



基於視(shì)覺捕捉的網球自拾取機器人係統
2017-8-10 來源:江南大學 機械工程學院(江蘇 無錫) 作者: 孫世俊 平雪良 曾慶(qìng)鈺 董涵清 官樂樂
摘(zhāi) 要: 為了規避網球比(bǐ)賽的(de)風險,提高效率,開發(fā)了一套基於視覺捕捉的網球自動拾取(qǔ)機器人係統,由移(yí)動機器人平台搭載機械臂自由(yóu)移動對散落(luò)在網球場地的網球進行偵(zhēn)測並拾取。采用基於 ARM 的硬件架構搭建移動機器人的控製係(xì)統平台,並通過網絡控製接口與機器人平台上的圖像(xiàng)采集(jí)與(yǔ)識別模塊實現(xiàn)通信; 將視覺采集捕捉到(dào)的網球的(de)位置信息傳(chuán)送給(gěi)控製器,控製移動機器人移(yí)動定位,機械臂配合(hé)實現網球拾取。經模擬(nǐ)網球場運行證明設計(jì)方案可行,視覺的引入節省了大量的人力與時間。開發的(de)網球自拾(shí)取機器人(rén)係統(tǒng)有很強的實(shí)用性,具有一定的推廣意義(yì)。
關 鍵 詞:移動機器(qì)人; 視覺捕(bǔ)捉; 網球識別(bié)定位; 機械(xiè)臂
日常(cháng)網球訓練(liàn)中,為了提高訓練效果,減輕運動員和(hé)教練員的負擔,在網球比賽中最大限度(dù)地規避球童受傷的風險,研究人員想到了(le)用機器人來拾取網球。一般情況下,該技術主(zhǔ)要包括以下內容:
①.機器人的路徑規劃。
路徑規劃技術是機器人控製技術研究中一個(gè)十分重要的問(wèn)題,到目前為止,研究方法主要有傳統方法和智能(néng)法 2 大類。傳統的路徑規劃方法———自由空間法、圖搜索法、刪格(gé)解耦法和人工勢場法等; 智能路(lù)徑(jìng)規劃的方(fāng)法———基於模糊(hú)邏輯的機器人路徑規劃和基於神經網絡方法的機器(qì)人路徑(jìng)規(guī)劃等[1-2]。
②.網球(qiú)的定位問題,目前市場上機器人係統的目標定(dìng)位多基於圖像處理的方法[3-4],也有基於單目視覺的機器人定(dìng)位方法[5],這些方法對圖(tú)像處理的要(yào)求精度較高,算(suàn)法也相對複雜,並不適(shì)用(yòng)於(yú)普通工程技術人員的編程和操作,難以實現。
③.網(wǎng)球的抓取功能,目前市場上撿球機器人所采用的夾持器以虎鉗式為(wéi)主,夾持精度(dù)不高,運(yùn)動效率低,而(ér)專業化的機械(xiè)臂價格昂貴,功能多(duō)樣化,可 以完 成 機 械(xiè)臂在非特定(dìng)環(huán)境下的自主抓取(qǔ)[6]。目前國內已(yǐ)有一部分可以拾取網球(qiú)的機器人,但還沒有基於(yú)真實環境(jìng)的機型[7]; 現有(yǒu)的機器人采用的抓取方法主要以虎鉗式為主,所用夾持器隻有 2 ~ 3個自由度,自由度(dù)不高,作業半徑小。國外現有的拾(shí)取網球機器人隻能實現半自動化,無法獨立自主找到(dào)散(sàn)落的球(qiú)並完成撿拾,而且因為體型過於龐大,無法運用於賽場。總體(tǐ)來說,國(guó)內外在通過移動平台撿拾網球上的技術還是不夠成熟,提升(shēng)空間很大,同時,它的市場前(qián)景又相當廣(guǎng)闊(kuò)[8]。針對以(yǐ)上存(cún)在的問題,本文在以(yǐ)往方法的(de)基礎上,改善網球自(zì)拾取過程的各個環(huán)節,提出一種基於(yú)視覺捕捉的網球自拾(shí)取(qǔ)方法,並(bìng)設計整體方案,搭(dā)建物理樣機,開發(fā)出一套造價低廉,控製精度較高,適(shì)用於(yú)市場的網球拾取機器人係統,即移動機器人與機(jī)械臂聯合平台,並進行效果驗證。
