機床")



七軸工業機器人 VS 六軸工業機器人,強在哪?
2021-12-17 來(lái)源:- 作者:-
近年來,跨國機(jī)器人巨頭們紛紛推出七軸工業機(jī)器人,以搶占高端新市場,這引發了我們對於七軸工業機器人的深入思考,它具有哪些獨特的技術優勢,存在哪些(xiē)研發(fā)難點,近年來國際上發布了哪(nǎ)些(xiē)工業七軸機器人產品,我(wǒ)國七軸工業(yè)機器人的研發及產業化又進入了哪一階段?
工業(yè)機器人到(dào)底應該有幾個軸?
目前,工業機器人已經被廣泛應用於各行各業,但我們也發現,工業機器人不僅形狀各異,其軸數也(yě)各(gè)不相同。所謂工業機器人的軸,可以用專業的名詞自由度來解釋,如果機器人具有三(sān)個自由度,那麽它可以沿(yán)x,y,z軸自由的運動,但(dàn)是它卻不能(néng)傾斜(xié)或者轉動。當機器人的軸數增加,對機器(qì)人而言,就是更高(gāo)的靈活性。那麽工業機器人應該有幾個軸(zhóu)才合理(lǐ)呢?
三軸機器人也被稱為直角坐標(biāo)或者笛卡爾(ěr)機器人,它的三個軸可以允許機器人沿三個軸的(de)方向進行運動,這種機器(qì)人一般被用於簡單的搬運工作之中。
四軸機器(qì)人,可以沿著(zhe)x,y,z軸進(jìn)行轉動,與(yǔ)三軸機器人不同的是,它具有一個獨立運動的第四(sì)軸,一般來說scara機器人就可以被認為是四(sì)軸機器人。
五軸是許多工業機器人的配置,這些機器人可以(yǐ)通過x,y,z三個空間周進行轉(zhuǎn)動,同(tóng)時可以依(yī)靠基座(zuò)上的軸實現轉身的動作,以及手部可以靈活轉動的軸,增加(jiā)了其(qí)靈活性(xìng)。
六軸機(jī)器人(rén)可以穿過x,y,z軸,同時每個軸可以獨立轉動,與五軸機器(qì)人的最大區別就是,多了一個可以自由轉動的軸。六軸機器人的代表就是優傲機器人,通過機器人身上的藍色蓋子,你可以很清楚的(de)計算出機器人的軸數。
七軸機(jī)器(qì)人,又稱為冗餘機器人,相比六軸機器人額外的軸允許機器人躲避某些特定的目標,便於末端執行器到達特定的位置(zhì),可以更加靈活的適應某些特殊工作環境。
隨著(zhe)軸數的增加,機器人的靈活性也隨之增長。但是,在目前的工業(yè)應用中(zhōng),用得最多的是三軸、四軸和六軸的工業機器人,這是因為,在某些應用中,並不(bú)需要很高的靈活性,而三軸和四軸機器人具有(yǒu)更高的成本效益,並且三軸和四軸(zhóu)機器人在(zài)速度(dù)上也(yě)具有很大的優勢。
未來,在需要高靈活(huó)性的3C產業,七軸工(gōng)業機器人將擁有用武之地,隨著(zhe)其精(jīng)度不(bú)斷增加,在不遠的將來,它將取(qǔ)代(dài)人工(gōng)進行裝配手機等精密電子產品。
七軸工業機器人比六軸工業機器人
強在哪?
從技術上來看,六軸工(gōng)業機器人存在什麽問題(tí),七軸工業機器人又強在哪?
