機床")



基於 KUKA 弧焊機器人的盾構機關鍵(jiàn)部件焊接工作站
2017-12-6 來源: 中國鐵建 北京石油化工 庫卡機器人 作者:孫章龍(lóng) 黃繼強 楊(yáng)列峰(fēng) 薛龍 黃軍芬 等
摘要(yào):針(zhēn)對盾構機關鍵(jiàn)零部件的焊接特點,基於 KUKA 弧焊機器人研製了自動化(huà)焊接工作站。利用焊接機器人接觸(chù)尋位(wèi)、多層多(duō)道焊和電弧跟(gēn)蹤等(děng)功能實現盾構機聯體刀座工件的自動焊接。焊接實(shí)驗結果表明,所研製的盾構機關鍵零部件焊接工作站能夠滿足(zú)離散(sàn)製造企業的零部件小批量自動化(huà)焊接生產。
關鍵詞:盾構機;弧焊機器人(rén);電弧傳感跟蹤;接觸尋位;多層多道焊
0 前言
盾構機刀盤是(shì)盾構機的核心部件,因(yīn)其工作環境惡(è)劣,受力情況複(fù)雜,對其設計和製造加工過程有較高的要求[1]。刀箱、刀座是(shì)刀盤上安裝滾刀的關鍵部件,一般采(cǎi)用厚板拚接組焊而成(chéng),焊接工序(xù)是其加工的關鍵工序,焊接工作量大,但因為盾(dùn)構機為非(fēi)標定製產品(pǐn),難以形(xíng)成(chéng)流水式生(shēng)產作業模式。國內盾構機製造廠家在處理此類產品時還是采用(yòng)手(shǒu)工生產作業,焊工勞動強度大,焊接質量一致性差,同時伴(bàn)隨(suí)著熟練焊工數量逐年減少,給盾構機廠家提出了較大的挑戰(zhàn)。
本研(yán)究以 KUKA 弧焊機器人為基礎,開發盾構機刀箱、刀座(zuò)焊接工作站,以期探索盾構機等類似行業部件(jiàn)製造新(xīn)模式,推進離散製造企業自動化、智能化水平的提升。
1、 焊接工作站係統構成
刀箱、刀座多為箱形部件,由厚板拚接而成(chéng),采用熔化極氣體保護焊方法,需要進行多層(céng)多道焊接,同(tóng)時為了減小變形,盡可能對稱焊接[2-3],工件在焊接加工過程中需要反複變換空間位置。
根據刀箱、刀座焊接加工特點(diǎn)和要求,焊接工作站采用六軸(zhóu)關節機器人配合移動(dòng)導軌和(hé)旋轉變位機(jī)組合協同方案。機器人(rén)采用 KUKA 5 arc 型六軸弧焊機器人,其最大臂展 1.41 m①,不能直(zhí)接用於較大部件的焊(hàn)接,通過搭載移動導軌擴大機器人焊接工作範圍,以適應不同大小工件的(de)自動化焊接;旋轉(zhuǎn)變位機夾持待焊工件,並可帶動工件 0~360°旋轉,為機器人焊接創造合適的空間位置。六軸機器人、移動導(dǎo)軌和旋轉變位機的各驅動軸可以協同(tóng)聯動,方便弧(hú)焊機器人統一編程、協同作業。
刀箱、刀座焊接工作站布置如圖(tú) 1 所示。
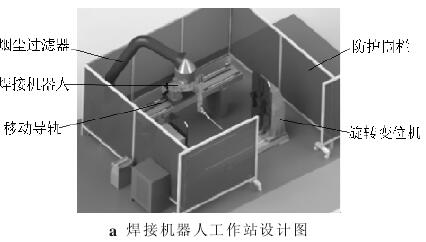
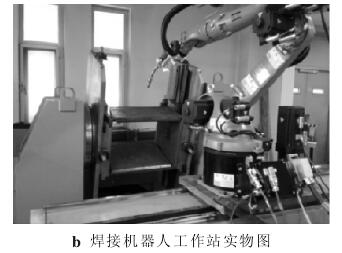
圖 1 焊接機器人工作站
2、 焊接關鍵技術
2.1 焊接工序(xù)
以(yǐ)聯體刀座焊接為(wéi)例,因(yīn)涉及厚板焊接,在考慮對稱施焊的同時,需(xū)要將厚板多層多(duō)道(dào)焊接技術、機器人離線編程技術等技術相結合(hé)完成工件施焊。如圖 2所示,借助離(lí)線編程技術,焊接機(jī)器人先(xiān)行完成 1~12 打底焊縫及 26/27/30/31/34/ 35/38/39/42/43/46/47 角焊縫第一道。完成後,利用旋轉變位機搭載工(gōng)件旋轉 180°後(hòu),再借助離線編程技術和多層多道焊接技術(shù)按照順序完成(chéng) 13~24 焊縫(féng)以(yǐ)及 25/28/29/32/33/37/40/41/44/45/48 角焊縫的焊接(jiē)。
