



感(gǎn)應淬火機床與上下(xià)料機械手控製係統的設計(jì)
2020-6-17 來源: 湖北(běi)汽車工業學院電氣與信息工程學院 作者:雷鈞 羅敏 吳嶽敏 劉淩雲
摘要: 對汽車轉向節雙工位淬(cuì)火機床與上下料(liào)機械手控製係統進(jìn)行了設計,雙工(gōng)位淬火機床采用2 套西門子 808D 數控(kòng)係統(tǒng),使用新鬆 SR120 機械手配合其(qí)進行上下料,提高工作效率。淬(cuì)火機床(chuáng)與上下料機械手信(xìn)號交互通(tōng)過西門子 S7-1200PLC,用 PROFINET 總線(xiàn)把它們連(lián)接起來。經現場運行,整個係統工作正常,能夠滿足生產需要。
關(guān)鍵(jiàn)詞: 機械手; 數控係統; 信號交(jiāo)互
隨著汽車行業的發展,淬火機床在(zài)汽車零部件加工中應用(yòng)越來越廣泛。汽車轉向節承受多變的衝擊負載,要求具有高的強度和硬度,因此多采用高頻淬火工藝。機(jī)械手用於單機或自動線上(shàng)傳送工件,可以減輕操(cāo)作工的勞動強度,同時還可以大大(dà)提升生產效率。從文獻[1-3]可以看出,上下(xià)料機械手在機(jī)床上應用廣泛,文獻[1]敘述了西門子數控係統通過 IO 與上下料機械手控製係(xì)統交互信號,文獻[2-3]敘述了使用PLC 直接(jiē)控製(zhì)上下料機械手。
本文以汽車轉向節淬火機床自動上下料為例(lì),使(shǐ)用新鬆 SR120 機(jī)械手,設計(jì)淬火機床與上下料機械手(shǒu)控製(zhì)係統。
1 、工作原理與控製流程
如圖 1 所示(shì),轉向節淬火機床由左右兩個工位組成,實現雙工位交替淬火,提升工作效率(lǜ)。淬火部位是轉向節端麵和部分軸頸(jǐng)。每個工位安裝有伺服電動機(jī)、主軸旋轉電動機( 三相異步電動機)
、拖板、絲杠、上(shàng)頂(dǐng)尖(jiān)、下頂尖等。
上下頂尖頂緊轉向節,主軸旋轉電動機通(tōng)過皮帶,帶動下頂尖旋轉從而帶動轉向節旋轉(zhuǎn),以均(jun1)勻淬火。頂尖與拖板固定在一起,伺服電動機通過帶動絲杠來實現拖板上下移動。在人工進行上下料時,需要踩住腳踏板(bǎn)讓上頂尖縮回(huí),然後將轉向節上下錐口對齊到上(shàng)下頂尖,由於轉向節較重,把轉向(xiàng)節和上(shàng)下頂尖對齊需要較多的時間,影響了生(shēng)產(chǎn)節(jiē)拍和(hé)效率。
因此在機床外設有一(yī)台新(xīn)鬆SR120 關(guān)節式機械手帶 2 個手爪,實現轉向節(jiē)的自動上(shàng)下料。機械手包括主機(jī)與附件、氣動爪具(jù)。機械手有效範圍不小於 3. 0 m,A 爪用於上料,B 爪用於下料
。機械手的動作(zuò)順序是: 首(shǒu)先光電開關檢測抓料(liào)架上的抓料(liào)位是(shì)否有轉向節。如果(guǒ)有料,機械手移動到抓料位,A 爪夾起轉向節; 沒有料則機械手會在原點等待(dài)。