1. 總體方案設(shè)計
用機(jī)器人拾取網(wǎng)球,需要解決(jué)以下幾個問(wèn)題: ①機器人的路(lù)徑(jìng)規劃問題; ②機器人定位問(wèn)題,有了準確的定位,才能讓移動機器人平台進行精確地導航; ③如何實現網球的(de)抓取問題。目(mù)前國內的網球拾取機器人主要通過傳感器獲取網球的信息,利用嵌入式係統控製車身運動,搜尋(xún)網球並利用特(tè)殊的拾球(qiú)機構拾取(qǔ)網球[9],拾取效(xiào)率低(dī),識別精度也不高。國外的網球拾取(qǔ)機器人功能結構複雜,造價昂貴,並不適用於市場的投放[10]。
本(běn)文利用一台全方(fāng)位移動平台作為機器人(rén)框架(jià)的(de)主體,係統利用紅外傳感器(qì)以及無刷電機的差速轉動實現循跡,利用超聲波傳感器進行測距,並(bìng)通過對收集到的數據(jù)信息進(jìn)行處理(lǐ)與分析而實現避障,很好地解決了機(jī)器人(rén)的(de)路徑(jìng)規(guī)劃問題。針對機器人定位(wèi)問題,本文采用圖像識別(bié)模(mó)塊作為定(dìng)位傳感器; 由於周圍環(huán)境的雜(zá)色對機器人定位算法有一(yī)定的影(yǐng)響,通過分析幾種常見的距(jù)離判斷算法,經過(guò)實驗,為機器人規劃出一塊確定的運動(dòng)與識別(bié)區域實(shí)現了機器人的定位功能。針對網球(qiú)的抓取,本文在移(yí)動機器(qì)人平(píng)台上搭載一個六自由度機械手( 為簡化算法,本文(wén)隻用了其中 3個自由度) ,根據圖像識別模塊得到的網球(qiú)中心位置的 x,y 坐標值,計算出機械手各個關節抓取網球時需要轉動的角度(dù) θ,根據串口中讀出的網球的寬度和高度計算出網球在圖像中的麵積,通過判(pàn)斷麵積的(de)大小,給機械臂發送抓取指令。具體方案如圖 1 所示。
2 .視覺捕(bǔ)捉與抓取
2. 1 視覺捕捉機器視覺
由於精確、快速和(hé)可數字化等優點被(bèi)廣泛應用,其一般工作原理為(wéi): CCD 照相機攝取檢測圖象並轉化為數字信號,再采用先進的計算機硬(yìng)件與軟件技術對圖象數(shù)字信號進行處理,從而得到所需要的各種目標圖象特征值,並由此實現模式識(shí)別、坐標(biāo)計算、灰度分布圖等多種功能。再根據其結果顯示圖象、輸出數據、發出指令,配合執行機構完成位置調整、好壞篩選和數據統計等。
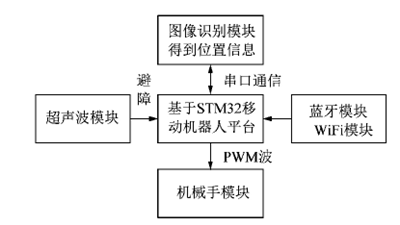
圖 1 總(zǒng)體方案
Figure 1 Overall program
本文采用圖像采集識別(bié)模塊,該模塊提供了 API函數供(gòng)係統調用,通過識別網(wǎng)球(qiú)的(de)顏色( 灰度值) ,調用相應的函數可得到網球的寬度(dù)、高度、中心點的 x,y坐(zuò)標。本文設定視窗捕捉範圍 x 方(fāng)向為(wéi) 0 ~ 360 mm,y方向 0 ~ 200 mm,通過串口監視器可以觀察到所獲得的位置信息,如圖(tú) 2 所示。
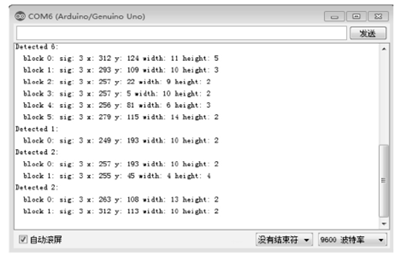
圖 2 獲得的位置信息
