構剛性的增(zēng)大可提高係統(tǒng)的響應特性,縮短穩定時間,減少係(xì)統的隨動誤差,從而提高係統的定位精度(dù),同時(shí)機床抗幹擾的能力也越強,穩定性越高,當剛度達到 300 ~400 kgf/μm 時,係統的階躍響應(yīng)特性基本保持(chí)不變,可見當機構剛度達到一定(dìng)值時,不能再通過剛度的提高來(lái)提升係統(tǒng)性能。表2 中 x 軸為直連形式,與 y 軸皮帶傳動相比剛度較大,因此無(wú)論(lùn)其定位精度還是重複定位精(jīng)度均優於 y 軸,同時通過激光幹涉儀補償後,重複定位精度較未補償前的定(dìng)位精度得到明顯提升,可見剛性較小時產生的較大彈性形變容易造成定位(wèi)偏差。因此,直連傳動和(hé)通過減速機與皮帶傳動兩類形(xíng)式各(gè)有優劣,設計安裝時(shí)應(yīng)綜合考慮、折中選取、盡量提高各環節的剛(gāng)性。
3 結束語
以南京大地水刀有限公司生產的半閉環懸臂式水切割機床 DWJ2030_FB 為例,構建了該機床的半閉環控製簡化數學(xué)模型,並利用 Matlab/Simulink 仿真模塊對機床(chuáng)轉動慣量比、反向間隙、傳動(dòng)機構剛性(xìng)進行了仿真與驗證,分析了這些因素作用於半閉環進給(gěi)係(xì)統不可控部分時的影響以及解決方法,對提高半閉環控製係統的(de)性能(néng)、機械傳動部分的選型和設計,提供了較強的(de)理論參考依據。
投稿箱(xiāng):
如果您有機床行(háng)業、企業相關新聞稿件發表(biǎo),或進行資訊合(hé)作(zuò),歡(huān)迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
如果您有機床行(háng)業、企業相關新聞稿件發表(biǎo),或進行資訊合(hé)作(zuò),歡(huān)迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界(jiè)視點
| 更多
牌調查")
行業數據
| 更多
- 2024年11月 金屬切(qiē)削機床產量數據
- 2024年11月 分地(dì)區金屬切削機床產量數(shù)據
- 2024年11月 軸承出口情況(kuàng)
- 2024年11月 基本型乘用車(轎(jiào)車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年(nián)11月 新能源汽(qì)車銷量(liàng)情況
- 2024年10月 新能源汽(qì)車產量數據(jù)
- 2024年10月 軸承出口情況
- 2024年10月 分地(dì)區(qū)金屬切削機床產量數據
- 2024年10月 金屬切削機(jī)床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據(jù)
- 2028年8月 基本型乘用車(轎車)產量數據