機(jī)械手夾(jiá)起轉向節後,返回原點。然後(hòu)檢測淬(cuì)火機床兩個工位的安全門是否打開,因為機床加工程(chéng)序中已(yǐ)經設定加工開始(shǐ)前,門需要關閉,加工完成後,門自動打開,以此來判(pàn)斷淬(cuì)火是否完成。等有(yǒu)開門信號時,機械手去相應工位換 B 爪把淬火完的轉向節(jiē)取下來。機(jī)械手退出機床,換 A 爪,把未淬火的轉向節放到淬火工位上,機床上下(xià)頂尖固定轉(zhuǎn)向節。
然後機械手再退出機床到設定點,發上料(liào)完成(chéng)信號,淬火機床(chuáng)數控係統開始啟動轉向節(jiē)淬火(huǒ)程序。機械手繼續移動到放料位,把(bǎ)淬火後的轉向節放下,然後返回到原(yuán)點,等待執行下一個循環。
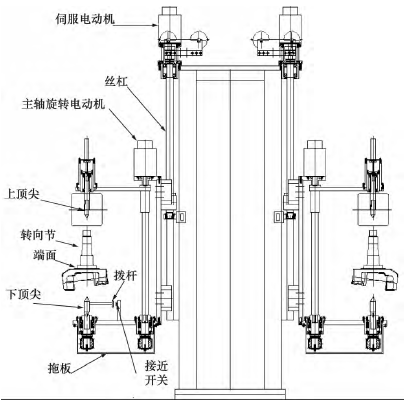
圖1 雙工位轉向節淬火機床(chuáng)
淬火機床收到機械手的上料(liào)完成信號後,開(kāi)始轉向節淬火,如圖 2 所示(shì),先關閉安全門,保證加工安全。隨後(hòu)主軸(zhóu)電動機通過皮(pí)帶(dài)帶動下頂尖旋轉。下頂尖側麵安裝有撥杆,下頂尖旋轉後撥杆會碰到轉向節的耳朵,帶動轉向節(jiē)旋轉。如果頂尖沒有頂緊轉(zhuǎn)向節,會在機床上料位把轉向節甩下來,避免在淬火的時候甩下來,損壞感應圈。為(wéi)了避免端麵定位時感應圈劃傷轉(zhuǎn)向節端麵,過幾秒後旋轉停止。
本淬火係統隻有一個電源提供(gòng)功率,因此同一時刻隻(zhī)有一個工(gōng)位在進行淬火處理,隻能一個接觸器閉合,接觸器隻(zhī)有等待另外一個接觸器斷開才能閉合(hé)工(gōng)作。端麵定(dìng)位(wèi)啟動後,伺服電動機帶動拖板向上整體移(yí)動,當感應圈旁邊的觸頭與轉(zhuǎn)向節端(duān)麵接觸,伺服電動機就停(tíng)止運(yùn)行並向下後退設定(dìng)行程便於感應加熱。
端麵定位結束後(hòu)轉(zhuǎn)向節再次旋轉,接觸器吸合啟動加熱。當淬火達到工藝要求時停(tíng)止加熱,接觸器(qì)斷開,對淬火工件進行(háng)冷卻,冷(lěng)卻時間(jiān)到後拖板向下移動(dòng)到(dào)下料位,再啟動旋轉定位,方便機械手下料。最後自動打開安全(quán)門。
2 、控製係統設(shè)計
轉向節雙工位淬(cuì)火機床由 2 套西門子 808D 數控係統分別控(kòng)製左右工位,機械手控製係統控製 6 關節機械手的位置,機械手上的氣閥控(kòng)製氣爪夾緊鬆開,氣(qì)閥由西門子 S7-1200PLC 控(kòng)製。機械(xiè)手氣爪張合(hé)信號由磁性(xìng)開(kāi)關檢測,並且輸出開關信(xìn)號給 S7 - 1200。808D 數控係統用的是西門子 S7 - 200 的 PLC,不方便(biàn)與機械手控製係統直接進行信號(hào)交互,因(yīn)此用 S7 -1200 處理數控係統與機(jī)械手控製係(xì)統的交互信號。
