



20種工業機器(qì)人應用案例炫(xuàn)酷合集,精彩不容(róng)錯(cuò)過!工業機器人全知道……
2019-7-15 來源:- 作(zuò)者:-
近年來德國率先提出"工業4.0"概念,美國推行"先進製造夥伴關係"計劃,日本實施"智慧製造係統",而中國也提出了"中國製造2025規劃",這些都指向(xiàng)同一個目標,那就是希望通過先進的IT與自動(dòng)化技術來促進製造(zào)業的(de)革新,以實現"智能化",提(tí)升效(xiào)率,降低成本。而要實現這個目標工業機器人是不可或缺(quē)的一環。
1、工業機器人的發展背景
從1920年,"Robot"這(zhè)個詞(cí)被捷克劇作(zuò)家創造出來,到現在機器人已經發展(zhǎn)了近百年,從最初的單純用(yòng)於搬運(yùn)的工業機器人,到(dào)第二代具有視覺(jiào)傳感器以及信息處理技術的工業機器人,再到(dào)目(mù)前(qián)正在(zài)研究的"智(zhì)能機器人",工(gōng)業(yè)機器人的發展及應用日新月異。


2、工業機器人(rén)的應用場(chǎng)景
在(zài)短短50多年的時間中(zhōng),機器人技術得到了迅速的發展,在眾多製造業領域中,工業機器(qì)人應用最廣泛的領域是汽車及汽車零部件製造業,並且(qiě)正在不斷地向其他領域(yù)拓展,如機械加工行業、電子電氣行(háng)業、橡膠(jiāo)及塑料工業、食品工業、木材(cái)與家具製造業等領域中。
在工業生產中,焊接機器人、磨拋加工機(jī)器人、焊接(jiē)機器人、激光加工機器人、噴(pēn)塗機器人、搬運機器人、真空機器人等工業機器人都已被(bèi)大量采用(yòng)。
(1)磨拋加工機器人
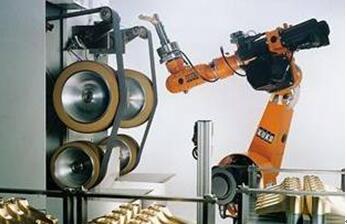
磨拋加工(gōng)機器人主要應用於航空、航海、核電葉片磨拋,采(cǎi)用機器人持砂帶在葉片(piàn)表麵磨拋,采(cǎi)用柔性接觸、視覺定位的方式減小磨拋缺陷。
與人工(gōng)磨拋相比,具有加工時間短,型麵精度高,表麵粗糙度小,加工一致性好的特點。能適應大負(fù)載,惡劣的工作環境。精度要求高。
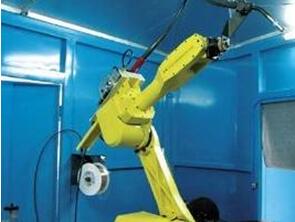
(2)焊(hàn)接機器人

弧焊機器人(rén)主要應用於各類汽車零部件的焊接生產,主(zhǔ)要有熔化極焊接作業和非熔化極焊接作業兩種類型。
在該領域(yù),國際大型工業機器人生產企業主要以向成套裝備供應商提供單元產品為主。應用特點(diǎn):要求快速平(píng)穩移動,定位精度(dù)要求較高。
(3)激光加工機器人

激光加工機(jī)器人是將機器(qì)人技術(shù)應用於(yú)激光加工中,通過高精度工業機器人實現更加柔性(xìng)的激(jī)光加工作(zuò)業。
通過對加工工件的自動檢測,產生(shēng)加工件的模型,繼而生成加工曲線,也(yě)可以利用CAD數據直接加工。可用於(yú)工(gōng)件的激光表麵處理(lǐ)、打孔、焊接和模具修複等。精度要求較高。
(4)真空機器人
真(zhēn)空機器人是一種(zhǒng)在真空(kōng)環境下工作的機器人,主要應用(yòng)於半導體(tǐ)工業中,實現晶圓在真空腔室內的(de)傳輸。
真(zhēn)空機械手難進口、受限製、用量大、通(tōng)用性強,其(qí)成為製(zhì)約了半導體裝備整機的研發進度和整(zhěng)機產品(pǐn)競爭力的關鍵部件。精度要求較高。
(5)噴塗機器人