Figure 2 Position information obtained
2.2 自動抓取
圖像處理後小車可以實現對網(wǎng)球的實時追蹤。由於距離的不同,視野中各個網球的麵積不是一個定值,網球與機器人距離較遠時,計(jì)算得到的網球麵積較(jiào)小,距離較近(jìn)時,計算得到的網球麵積較大。通過計算識別得到網球的(de)麵積,同時判斷(duàn)小車與(yǔ)網球的距離(lí),當(dāng)網球麵積達到設定值,調動機械手實現網(wǎng)球的抓取,如圖3 ~ 4 所示。
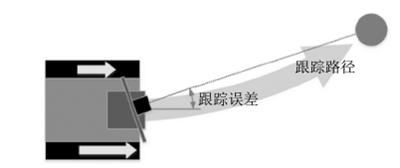
圖 3 抓取(qǔ)網球示意圖
Figure 3 Crawl tennis schemati
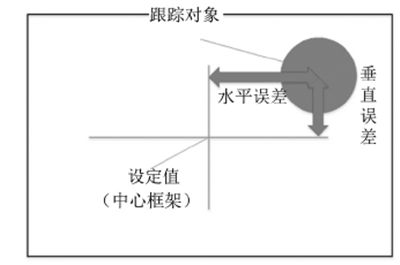
圖 4 運動原理圖
Figure 4 Schematic of motion
3 .實驗係統開發
3.1 硬件開發
為實現網球機器人在球場中的移(yí)動,本文參照自主研發的全方位移動平台,采用基於 ARM 的機器(qì)人控製硬(yìng)件體(tǐ)係結構; 為了使機器人快速、準確地(dì)識別目標,采用(yòng)高性能的圖像采集(jí)識別模塊; 網球抓取采用(yòng)簡易機械臂實現(xiàn)。機(jī)器人通過網(wǎng)絡控製接口與移動平(píng)台上的圖像采(cǎi)集與識別模塊實現通(tōng)信,將捕捉到的位置信息傳輸到係統(tǒng)控製移動平(píng)台,使機(jī)械臂實現移動定位和網球拾取。係統硬件主要由基於 ARM Cortex-M3 的 32 位微處理器 STM32F103ZET6 芯片組成,該芯片主頻 72 MHz,擁有 256 k B Flash,48 k B SRAM,且外設資源豐富,擁有多種(zhǒng)定時器,支持 SPI,I2C,USART,USB,CAN 等接口; 係統還選(xuǎn)用 Pixy Cmu Cam5 圖像識別模塊並搭載了超聲波傳感器、紅外傳感器、藍牙模塊和 Wi Fi 控製模塊等,機器 人 總 體 硬 件 結 構 如 圖 5所示。
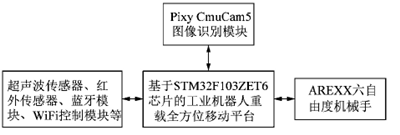
圖 5 機器人硬件結構(gòu)
Figure 5 Robot hardware structure
機器人移動平台選用兩輪獨立驅動(dòng)方式,驅動電機為無(wú)刷直流電機,由 BLCD-5015A 驅動器控製,機械手選用 AREXX 的六自由度機械手,可實現多角度抓取( 本文僅用其中 3 個(gè)自由度; PixyCmuCam5 是一個開源的圖像識別傳感器,支持多物體多色彩的顏色識別,支持 SPI,I2C 等多(duō)種通信方式,其搭載的圖像識別模塊可以以(yǐ) 1 MB /s 的速度發送塊 信(xìn)息 給 ArduinoUNO 板,每秒可以(yǐ)發送(sòng)超過6 000 個識別的物體或每幀 135 個被識別的物體。
3. 2 軟件開發
本文軟件的(de)組成大(dà)體可以分(fèn)為 3 個(gè)部分:
1) 基(jī)於 STM32 的移動機器人控製軟件。主要解決機器人的路徑規劃、超(chāo)聲波壁障及 Wi Fi 和藍牙控製等(děng); 整個係統的工作模式是上位機通過 SPI 將無線模塊 NRF24L01 接入 ARM 處理器,同時將搖(yáo)杆 ADC 控製(zhì)模塊初始化。ARM 處理器(qì)可以對操作(zuò)人員在液晶顯(xiǎn)示屏上輸入的指(zhǐ)令進行分析與識別,並將指令傳送給下位,同時還可以通過 USART 串口與計算機通信。