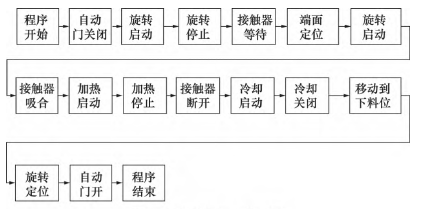
圖2 機床淬火加工流程圖
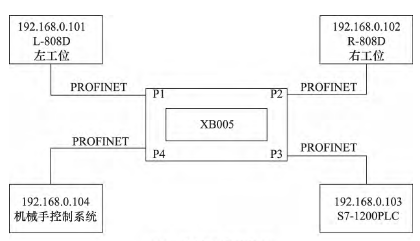
圖3 控製係統(tǒng)結(jié)構圖
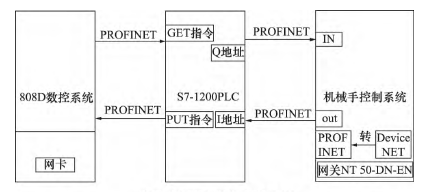
圖4 控製係統信號交互圖
如圖 3 所示,控製係統之間(jiān)用 PROFINET 總線(xiàn)連接,西門子 XB005 為非網管型交換機。S7-1200 可設置(zhì) IP。數控係(xì)統自帶網卡,可設置 IP。機械手控(kòng)製係統用網關NT 50-DN-EN 把 Device Net 轉為PROFINET,可設定(dìng) IP 。
3 、控製係統間信號交互設計
控(kòng)製係統信(xìn)號交互(hù)如圖 4 所示,S7-1200 用 GET指令從(cóng)左右工位數控係統獲(huò)取信號,用 PUT 指令將信號放入相應的數控係(xì)統。機械手控製係統與 S7-1200之間的信號交互直接用 S7-1200
的 Q 地址對應機械手控製係統的 IN 地址,S7-1200 的 I 地址對應機械手控製係統的 OUT 地址。機械手控製係統給(gěi)出的地址可以(yǐ)設定其作用。
表1 是機械手控製係統與 S7-1200PLC 部分交互信號。
表(biǎo) 1 機械手控製係統與 S7-1200 PLC 部分信號交互表
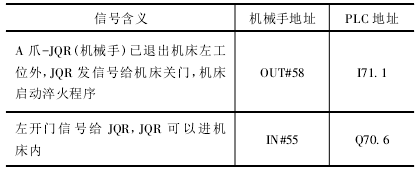
( 1) 信號從機床數控係統到機械(xiè)手控製(zhì)係統以檢測左工位開門為(wéi)例論述信號流向(xiàng)。如圖 5 所示,開門信號 I5. 3 輸入到 808D 數控係統(tǒng)並(bìng)控製數(shù)控係統的(de) M50. 3。
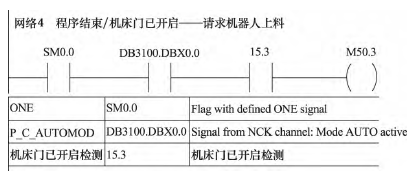
圖5 數控係統開門信號輸出
如圖 6 所示,S7-1200 調(diào)用 GET 指令將數控係統M50. 3 的數據讀取到 S7-1200 的 M50. 3。
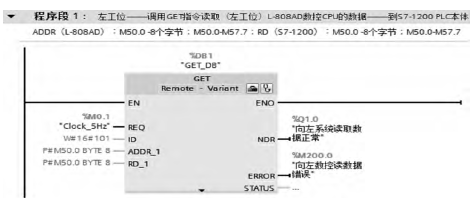
圖6 S7-1200讀取數控係統信號
如圖 7 所(suǒ)示,S7-1200 的 M50. 3 控製 Q70. 6。如表 1 所示,S7-1200 的 Q70. 6 和機(jī)械手控(kòng)製係(xì)統的輸入信號 IN#55 是對應的,這樣就把數控係統的機床門檢測信(xìn)號 I5. 3 傳送到機械手控製係統(tǒng) IN#55。
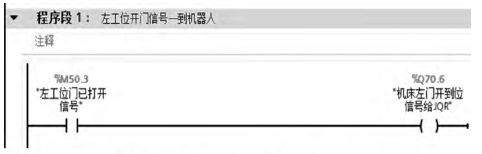
圖(tú)7 S7-1200輸出信號到機(jī)械手控製係(xì)統(tǒng)
( 2) 信號從機械手控製係統傳(chuán)遞到機床數控(kòng)係統以機械(xiè)手退出(chū)機床,啟動淬火機床淬火為(wéi)例論述信號流向。