噴漆機器人一般采用液(yè)壓驅動,具有(yǒu)動作速度快、防爆性能好等特點,可(kě)通過(guò)手把手示教或點位示數來實現示教。
噴漆機器人廣泛用於汽車、儀表、電器、搪瓷等工(gōng)藝生產部門。噴塗機器人所處工作環境惡劣(liè),其精度要求(qiú)較低。
(6)搬運機器人

搬運機器人由計算機控製,具有移動、自動導航、多傳感器(qì)控製、網絡交互等功(gōng)能,它可廣泛應(yīng)用於(yú)各行業的柔性搬運、傳輸等功能,也(yě)用於自動化(huà)立體倉庫、柔性加(jiā)工(gōng)係統、柔性裝配係(xì)統;
同時可(kě)在車站、機場、郵局的(de)物品分撿中作為運輸(shū)工(gōng)具。其負載大,無(wú)嚴格精度要求。
3、工業機(jī)器人分類

工業機器人按不同的方法可分下述類型:具體看下圖!
4、工業機器(qì)人性能(néng)評判(pàn)指標

表示機器人特性的基本參數和性能指標主要有工作空間、自由度、有效負載、運動精度、運(yùn)動特(tè)性、動態特(tè)性等。
工業機器人性能(néng)評判指標
(1)工作空(kōng)間(Work space)
工作空間是指機(jī)器人臂杆的(de)特定部位在一定條件下(xià)所能到達空間的(de)位置集合。工作空間的(de)性狀(zhuàng)和大小(xiǎo)反映了(le)機器人工作能力的大小。
(2)運動自由度
運動自由度是指機器人(rén)操作機在空間運動(dòng)所需的變量數,用以表示機器人(rén)動作(zuò)靈活程度的參數,一般是以(yǐ)沿軸線移動和繞軸線轉動的獨立運動的數目來表示。
自由物(wù)體在空間自六個自由(yóu)度(三個轉動自由度和三個移動自由(yóu)度)。工業機器人往往是個開式連杆係,每個關(guān)節運動副(fù)隻有一個自由度,因此通常機器人的自由度數目就等於其關節數。機(jī)器人的自由度數(shù)目越多,功(gōng)能就越強。
(3)有效負(fù)載(Payload)
有效負(fù)載是指機器人操作機在工作(zuò)時(shí)臂端可能搬運的物體重量(liàng)或所能承受的力或(huò)力矩,用以表示操作機的負荷(hé)能力。
機器人在(zài)不同位姿時,允許的最大可搬運質量是(shì)不(bú)同的,因此機器人的額定可搬運質量是(shì)指其臂杆在工作空間中任意位(wèi)姿時腕關節端部都能搬運的最大質量。
(4)運動精度(Accuracy)
機器人機械係統的精度主要涉及位姿精度、重複位姿精(jīng)度、軌跡精度、重複軌跡精度等。
位姿(zī)精度是指指令位(wèi)姿和從同一方向接近該指令(lìng)位姿時的(de)實到位姿中心之間的偏差。重複位姿精度是指對同指令位姿(zī)從同一方向重(chóng)複響(xiǎng)應n次後實(shí)到位姿的不一(yī)致(zhì)程度。
軌跡精(jīng)度是指機器人機械接(jiē)口從同一方向n次(cì)跟隨指令軌跡的接近程度。軌(guǐ)跡重複精度是指(zhǐ)對一給定軌跡在同方向跟隨(suí)n次後實到軌跡之間的不(bú)一致程度。
(5)運動特性(Sped)
速度和加速(sù)度是表(biǎo)明機器人運動特性的主要指標。在機器人說明書中,通常提供了主要運動(dòng)自由度的最大穩定速度,但在實際應用中單純考慮最(zuì)大穩定速(sù)度是不夠的(de),還應注意其最大允許加速度。
(6)動態特性
動態特性結構動態參數(shù)主要包括質量、慣(guàn)性矩、剛度、阻尼係數、固有頻率和振動模態。
5、工業機(jī)器人全方(fāng)位解讀
(1)我國的工業(yè)機器(qì)人現狀(zhuàng)
工業機器人之所以能在中國市場異軍突起(qǐ):
首先是因為在成本上(shàng),機器人通(tōng)常僅為人(rén)工成本(běn)的四分之一;
其次(cì),機(jī)器(qì)人在質量、效率(lǜ)、管理等方(fāng)麵還能帶來很(hěn)多新的附加值。
所以,在機器人技術快速提升、價(jià)格大幅下降、人工短缺(quē)、人力成本上升等因素的綜合作用下,中國的工業機器人產業正處於一個井(jǐng)噴(pēn)時代。
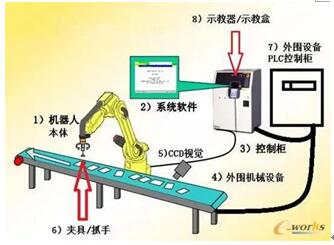
(2)工業機器人的關鍵技術
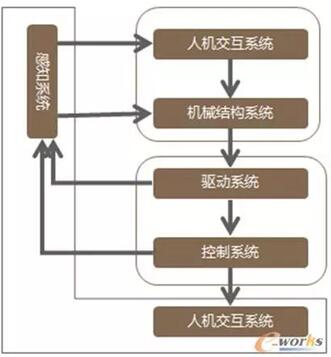
工業機器人由3大部分6個子係統組成。3大(dà)部分是機械部分、傳感部分和控製部分。6個子係統可分(fèn)為機械結構係(xì)統、驅動係統、感知係統、機器人-環境交互係統、人機交互係統和控製係統。
機(jī)器人關鍵基礎部件主要分成以下三部(bù)分(fèn):高精度減速機,高性能交直流伺服電機(jī)和驅動器,高性能控製器等。機(jī)器人(rén)性能指標主要有工作空間、自由度、有效負載、運動精度、運動特性、動(dòng)態特性等。
(3)工業機器人麵臨的技術挑戰
雖然機(jī)器人技術在近(jìn)幾年取得了非常大的進步,但我們要清醒地(dì)看到中(zhōng)國工業機器人產業發展麵(miàn)臨(lín)的(de)巨大挑(tiāo)戰。
工(gōng)業機器人設備
由(yóu)於關鍵零部件受(shòu)國外(wài)技術壟斷,國(guó)產(chǎn)機(jī)器人並(bìng)不具備顯著成本優勢。同時(shí),大(dà)量機器人的(de)生產廠商存在低端(duān)鎖定的風險。另外(wài),機器(qì)人(rén)研發、製造與應用之間缺乏有效銜接。(來源於工(gōng)業4.0)由中國機械(xiè)工業集團有(yǒu)限公司主辦,廣州市工業和信息化委員會組織,國機(jī)智能科技有限公司、中國機械國(guó)際(jì)合作股份有限(xiàn)公司、中國電器科學研究院有限公司聯合承辦(bàn)的“2019中國(廣州)國際機器人(rén)、智(zhì)能裝備及製造技術展覽會(RoboIMEX2019)”、“2019中國(廣州)國際數控機床(chuáng)展覽會(huì)”,11月30日在廣州(zhōu)•中(zhōng)國進出口商品交易會展館盛大開幕。展品範圍涵蓋工業機器人整機、特種機(jī)器人、服務機器人、娛樂機器人、無人機、智能(néng)穿戴產品、機器人(rén)開發平台與軟件技術、機器人功能部件(jiàn)及零部件、機器人應用產品與(yǔ)智能工(gōng)廠全套解決方案、磨料、磨具、磨削、職(zhí)業教育裝備、3D打印技術及相關產品,以及智能裝備和製造技術相關的高端產品和新興技術。