2) 圖像(xiàng)識別模塊。通過 Pixy Cmu Cam5 攝像頭可以(yǐ)直接獲取網球的位置(zhì)信息( 網球中心位置的 x 和 y坐標,被識別網(wǎng)球的寬度、高度) ,並將獲取的信息通過 ISCP 通(tōng)信端口發送到 Arduino IDE 開(kāi)發板。
3) Arduino IDE 開發板與 STM32F103ZET6 芯片的通信。由於本文(wén)的 2 塊開(kāi)發板(bǎn)類型不同,故通過 ArduinoIDE 開發板的 TX,RX 通信端口實現 2 塊板子的通信。圖 6 為主程序流程圖。
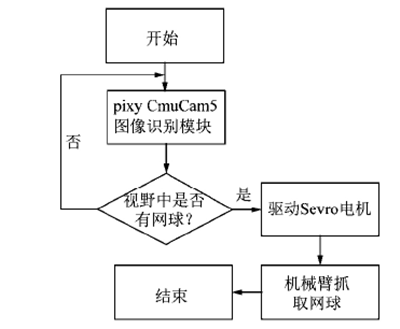
圖 6 主程序流程圖
Figure 6 Main program flow chart
3. 3 實驗驗證與分析
本文搭建了移動機器人樣(yàng)機,並在多種(zhǒng)場合進行了測(cè)試,機器人可以精確地識別網球的位置並反饋給機械手; 在視野中如果沒有發現網球,攝像頭會自動調用子程序轉動舵機尋(xún)找各個方位網球的位置,實現了網球的(de)高效、精準地抓取,如圖 7 ~ 8 所示。
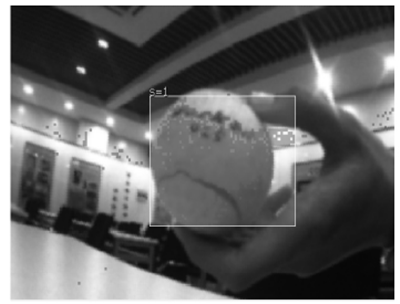
圖 7 成(chéng)功捕捉到網球
Figure 7 Tennis successfully captured

圖 8 實驗室測試
Figure 8 Laboratory tests
雖然市麵上已經出現網球(qiú)撿拾(shí)機器人(rén),但國內大多數是運用傳感器(qì)進行識別,紅外線進行定位,由於識別距離有限,響應速度有一(yī)定的延遲。國外運用高精度 CCD 攝像頭進行識別的(de)網球撿拾機器人,雖然精度高,但是價格昂貴,使用成本太(tài)高,不適合投入市場大量運用。而本文所搭建的機器人小(xiǎo)車運用 的 PixyCmu Cam5 攝像頭,價格適中(zhōng),性價比高,並且可以做(zuò)到快速識別(bié)。同時本文沒有采用常規的真空吸取、依靠慣性等撿取網球的方式,而是運用了機械手,雖然增加了成本,但大大提高了撿球效率,可以高效而又精準地實現抓取動作。
4 .結語
本(běn)文設計開發的基於視覺捕捉(zhuō)的網球自動拾取機器人(rén)係統,解決了耗費人力資源而且人工(gōng)撿球效率低的問題。在研究過程中(zhōng),機器(qì)人的路徑規劃問題一直是一個難點。機器人在運行(háng)過程中有時會偏離運行軌跡,要提高機(jī)器人運動精度,需要軟件和硬件協調配(pèi)合,這在後期的工作中需(xū)要進一步(bù)加強。本係統具有廣闊(kuò)的應用前景,可以用在任(rèn)意網(wǎng)球場地。經技術完善後,可以在標準化的網球場上(shàng)的 4個角落放(fàng)置 4 台機器人,組成一個撿拾網球的(de)局域網係統,通過一個中央處理(lǐ)器計算(suàn)整合,可高效而又準確地完成(chéng)撿拾網球並退回原位等一係(xì)列動作(zuò)。
參考文獻:
[1] 張穎,吳成東,原寶龍. 機器人路徑規劃方法綜述[J]. 控(kòng)製工程,2003,10( 增刊(kān) 1) : 152 - 155
[2] 趙曉東,鮑方. 清潔機器人路徑規劃算法研究綜述[J]. 機電工程,2013,30( 11) : 1440 - 1444.