然後,變(biàn)位機再反向旋轉 180°,工件位置恢複到初始位置,機器人再按順(shùn)序焊完 1~12 焊縫及 26/27/30/31/34/35/38/39/42/43/46/47 角焊(hàn)縫剩下的焊道,從而減小刀座焊接施工中產生(shēng)的變形量和焊接應力。
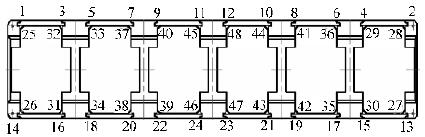
圖 2 聯體(tǐ)刀(dāo)座(zuò)的焊接順(shùn)序
2.2 接觸(chù)尋位
盾構機(jī)刀座等部件由多個零件拚裝而成(chéng),因拚裝誤差等原因,每個部件的焊(hàn)道可能會存在差異,不能(néng)直接調(diào)用(yòng)已編好的程序進行焊接,在焊(hàn)接前需要通過接觸(chù)尋位來獲得當前焊(hàn)縫的信息,以實現自動焊接。
焊(hàn)接(jiē)機(jī)器人(rén)的接觸尋位通過機器人在焊(hàn)絲上疊加一個 24 V 信號,當焊絲接觸到工(gōng)件,則通過焊絲形成(chéng)電流回路,通過傳感器發(fā)送回機器人,機器人記錄下焊絲(sī)與工件(jiàn)接觸時所處點的位置。
重複動作(zuò)使機器人在一個平麵上獲取三點(不在同一條直線上),就能獲得工件平麵的坐標位置,同(tóng)樣利(lì)用接觸尋位的傳感方式,可獲得待焊坡口位置(zhì)、方向和起(qǐ)始(shǐ)點,方便機器人自動搜尋焊縫位置並進行自動焊接。
2.3 多層(céng)多道焊
盾構機的許多零部件(jiàn)均是由厚板拚接而成,由於材質和焊接質量等要求,不能采用效率(lǜ)較高的埋弧焊,通常采用熔化極氣體保護焊,在(zài)單個(gè)焊縫實施多(duō)層多(duō)道焊接。
手工進行多層多道焊接時,需要基於焊工(gōng)的經驗(yàn)規劃焊道並保持合適的焊槍位姿。機器人進行(háng)多層多道焊(hàn)時,關鍵也是要保(bǎo)證合理的焊道規(guī)劃和合適的焊槍位姿(zī)。
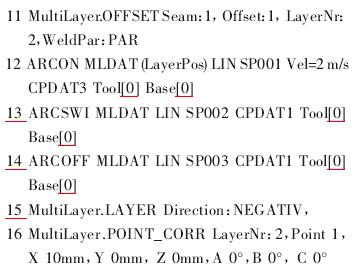
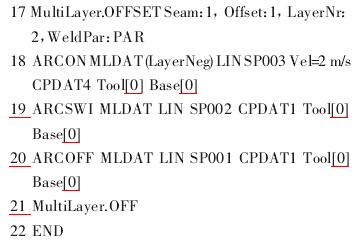
本研究基(jī)於KUKA弧焊(hàn)機器人提供(gòng)的多層多道焊軟件包 KUKA.Multi-Layer 工藝程序包,以根部焊道軌跡為基礎,通過編程的偏移量計算出新的焊道軌跡,並根據坡口形式
優化(huà)焊接機器人的位姿。
基於 KUKA.Multi Layer 工(gōng)藝程序包編寫的一段自動完成兩道焊縫焊接的程序如下。
2.4 電弧(hú)傳感跟蹤
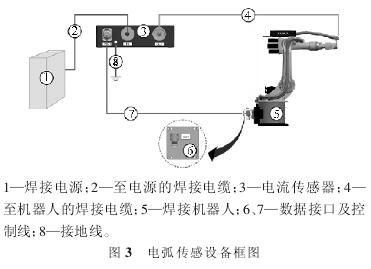
盾構機零部件在加工、裝配過程中的尺寸誤差,位(wèi)置偏差以及工件加熱變(biàn)形(xíng)等因素會造成接頭位置偏離示教路徑,有時需修(xiū)正原有的軌跡。KUKA 提供的 Arc Sense 工藝程序包借助電弧傳感提供焊縫高低和左右信息,修正原來示教軌(guǐ)跡以適應工件(jiàn)實際焊接需求(qiú)。Arc Sense 通過焊接過程中電流變化獲得實際焊接過程中電弧的變化記錄,結合焊槍的(de)擺動可以確定和糾正其與(yǔ)實際軌(guǐ)跡中心(xīn)的偏差(chà)。電弧跟蹤框圖如(rú)圖 3 所示
3 、焊接實驗
采用研製的焊接工作站進行聯體刀座的(de)實際焊接,采用交替焊接順序進行對稱施焊,利用接(jiē)觸尋位技(jì)術初始定位,將電(diàn)弧跟蹤和(hé)多層(céng)多道自動焊技術相結合,完成一個五聯體刀座的焊接,焊(hàn)接完成的(de)工件如圖 4 所示。