投(tóu)稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業界視點
| 更多
")
行業數據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分(fèn)地區金屬切削(xuē)機床產量數據(jù)
- 2024年11月 軸承(chéng)出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源(yuán)汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月(yuè) 分地區金屬切削(xuē)機床產(chǎn)量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年(nián)8月 基本(běn)型乘用車(轎車)產量(liàng)數據
博文選萃
| 更多
- 機械加工過程(chéng)圖示
- 判(pàn)斷一台加工中心精度的幾種辦(bàn)法
- 中走絲(sī)線切割(gē)機(jī)床的發展趨勢
- 國產數控係統和數控機床何去(qù)何從?
- 中國的技術工人都去哪裏(lǐ)了?
- 機械老板做了十(shí)多年,為何還(hái)是小作坊?
- 機(jī)械行(háng)業最新自殺性營銷,害人害己!不倒閉才
- 製造(zào)業大逃亡(wáng)
- 智能時代,少談點智造,多談點製造
- 現實麵前(qián),國人沉默。製造業的(de)騰飛,要從機床
- 一(yī)文搞懂數控車床加工刀具補(bǔ)償功能
- 車床鑽孔攻螺紋加(jiā)工(gōng)方法及工裝設計
- 傳統鑽削與螺旋銑孔(kǒng)加工工藝的區別