



科普:工業機器人(rén)的結構和原理
2021-8-25 來源:- 作(zuò)者:-
工業機器人已經滲透到(dào)各行各業,幫(bāng)助(zhù)人們完成焊接、搬運(yùn)、噴塗、衝壓等各項任務,那(nà)麽你(nǐ)有思考過機(jī)器人是(shì)怎麽(me)做到這一些的嗎?它的內部結構又是怎樣的呢?今天(tiān)我們就通過一段動畫視頻,帶大(dà)家了解工業機器人的結(jié)構和(hé)原理。
機器人可以分為硬(yìng)件部分(fèn)和軟件部分(fèn),硬(yìng)件部分主要包(bāo)括本體和控製器,而軟件部(bù)分(fèn)主要指的是它的控製技術。
本體(tǐ)部分
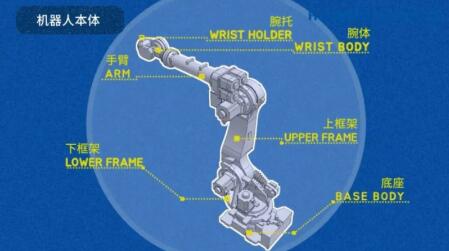
先來說(shuō)下機器人(rén)的本體部分。工業(yè)機(jī)器人是仿照人的手臂來進行(háng)設計的。我們以現代機(jī)器人HS220型號為例,從外觀來看,主要有底座、下框架、上框架、手臂、腕體(tǐ)、腕托等(děng)六個部分。
機器人的各個關節就和人類的肌肉一樣,靠(kào)伺服電機和減速器來(lái)控製移動。伺服電機是動力的來(lái)源,機器人的運行速度以及負載重量(liàng)如何,都和伺服電機有關。而減速器則是動力傳輸的中介,它擁有許多不(bú)同的尺寸。一般對於(yú)微(wēi)型機器人來說,要求的重複精(jīng)度都(dōu)很高,一般在0.001英寸或0.0254毫(háo)米以下。伺服電機與減速器相連,可以(yǐ)幫助提高精度,提高減速器的傳動比。
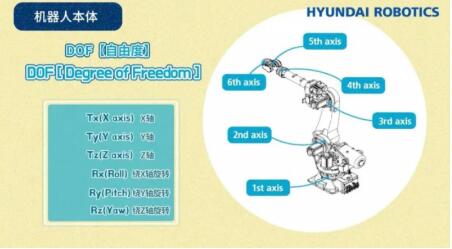
HS220擁有6個伺服電(diàn)機和減速器,它們安裝在每(měi)一個連接的接(jiē)頭上,使機器人可以向六個方向進行移動,也就是我們所說的六軸機器人。這六個方向分別是X軸-前後,Y軸(zhóu)-左右,Z軸-上下,RX-繞X軸(zhóu)旋(xuán)轉,RY-繞Y軸旋轉,RZ-繞(rào)Z軸旋(xuán)轉。正是這種(zhǒng)擁有多個維度移動(dòng)的能力,機器(qì)人才可以擺出(chū)不同的姿(zī)勢(shì),完(wán)成各項任務。
控製器
機器人的控製器相當於機器人的大腦,它參與的(de)是計算發送指令(lìng)和能量供應的整個過程,它根據指令以及傳感器(qì)信(xìn)息控製機器人完成一定的動作或作業(yè)任務,是決定機器人功能和性能的主要(yào)因素。

現代機器人最新款Hi6-S控製櫃(guì)
除了以上兩(liǎng)大(dà)部件外,機器人的(de)硬件部分還包括:
SMPS,開關電源提供能量;
CPU模塊,控製行動;
伺服驅(qū)動模塊,控製電流讓機器(qì)人關節移動(dòng);
持續模塊,相(xiàng)當於人(rén)類的交感(gǎn)神經,接管機器人的(de)安全、迅速控製機器人以及緊急情況停止等;
輸入輸出模塊,相當於檢測反應神經,是機器人與外部世界的接口。
控製技術
機器(qì)人的控製技術,指的是快速準確地操(cāo)作機器人應(yīng)用(yòng)的一個領域。機器人的一(yī)大優點就是它(tā)的程序可以很容易修改,這一點可以讓他們在(zài)不同的場景切換使用。為了能夠使人(rén)們操控機器人,就必須依靠示教器來進行(háng)。在示(shì)教器(qì)的顯(xiǎn)示界麵上,我們可以看到機器人的編程語言HR Basic以及機器人(rén)的各項狀態。我(wǒ)們(men)可以通過示教器(qì)來完(wán)成機器人的編程(chéng)。

控製技(jì)術的第(dì)二個部分是通過繪製表(biǎo)格,然後根據圖表來控製機器人的運動。我(wǒ)們可以使用計算出的力學數據(jù)來完成對機器人的規劃和動作(zuò)控製。
此(cǐ)外,機(jī)器視覺,以及(jí)最近熱門的人工智能沉浸式(shì)深度學習及分類等這些,都是屬於控製(zhì)技術的範疇。
現代機器人也有專門的研發團隊,來研究機器人的控(kòng)製技術。除此之外,我們也有機械係統研發團隊來負責機器人的本(běn)體,控製平台團隊負責控製器,以及(jí)應(yīng)用控製團(tuán)隊負責控製技術。正(zhèng)是多(duō)個部(bù)門的團結協(xié)作(zuò),才組成了如今的現代機器人。

現代機器人研究(jiū)所
投稿箱:
如(rú)果您有機床行業、企業相關新聞(wén)稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯部(bù), 郵箱(xiāng):skjcsc@vip.sina.com
如(rú)果您有機床行業、企業相關新聞(wén)稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯部(bù), 郵箱(xiāng):skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分(fèn)地區金屬切削機床產量數據
- 2024年(nián)11月(yuè) 軸承出口情況
- 2024年(nián)11月 基本型乘用車(轎車)產(chǎn)量數據
- 2024年11月 新能(néng)源汽車(chē)產量數據
- 2024年11月 新能源(yuán)汽車銷量情況
- 2024年10月 新能源汽車產量數據(jù)
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切(qiē)削機床(chuáng)產量數據
- 2024年(nián)10月 金(jīn)屬切削機(jī)床產量數據
- 2024年9月 新(xīn)能源汽車銷量情況
- 2024年8月(yuè) 新能源汽車產量數據
- 2028年8月 基本型乘用(yòng)車(轎車)產量數據
博文選萃
| 更多
- 機械加工過程圖示(shì)
- 判(pàn)斷一(yī)台(tái)加工中心精度的幾種辦法(fǎ)
- 中走絲線切割機床(chuáng)的發展趨勢
- 國產數控係統和數控機床何去何從?
- 中國的技術工人都去哪裏了?
- 機械老板做了十多年,為何還是小作坊?
- 機械行業(yè)最(zuì)新(xīn)自(zì)殺性營銷,害人害己!不倒閉才
- 製造業大逃亡
- 智能時代,少談點智造,多談點製造
- 現實麵前,國人沉默。製造業(yè)的騰飛,要從機床
- 一文(wén)搞懂數控車(chē)床加(jiā)工刀具(jù)補償功能
- 車床鑽孔攻螺紋加工方法及工(gōng)裝設計
- 傳(chuán)統鑽削(xuē)與螺旋銑孔加(jiā)工工藝的區別