[3] 張俊強,張(zhāng)華. 基於圖像處理(lǐ)的移動機器人對目標(biāo)的識別和定位[J]. 計算機測量與控製,2006,14( 5) : 673 - 675.
[4] 彭惠青,李海燕. 機器人視覺定位(wèi)的圖像處理[J]. 計算技術與自動化,2004,23( 1) : 74 - 76.
[5] 於乃功,黃燦,林佳. 基於(yú)單目視覺的機器人目標定位(wèi)測距方法(fǎ)研究[J]. 計算機測量與控製(zhì),2012,20( 10) : 2654 - 2656.
[6韓崢,劉華平,黃文炳,等. 基於 Kinect 的機械臂目標抓取[J]. 智能(néng)係統學報,2013,8( 2) : 149 - 155.
[7] 席澤生. 網球場撿(jiǎn)球機器人係統設計[J]. 機械製造與自動化,2012,41( 2) : 140 - 141.
[8] 唐瑩. 智能網球拾取機器人的(de)市場分析: 以創睿(ruì)智能網球機器人有限公司為例[J]. 職業,2012( 17) : 148 - 149.
[9] 於剛,唐小川. 智能拾取(qǔ)網球機器人[C]/ /第二屆全(quán)國大學生創新論壇論文集. 南京: 東南(nán)大學出版社,2009.
[10] MAO Yanbing. Design of tennis picking intelligent robot orientationsystem[J]. Machine building & automation,2009,38( 2) : 54.
投稿箱:
如果您(nín)有機床行業、企業(yè)相關新聞稿件發表,或(huò)進行資訊合作(zuò),歡(huān)迎聯係本(běn)網編(biān)輯部(bù), 郵箱:skjcsc@vip.sina.com
如果您(nín)有機床行業、企業(yè)相關新聞稿件發表,或(huò)進行資訊合作(zuò),歡(huān)迎聯係本(běn)網編(biān)輯部(bù), 郵箱:skjcsc@vip.sina.com
更多相關信息
金(jīn)馬")
業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床(chuáng)產量數(shù)據
- 2024年11月 分地(dì)區金屬切削機床產量數(shù)據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年(nián)11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數(shù)據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床(chuáng)產量數據
- 2024年9月(yuè) 新能源汽車銷量情況(kuàng)
- 2024年8月 新能源汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據
博文選(xuǎn)萃
| 更(gèng)多
- 機(jī)械加工過程圖示
- 判斷一台加工中心精度(dù)的幾種辦法
- 中走絲線切割機床的發展趨勢(shì)
- 國產數控係統和(hé)數控機床何去何從?
- 中國的技術工人都去哪裏(lǐ)了?
- 機械老板做(zuò)了十多年,為何還是小作坊?
- 機械行業最新(xīn)自殺性營銷,害人害己!不倒閉才
- 製造業大逃亡
- 智能時代,少(shǎo)談點智(zhì)造,多談點製(zhì)造
- 現(xiàn)實麵前(qián),國人沉默。製(zhì)造業的騰飛,要從機床
- 一文搞(gǎo)懂數控車床(chuáng)加工刀(dāo)具補償(cháng)功能
- 車床鑽(zuàn)孔(kǒng)攻螺紋加工方法及工裝設(shè)計
- 傳統鑽削與螺旋銑孔加工工藝的區別