如表 1 所(suǒ)示,機械手控製係統的 OUT#58對應著(zhe) S7 - 1200 的 I71. 1,如(rú)圖 8 所(suǒ)示,S7 - 1200 的I71. 1 控製輸出 S7-1200 的 M60. 0。
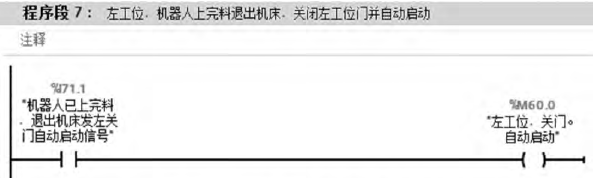
圖8 機械手控製係統輸入信號到S7-1200
如圖 9 所示(shì),S7 -1200 調用 PUT 指令將 PLC 的M60. 0 的數(shù)據寫入左工位(wèi)數控係統的(de) M60. 0 中。數控係統 M60. 0 控製關門並且啟動轉向節淬火(huǒ)程序。
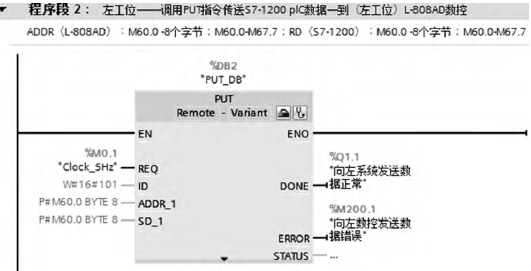
圖9 S7-1200寫入數控係統信號
4 、數控(kòng)係統準停和端麵定位功能設計
如圖 10 所示,由於轉向節特殊的結(jié)構,機械手進行上下料時需要轉向節的雙(shuāng)耳分(fèn)別在下頂尖和撥杆兩側,這樣才不(bú)會磕碰下頂尖和撥杆。在上料時由機械手抓取位置和轉向節放置位置保證上料位置,在下料時轉向節的位置和上料時一(yī)致。
如圖 10 所示,在拖板上固定一個感性接近開關,當撥杆轉過接近開關時,接近(jìn)開關信號輸入到數控係(xì)統輸入口,輸(shū)出給數控係統的 DB2900. DBX0. 1。
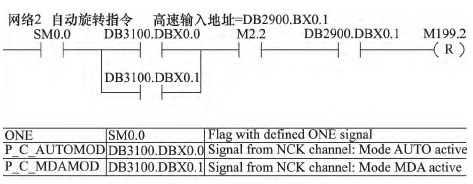
圖10 定向停(tíng)程序圖
如圖 10 所示,當加工程序執行旋轉定向停後,M2. 2 接 通,當 下 頂 尖(jiān) 轉 到 感(gǎn) 應 開 關 位 置 時,DB2900. DBX0. 1 信號有效,旋(xuán)轉啟動(dòng)信號 M199. 2 複位(wèi),旋轉準確停止。
用機械手進行上料時,為了避免遇到轉向節放在下頂尖,上頂尖對不齊的情況。轉向節先對齊上頂(dǐng)尖,保證其可以頂入上錐口,然後機械手下移把(bǎ)轉向節(jiē)放入下頂尖,上頂尖在氣(qì)缸推動下始終頂緊轉向節(jiē)。淬火機床對轉(zhuǎn)向節淬火時要保證感應線(xiàn)圈和轉向節端麵的相對(duì)位置合(hé)適,因此設計了端麵定位功能。采用端麵(miàn)定位(wèi),每次定位都是相對於轉向節端麵,可以提高定(dìng)位精度,對淬火效果也有利。如圖 11 所示,當(dāng)數控加工程序運行到 M13 時,端麵定位啟動。
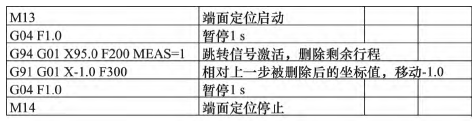
圖11 端麵定(dìng)位數(shù)控程序
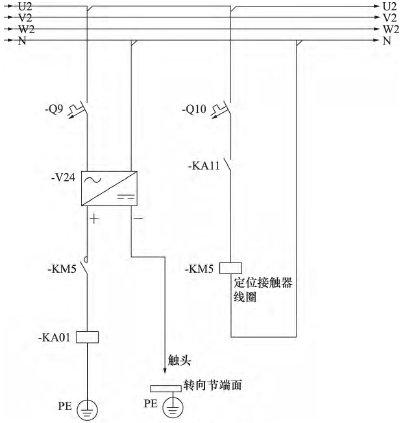
圖12 端麵定位(wèi)電氣圖
端麵定位啟動後,數控係統輸出接通繼電器 KA11的(de)線圈,如圖 12 所示,KA11 常開觸點接通,定(dìng)位接觸器線圈 KM5 得電,常開(kāi)觸點 KM5 閉合。當伺服電動機帶動(dòng)拖板向上移動時,轉向節端(duān)麵會與開關電源負端(duān)觸點接觸,回路接通,繼電器 KA01 線圈得電。繼電器 KA01 常開觸點閉合,此觸點(diǎn)連接(jiē)數(shù)控係統的 I5. 7。