(1)改善(shàn)運動學特性
在機器人(rén)的運動(dòng)學問題中(zhōng),三個問題使得(dé)機器人的運動受到非常大的限製。
第一是奇異構(gòu)型。當機器人(rén)處於奇異構型時,它的末端執行(háng)器不(bú)能(néng)繞某個方向進行(háng)運動,或者施加力矩,因而奇異構型極大的影響了運動規劃。
六(liù)軸機器人第六軸和第(dì)四軸共(gòng)線發生奇異
第二是關節位移超限。在真實工作情況下,機器人每(měi)個關節的運動的角度範圍是受到限製的,最理想的(de)狀態(tài)是正負180度,但(dàn)是很多關節是做不到的。另外,七軸機器人(rén)可以避免角(jiǎo)速度運動過快,讓(ràng)角速度分配得比較均勻(yún)。
新鬆七軸機(jī)器人各軸運動(dòng)範圍及最大(dà)角速度
第三是工作環境中(zhōng)存(cún)在障礙。在工業環境(jìng)下,很多場合存在各種環境障礙(ài),傳統的六軸機器人(rén)無法隻(zhī)改變末端機構的姿態,而不改(gǎi)變末端機構的位置。
(2)改善動力學特性
對(duì)於七軸機器人而言,利(lì)用其冗餘(yú)自由度不僅可以通過運動軌跡規劃達到良好的運(yùn)動學(xué)特性,並(bìng)且我們可以利用其結構(gòu)實現最佳的動力學性能。
七軸機器(qì)人可實現關(guān)節力矩的再分配,這裏涉及到機器人的靜力平衡的問題,也就是說,作用在末端的力,通過一定的算法算出每個關節承受(shòu)的力有多大。對於傳 統的六軸機(jī)器(qì)人來說,其每個關(guān)節的(de)力是(shì)一定的,它的(de)分配可能很不合理。但(dàn)是對於七軸機器人(rén)來說,我們可以通過控製算法調整各個關節的力矩,讓薄弱的環節承 受的力矩盡量小,是整個機器人的力矩分配比較(jiào)均勻,更加合(hé)理。
(3) 容錯性
機器人在發生故障時,如果有一關節失效,傳(chuán)統六軸機器人便無法繼續完成工作,而七軸機器人可以通過重新調整故障關節速度(運動學容錯)和故障關節力矩(動力學容錯)的再分配(pèi)實現(xiàn)繼續正常工作。
國際巨(jù)頭們的七軸工業機器人產品
無論從(cóng)產品角(jiǎo)度,還是從應用角度,七軸工業機器人目前(qián)都還處於初步(bù)發展階段,但各大廠商紛紛在各大展覽會力推相關產品(pǐn),可以(yǐ)想(xiǎng)見對其未來的發展潛力還是十分看好的。
- 庫卡LBR iiwa
2014年11月,庫卡在中國國際工業博(bó)覽會機器人(rén)展(zhǎn)上首次(cì)發布kuka第一款七自由度(dù)輕型靈(líng)敏機(jī)器(qì)人LBRiiwa。
LBRiiwa七軸機器人基於人類手臂(bì)進行(háng)設計,其結合集成的傳感(gǎn)器係統(tǒng),使該輕型機(jī)器人具(jù)有可編程的靈敏性(xìng),並使(shǐ)其具備了非常高的精確度。而七軸(zhóu)的LBRiiwa所有的軸內均配備高性能(néng)碰(pèng)撞檢測功能、集成的(de)關節力矩傳感器,以實現(xiàn)人(rén)機協作。
七(qī)軸的設(shè)計,使得KUKA的該款(kuǎn)產品有(yǒu)較高的靈活度,可輕鬆地越過障礙物。LBRiiwa機器人的結構采用鋁製材料設計,其自身重量隻有23.9千克。其(qí)負(fù)荷有兩種,分別為(wéi)7千克和14千克,使其成(chéng)為首款負荷超過10千克的輕型機器人的產品。
- ABB YuMi
2015年4月13日,abb在德國漢諾威工業博覽會上(shàng)正式向市場推(tuī)出全球首(shǒu)款真正實現人機協作的雙臂(bì)工業機器人YuMi。

YuMi每個單臂(bì)均(jun1)為(wéi)七個自由度,機身重量為38千克。其每條手臂的負載(zǎi)為0.5千克,重(chóng)複定位精度可(kě)達到0.02毫米,因(yīn)此特別適合小件裝配、消費品、玩具(jù)等領 域。從機械手表的精密部件,到手機(jī)、平板(bǎn)電腦,以及台式電腦零件的處理,對於(yú)YuMi來說都不在話下,而這正體現出該款冗餘度機器人表現出的擴大可達工作 空間、靈活敏捷、精確等種種優良特性。
- 安川(chuān)莫托曼SIA