實(shí)驗證明,開發的焊接工作站係統能夠滿足相對複雜的工件多焊縫、多層多道對稱(chēng)施焊。同時配合不(bú)同的安裝卡具,焊接工作站可以進行(háng)其他種類(lèi)工件的自動化焊接,從(cóng)而適應離散製造(zào)企業進行零部(bù)件小批量自動化焊接生產(chǎn)的需求。

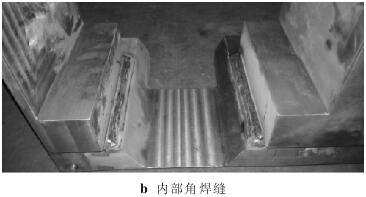
圖 4 拚焊完成的聯體刀座
4 、結論
(1)針(zhēn)對盾構機(jī)關(guān)鍵零部件(jiàn)的焊接特點,以KUKA弧焊機器人為核(hé)心,研(yán)製出盾構機(jī)零部件自動(dòng)化焊接工作站。
(2)利用焊接機器人接觸尋位、多層多道焊和電弧(hú)跟蹤等功(gōng)能實(shí)現盾構機(jī)聯體刀座工件的自動焊接,驗證了所研製的盾構機(jī)關(guān)鍵零部件焊接(jiē)工作站能夠滿足離散製造企業(yè)的零部件小批(pī)量自動化焊接生產。
投稿箱:
如果(guǒ)您有機床行(háng)業、企(qǐ)業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯係(xì)本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
如果(guǒ)您有機床行(háng)業、企(qǐ)業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯係(xì)本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
查")
行業(yè)數據(jù)
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年(nián)11月 分地區金屬切削機床(chuáng)產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月(yuè) 新能源汽車產(chǎn)量數據(jù)
- 2024年11月 新能(néng)源汽車銷量情況
- 2024年10月(yuè) 新能源汽車產量數據
- 2024年10月 軸承出(chū)口情況
- 2024年10月(yuè) 分地區金屬切削機床(chuáng)產量數據
- 2024年10月 金(jīn)屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源(yuán)汽車產量數(shù)據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據
博文(wén)選萃
| 更多
- 機(jī)械加工過(guò)程圖示
- 判斷一(yī)台加工中心精(jīng)度的幾種(zhǒng)辦法
- 中走絲線切割機床的發展趨勢
- 國產數控係統和數(shù)控機床何去(qù)何從?
- 中國的(de)技術工人都去哪裏了?
- 機械老板做了十多(duō)年,為何還是小作(zuò)坊?
- 機械行業最(zuì)新自殺性營銷(xiāo),害(hài)人害己!不倒閉才
- 製造業大逃亡
- 智能時代,少(shǎo)談點智造,多談點製造
- 現實麵前(qián),國人沉默。製造業的騰飛,要從機床
- 一文搞懂數(shù)控車床(chuáng)加工刀具補償功(gōng)能(néng)
- 車床鑽孔攻螺紋加(jiā)工方法及工裝設計
- 傳(chuán)統鑽削與螺旋銑(xǐ)孔加工工藝的區別