



機器人微型電機選擇重點要(yào)素
2020-1-17 來源:-- 作者:-
在機器(qì)人行業中(zhōng)微(wēi)型電機應用非常多,如(rú)機器人手指關節是通過舵機連接微型(xíng)電機來進行各種動作。機器人常用的幾種微型電機有有刷直流電機(jī)、無刷直流電(diàn)機、永磁同步電機及(jí)步進電機,在常見的機器人產品中,有刷直流電機應用也是比較多的(de),下麵我們來(lái)了解下機器人(rén)微型電機的選擇要素。
一、微型電機的選擇要求
現在市場上有非常多型號的微型直流電機,生產廠家更(gèng)是多不勝數,所以在微型(xíng)電機的選擇過程中性能參數是重點考慮因素,微型(xíng)電(diàn)機具有多條運行特性(xìng)曲線,從機器人產品的角度來看,我們主(zhǔ)要(yào)考慮工作電壓、轉速、轉矩、電(diàn)流、物理參數及其他部件參數
1.工作電壓:微型電機(jī)會存在(zài)多個電壓參數(shù),最常用的為額定電壓,有的微型電機可以在超過額定電壓運行一段時間,但是(shì)不可以長時間運(yùn)行,不(bú)然(rán)還是會發熱燒毀;
2.轉速:微型電機(jī)每分鍾的旋轉速度;
3.轉矩:微型電機旋轉時候的扭力;
4.電流:微型電機有額定電流、空載電流和堵轉電流參數;
5.物理參數:微型電機的尺(chǐ)寸、軸尺寸等
6.其他參數:微型電機的減速箱參數等

行星減(jiǎn)速電機
微(wēi)型直流電機的供電方式是直流電,所以是可以用(yòng)電池供電的,這也是直流電機在機器人(rén)產(chǎn)品及各種電機(jī)產品上應用(yòng)廣泛的原因,微型電機一(yī)般為高速低轉矩運轉,但是機器人產品要求扭矩大,所以需要(yào)在微型電(diàn)機輸出軸之間增加減速器,也叫做齒輪(lún)組或減速機(jī),通過減速器可以增加扭(niǔ)力降低轉速,即轉速越低,扭矩就越大,目前(qián)的機器人微型電(diàn)機(jī)在生產時廠家都會帶減速機,不需要自己再去裝(zhuāng)配,隻要把轉速和扭矩參數給到微型電機生產廠家即可。
微型(xíng)減速電機輸出轉矩高、使用(yòng)簡單、選擇(zé)範(fàn)圍大,但是精度較低,所以在機器(qì)人應用中,需要引入轉速閉環控製,而不可使用開環控製(zhì)。
二、機器人產品微型減速電機(jī)選擇考慮(lǜ)因(yīn)素
1.通用性:微(wēi)型電機的通用性越強,價格就會越便宜;
2.工作電壓:工作電壓範圍在6-20v;
3.輸出轉矩:如0.1-0.5Nm之間的輸出轉矩,可用在20-30kg的(de)機器人產品;
4.轉速:如(rú)機器人產品是通過輪子運動的,需要的轉速較高,並需要可調速。
還有微型減速電(diàn)機(jī)需要可以正反(fǎn)轉,雖然現在(zài)的微型電機都是可(kě)以正反轉的,但是有一些電機隻能單方向(xiàng)旋轉,所以我們要(yào)注(zhù)意(yì)這點參數。
另外,機(jī)器人的運行環境因素也對選擇微型(xíng)電機的選擇也是一個重要(yào)考慮範圍,如室外?室內?光滑地麵?粗超地麵?是否需要爬(pá)坡?等等,像(xiàng)掃地機器人是通過微型電機驅動輪胎(tāi)來進行運動的,所(suǒ)以它的運動(dòng)速度就取決於微型電機的(de)轉速與輪胎的直徑了。而微型電機的旋轉速(sù)度取決於輸入的(de)電壓和負載轉幾乎(hū),在相同的供電電壓(yā)下,靠在轉速一家是高於負載轉速的,所以微型電機出(chū)力越大,它的轉速就會越低,電流也就越大,當輸出力增大到一定程度的時候,微型電機就會定製旋轉了,這個也就會我們參數(shù)中的堵(dǔ)轉,當微型電機電流最大(dà)時,如果電機長時間堵轉將會引起電機溫度上升,嚴重時會造成電機損壞。
下麵為機器人輪胎速度與微型(xíng)電機旋轉速度關係
V=0.02*pi*w*R/60;
其中:V為機器人運行速度(m/s);
w為經過減速器後電機旋轉速度(rpm);R為電機(jī)半徑(jìng)(cm);
假(jiǎ)設我們要求機器人運行平均速度為(wéi)Vavg,那麽要求減速電機轉速為(wéi):
w=60*Vavg/(0.02*pi*R)
三、微型電機轉矩要求
如果是機器人運行地麵有摩擦(cā)及爬(pá)坡,那麽轉矩的要求就不一樣,假設機器人運行地麵摩擦因數為C,機器人質量為m(kg),此時(shí)機器人在地麵勻速運(yùn)行要求轉矩為(wéi):
T=0.01Ff*R=0.01C*mg*R;
其中Ff為摩擦力(lì)(N),R為輪胎半徑(cm);
在勻速運動之外,可能我們還會規定機器人的最大爬坡(pō)角度theta以(yǐ)及(jí)要求的(de)最(zuì)大加速(sù)度(dù)a等,此時,可以將兩者等效(xiào)為摩擦,此(cǐ)時:
C=C0+sin(theta)+a/g;
其中,C0為固有的地麵摩(mó)擦係(xì)數,theta為(wéi)最大爬坡(pō)解讀,a為最大加速度,g為重力加速度;
T=0.01CmgR;
上(shàng)述1式和2式即為機器(qì)人電機轉速和(hé)轉矩(jǔ)選擇方(fāng)法。
四、微型電機的運行條件
當(dāng)微型電機(jī)在開始供電時,微(wēi)型電機的軸(zhóu)還沒開始(shǐ)旋轉,這個時候電機是處於堵(dǔ)轉狀態的,微型電機電(diàn)流最大為iS,所產生(shēng)的轉矩也最大,所以微型電機開始旋轉,隨著電機的轉速上升,因微型電(diàn)機反電(diàn)勢增大,微型電機電流下降、轉矩下降(jiàng)電機轉矩(jǔ)與(yǔ)負載(zǎi)轉矩相等時,電(diàn)機達到平衡狀態,即為平衡狀態電機轉(zhuǎn)速。
在(zài)機器(qì)人中,負載轉矩主(zhǔ)要包括摩擦、爬坡(pō)、加速等因素,在多(duō)人還(hái)是比較關心微型電機在不同負載條件下所能達到的最(zuì)高轉速。比如在空(kōng)載條件下微型電機能達到的最大轉速,空載轉速為w0;在負載條件(jiàn)下,微型電機(jī)堵轉時所能產生的轉速(sù)為最大(dà)轉矩,堵(dǔ)轉轉矩為Ts,在其他條件(jiàn)下,微型電機運行在兩者之間的線性連線(xiàn)上,如果負載(zǎi)為T,那麽此時,微型電機的最高轉速為w=w0×(1-T÷Ts)
假如微(wēi)型電機最高轉速為w,那麽微型電(diàn)機所能產生的最大轉矩為T=Ts×(1=w÷w0)
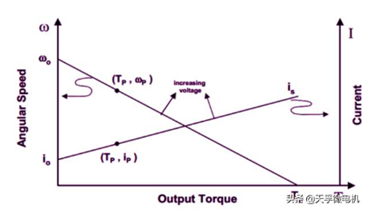
微型電機性能曲線圖
上圖為(wéi)微型電機的最大轉速與最大轉矩、轉矩與(yǔ)電流之間的線性關(guān)係
微型電機空載最高轉速為w0,空載電流為i0,隨(suí)著(zhe)負載轉矩的增大,微型電機的轉速便線性下(xià)降,電流增大,直到負載轉矩達到最大(dà)轉(zhuǎn)矩,微型電機堵轉,在微型電機轉矩為T時,電(diàn)機的電流(liú)為i=i0+(is-i0)×T÷Ts
其中i0為空載電流(liú),is為堵轉電流,Ts為堵轉轉矩
所以在選擇機器人微(wēi)型電機時我們需(xū)要(yào)考慮微型電機的運行電壓、空載轉速、一定轉矩下(xià)的轉速、一定轉矩下的電流這電流表因素
1. 微型(xíng)電(diàn)機的運(yùn)行電壓:前現我們講過大部分機器人(rén)產品微型電機的運行電壓在(zài)6~24V,對於小型機器人來說一般使用的是鎳氫電池,電(diàn)壓在3.6~48不等,對於12V的微型電機(jī)一(yī)般使用7.2V或者9.6V供電;
2. 微型電機的轉速:一般選擇在額定(dìng)電壓和額定轉矩下所能滿足條件的微型(xíng)電機轉速,假如是輪(lún)胎(tāi)尺寸為(wéi)5-20cm的機器人來說,微型電機(jī)的轉速40-300rpm就足夠了;
3.微型電機的轉矩:對於微(wēi)型電機的轉矩我們一般(bān)計算的基礎上留有50%的裕量;另外,如果電機數量多於一個(gè),一般(bān)可以對電機轉矩要(yào)求(qiú)除以相應的數量。
4.微型電機的電流(liú):微型電機的電流決定著機器人的運行時間(jiān),一(yī)般(bān)是(shì)根據微型電機的電流數據就可以大概評估其應用範(fàn)圍,如0.01A的微型電機,就適(shì)合於大多數機(jī)器人人產品;
還有一個(gè)尺寸問題,設計機器人產品時要確保微型電機能夠安裝
投(tóu)稿箱:
如果您有機床行業、企業相關(guān)新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關(guān)新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
查")
行業數(shù)據
| 更多
- 2024年11月 金屬切削機床產量數據(jù)
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口(kǒu)情況
- 2024年11月(yuè) 基本型乘用車(轎車)產量數據
- 2024年11月 新(xīn)能源汽(qì)車(chē)產量數據
- 2024年(nián)11月 新能源汽車銷量情(qíng)況
- 2024年10月 新能源汽車產(chǎn)量數據
- 2024年10月 軸承(chéng)出口情況(kuàng)
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源(yuán)汽車銷量情況
- 2024年8月 新能源汽車(chē)產量數據
- 2028年8月 基(jī)本型乘(chéng)用車(轎車)產量數據