日本知名機器人製造商,“四大(dà)家族”之(zhī)一的安川電機也發布了多款七軸機(jī)器(qì)人產品。其中SIA係列機器人是輕型敏捷型(xíng)七(qī)軸機器人,該係列機器人能夠提供類人 的靈活性,並且能夠快速加速。該係列機器人(rén)采用輕量化和流線型設計(jì),使其非常適合安裝在狹小(xiǎo)的空間內。SIA係列可提供較高的有效載荷(5千克至50千(qiān) 克)以及(jí)較(jiào)大的工作範圍(559毫米至1630毫米),很適合從事裝配、注塑、檢驗等操作。
除(chú)了輕型七軸機器人產品外,安川還發布(bù)了(le)七軸機器人焊接係統,其高自由度能夠盡最大可能保持最適合的姿態(tài)以(yǐ)實現高品質的焊接效果,特別適合內麵的焊接(jiē),達到(dào)最佳的接近位置(zhì)。並且該產品能夠(gòu)高(gāo)密度布局,容易回避其(qí)與軸和(hé)工(gōng)件之間的幹擾,顯示出其優良的避障功能。
- 那智不二越PrestoMR20
早在2007年底,那智不二越(yuè)便開發出七自由度的機器人“PrestoMR20”。通過采用七軸設計,使得機器(qì)人能夠像模仿人(rén)類手臂那(nà)樣執行更加複雜的工 作流程,在(zài)狹窄的工作(zuò)區域運動。另外,機器人前端部分(手腕)的扭(niǔ)矩(jǔ)增加到(dào)了原來傳(chuán)統六軸機器人的約兩(liǎng)倍左右,標準配置的扭矩為(wéi)20千克,通過設定動作範圍,最大可搬運30千克的物品,工作範圍達到1260毫米,重複定位精(jīng)度為0.1毫米。通過采用七軸結構,MR20在(zài)機床上(shàng)取放工(gōng)件時可從機床側麵進行作 業。這樣一來,就提(tí)高了事前準(zhǔn)備和維(wéi)護(hù)等作業(yè)效率。機床間的空間能夠縮小至傳統六軸機器人的(de)一半以下。

除此之外,那(nà)智不二(èr)越(yuè)還發布了MR35(負載為35千克)、MR50(負載為50千克)兩款可在狹小空間(jiān)和有障礙物場所(suǒ)的應用場合使用的工業機器人。
- OTC七軸工業機器人
日(rì)本DAIHEN集團歐地希推出了最新的七軸機器人(rén)(FD-B4S、FD-B4LS、FD-V6S、FD-V6LS、FD-V20S)。由於有(yǒu)第七軸的回 轉,它們可以實現像人的手腕一(yī)樣的扭(niǔ)轉動作,能夠實現一周以上的焊接;另外,七軸機器人(FD-B4S、FD-B4LS)將焊接電纜內藏於(yú)機器人本體(tǐ),因 此在示教作業時無需在意機器(qì)人與焊接夾具及工(gōng)件間的幹涉,動作非常順暢(chàng),焊接姿態自由度也得(dé)到了提高,能夠彌補傳統機器人因與工件或焊接(jiē)夾具的幹涉而造成 無法進入焊接的缺憾。
- Rethink Robotics的Baxter和Sawyer
Rethink Robotics是協作機器人的先驅,其(qí)中,最先開發的Baxter雙臂機器人,兩個手臂均擁有七個自由度,單臂最大(dà)工作範圍為1210毫米,Baxter可同時處理不同的兩項任務以(yǐ)增(zēng)加適用性,或者實時處(chù)理同一任務(wù)以實現輸出最大化。
去年推出的Sawyer則是單臂七軸機器人,其柔性關節采用了相同的串聯彈性驅動器,但其關節所采用的驅動器被重新設(shè)計(jì),使其更小巧。由於采用了七軸的設計,並(bìng)且工作範圍擴展至100毫米,因此能完成負載更大的工作(zuò)任務,載荷可達到4千克,比Baxter機器人2.2千克的有效載荷大了不少。
- 雅馬哈七軸機器人YA係列
2015年,雅馬哈推出了“YA-U5F”、“YA-U10F”、“YA-U20F”3款七軸機器人,這些機器人均通(tōng)過新型控(kòng)製器 “YA-C100”進行驅動控(kòng)製。
7軸機器(qì)人帶有相當於人類肘部的E軸,因此可自(zì)如完成彎曲(qǔ)、扭轉(zhuǎn)、伸展等動作。即使在6軸以(yǐ)下機器人難以實施作業的狹窄間(jiān)隙,也可順利完成作業及設(shè)置。另(lìng)外還可實現低半蹲姿勢以及繞到裝置背部的動作。采(cǎi)用中空構造的致動器,將(jiāng)裝置電纜和空氣軟管內(nèi)置於機械臂內,不會幹擾到周邊的設備(bèi),可實現緊湊型生產線。
此外,台灣財團法人精密機械研究發展中心也已研發出雙(shuāng)臂七軸機(jī)器人原型,期能助台灣業者打(dǎ)造3C電子製造的(de)生產利(lì)器,並縮小國內外技術差(chà)距。
國產七軸機器人來了
能否實現彎道超車?