如圖 13 所示,I5. 7 接通後,輸出給數控係統的DB3200. DBX6. 2,從而數控加工程序的跳轉信號激活,如圖(tú) 11 所示,伺服電動機停止運行,從而拖板停止運行。
然後拖板向下後退設定行程便於感應加熱。
定位完成後(hòu),KA11 斷開。
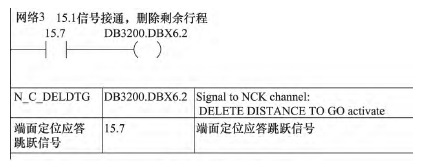
圖13 端麵定位(wèi)程
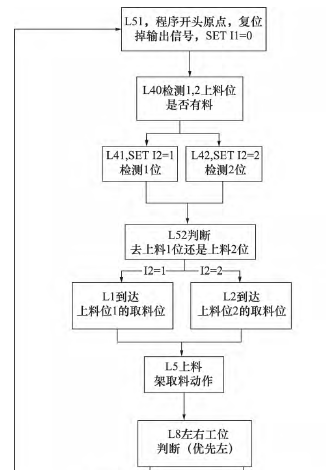
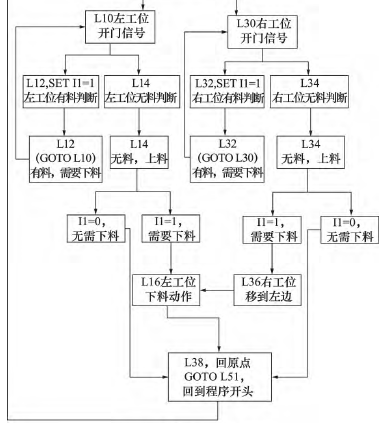
圖14 機(jī)械手動作流程圖
5 、機械手控製程序設計
機械手控(kòng)製係統給出了示(shì)教編程(chéng)所需的指令以(yǐ)及輸入輸出地址。通過示教編程控製機械手的動作流程,實現機械手自動上下料(liào)。上料位設置 2 個,下料位設置一個。機械手動作流(liú)程如(rú)圖 14
所示,Lx 是機械手的程序標簽。
6 結語
本文通過分析淬火機床與上下料(liào)機械手的控製(zhì)流程,設計開發了淬火機床與上下料機械手控製係統。通過 S7-1200 溝通(tōng)數控係統與機械手控製係統的交互信(xìn)號,實現兩者的相互配合,機械手自動上下料以及機床自動淬火運行。通過調試及(jí)運行滿足了生產和工藝方麵的要求。
投稿箱:
如果您有機床行業、企業相關新聞稿件(jiàn)發(fā)表,或進行資訊(xùn)合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件(jiàn)發(fā)表,或進行資訊(xùn)合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
馬")
業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬(shǔ)切削機床產量數據
- 2024年11月 分地區金屬切削機床(chuáng)產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基(jī)本(běn)型乘(chéng)用車(轎車)產量數(shù)據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情(qíng)況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月 軸承出口情況(kuàng)
- 2024年10月 分地區金屬切削機床產(chǎn)量數(shù)據
- 2024年10月 金(jīn)屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源(yuán)汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選萃
| 更多