中國七(qī)軸工業機器人的研發始於20世(shì)紀(jì)90年代初(chū),當時項目的領軍人物(wù)正(zhèng)是我(wǒ)國已故的著名機器人技術專家、中國工程(chéng)院院士張啟先,張啟先院士的主要貢獻(xiàn)之一便是完成了七自由(yóu)度冗餘機器人樣機的研(yán)製(zhì)。
上世(shì)紀80年代末(mò),由於研製難度及其之大,國際上研製出七自由度冗餘(yú)機器人樣機的國家寥寥無幾。而張啟先院士率(lǜ)領(lǐng)課題組經過幾年的艱苦(kǔ)拚搏,在1993年年底完成了首(shǒu)台七自由度冗餘(yú)機器人樣機的研製,並一(yī)次通過“863”課題驗收和部級鑒定。
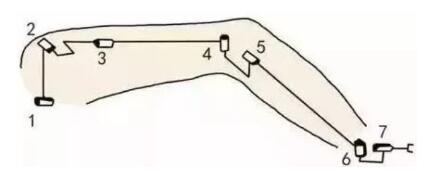
一種典型的冗餘手臂
盡(jìn)管我國(guó)在(zài)冗餘自由度機(jī)器人方麵取得一定成果,但主要停留在學術論文、科研報告和實驗樣機的階段,並沒(méi)有實(shí)現真正的產品化發展,這(zhè)無疑製約了我國機器(qì)人產品向高端產業化邁進的步伐。
作為國產工業機器人的(de)龍頭企(qǐ)業,新鬆率先在2015年工(gōng)博會上發布了首款國產七軸工業機器人,其自身重量為29千克,負(fù)載為5千克,重複(fù)定位精度可達到0.02毫米,工作半徑可達800毫米。它具備快速配置、牽引示教、視覺引導、碰撞檢測(cè)等功能,特別適用(yòng)於布局緊湊、精準度高的柔性化生產線,滿(mǎn)足精密(mì)裝配、產品包裝、打磨、檢測、機床上下料等工業操作需要(yào)。
目前,我國絕大多數工業機器人企業還尚未發布七軸工業機(jī)器人(rén)產品(pǐn),其中有一(yī)部分表示正在研發相關產品,會在(zài)年內有相關產品問(wèn)世,而另有(yǒu)一些企業則表示對七軸工業機器人產品有關注,但尚未計劃設計研發相關產品。
我國的機(jī)器人產業在七軸工業(yè)機器人的理論(lùn)研究有(yǒu)了很大進步,而商(shāng)業化產品方麵仍與國外有較大差距(jù)。究(jiū)其原因,主(zhǔ)要有以下兩個方麵:
一是自主創新能力弱。缺(quē)乏核心及關鍵(jiàn)技術的原(yuán)創(chuàng)性成果和創(chuàng)新理念,我國工業機器人總體技術與國外先(xiān)進水平相比,差距在十年以上(shàng)。
二是企業盈利能力較低,研發資金短缺。核心零部件技術的缺失導致企業生產成本高企,加之外資廠商紛紛降價,2015年70%以上企業(yè)的本體業(yè)務(wù)處(chù)於虧損狀態。
據專家(jiā)講,我國(guó)工業(yè)機器人總體技術與國外先進水平相比(bǐ),差距在十年以上。國產七軸工業機器人的出現,表明我們在工業機器人技術的(de)研發正在(zài)加(jiā)速,但是我們應該(gāi)有清醒的(de)認(rèn)識,差距(jù)真(zhēn)實存在(zài),想要彎道超車,我們需要盡快攻克核心技術難關,同(tóng)時也要重視人工智能(néng)、感知、識別、驅動和控製(zhì)等下一代技術的研發。
投稿箱:
如果您(nín)有機床行業、企業相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您(nín)有機床行業、企業相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息

業界視點
| 更多

行(háng)業數據
| 更多
- 2024年(nián)11月 金屬切削機床產(chǎn)量數據
- 2024年11月 分地區(qū)金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽(qì)車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情(qíng)況
- 2024年10月(yuè) 分(fèn)地(dì)區金(jīn)屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源(yuán)汽車銷量情(qíng)況
- 2024年8月 新能源(yuán)汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據(jù)
博文選萃
| 更多