



車載液壓機械臂結構分析及(jí)設計
2017-4-28 來源:永(yǒng)城職業學院機電係 作者:楊曉敏
摘要:機械臂的主要功能是將末端執行器送到一個(gè)所期望的目標位置處,末端執行器完成夾(jiá)持、裝載、吊取等工作後,再將(jiāng)末端執行器及物品送(sòng)至下一個(gè)所期望的目標位置(zhì)處,末端執行器自動卸載或人工卸載物品,從而完成(chéng)物品轉載工作。現介紹機械臂的組成和分類,並在總結車載(zǎi)液壓機械(xiè)臂設計依據和性能要求的基礎上,對其設計方案進行分析和確定。
關鍵詞(cí):車載;液壓機械臂;結構;設計方案
1.機(jī)械臂的組成
機械臂(bì)係統一般由執行係統(tǒng)、驅動係統(tǒng)和控製係統三大部分(fèn)組成。執行係統是可以將工作對象取放到目(mù)標位置處(chù)或對其進行操作的機械裝置,由末端執行器、腕(wàn)部、臂部和機座組(zǔ)成。其中,末(mò)端執行器是與工作對象接觸(chù)以完成(chéng)操作任務的裝(zhuāng)置。腕部主要用來確定末端執行器的位姿(方位和姿勢)和(hé)擴展機械臂的臂展(zhǎn),某些機械臂可(kě)以沒有(yǒu)腕(wàn)部而將末端執行器直接安裝在臂部的末端。臂部一般由關節和(hé)連杆組成,是用以(yǐ)攜帶腕部與末端執行器,使末端執行(háng)器到達目標位置的部件(jiàn)。機座主要將整個機(jī)械(xiè)臂機構與其他機(jī)構或地麵連接在一起,是執(zhí)行係統中相對固定並能承受相應的力(lì)的部件。驅動係統是機械臂係統的動力裝置,用以向各個運(yùn)動部(bù)件供給(gěi)動力,動力源一般為液壓、氣壓或電氣。
液壓驅動具有在一定的作業空間內提供大驅動力和(hé)驅動力(lì)矩的能力,調速簡(jiǎn)單平穩,能夠實現(xiàn)無級調速,在安全閥的作用下還可簡單(dān)有效地實現過載保(bǎo)護,已經被大多(duō)數(shù)車載機械臂所采用。氣壓驅動具有快速、氣源方便、緩衝作用好、無汙(wū)染等特點,但(dàn)其工作(zuò)壓力偏低,功率重量比(bǐ)小,速度不易控製(zhì),噪音大,衝擊大,一般用於驅動力較小、精度要求(qiú)不高(gāo)的(de)場合。電氣驅動的特點是電源(yuán)方便,利用電動機產生(shēng)力和力矩,功率重量比較大,信號傳遞迅速精準,響應快,效率高。控製係統是機械臂(bì)的操控中心,控製驅動係統驅使執行係統按預定動作完成任(rèn)務。
2.機(jī)械臂的分類
機械臂可以根(gēn)據其坐標方式、驅(qū)動方式、關節連接方式以(yǐ)及用途進行分類。坐標方式是指機械臂在運動時所取的參考坐標係的形式,主要有直角坐標(biāo)型、圓柱坐標型、極坐標型和關節型。
(1)直角坐標型機械臂通過在直(zhí)角坐標軸上的移(yí)動來使末端執行器(qì)到達預定位置,這種(zhǒng)動作(zuò)使其形(xíng)成一種“伸縮—伸(shēn)縮—伸縮”的(de)運動形式。其特點是結構相對簡單,定位精度較高,運動軌跡由立方體首尾相連的直角邊組成,直觀性強,但(dàn)所占空間較大而工作範圍較小,且慣性大(dà),靈活性差。
(2)圓柱坐標(biāo)型機械臂是由直角坐標型機械臂機座位置的移動副改變成回轉副而得來。圓柱坐(zuò)標型機(jī)械臂的(de)運動形式為“回轉—伸縮—伸(shēn)縮”。與(yǔ)直角坐(zuò)標型相比,在相同的條件下所占(zhàn)空間較小,其他特點基本相同。
(3)極坐(zuò)標(biāo)型機械臂在(zài)運動中存在回轉、仰俯、伸縮動作,工作空間可以形成一個球體,又稱為球坐標型機械臂。該型機械臂的主要特點是(shì)結構緊湊,剛度好,具(jù)有較大的抓持能力,末端執行器活(huó)動靈(líng)敏、運動範圍大,但結構較為複雜,運動(dòng)精度較低,且運動控(kòng)製困難。
(4)關節型機械臂的運動主要由旋轉與回轉兩種形式組成,其特點是動作靈敏、通用性強,在相同的工作(zuò)條件下(xià)運行(háng)範圍最大,能夠抓取靠近機座的工作對象,同時可(kě)擬合操作空間內的任意曲線。根據驅(qū)動方式可將機械(xiè)臂分為液壓驅動、氣壓(yā)驅動、電力驅動、機械傳動等類型。根據(jù)關節連接方式可分為串聯結構、並聯結(jié)構、混聯結構型機器臂。串聯型機械臂因其具(jù)有動作(zuò)靈敏、通用(yòng)性強等與關(guān)節型機械臂(bì)相似的(de)結構特點,在工業領域中受到廣泛應用。根據用途可將機械臂分為專用機械臂、通用機械臂兩類。
3.車載液壓機械臂(bì)的設計(jì)依(yī)據和性能要求
本課題所研究的對象———車載液壓機械臂(bì)的設計參數如(rú)表 1 所示 ,它的主要任務是使用專用夾持器夾持大小為準560×H900的工件進行轉(zhuǎn)載作業。經調(diào)研(yán)發現,市場上沒有能夠完全滿足公司轉載工作(zuò)要求(qiú)的車載機械臂,要麽(me)最大臂展不夠,要麽最大轉載能力滿足不(bú)了需求(qiú)。因此,需要(yào)專門設計一台這樣的車(chē)載液壓機械(xiè)臂。
表1 機械(xiè)臂(bì)的設計參數

車載液壓機械臂所要完成的是重物轉載工作,在其設計過程中不僅有設計參數(shù)的限製(zhì),還有特殊的工作性能(néng)要求:
(1)在質量條件滿足的情況下,要有足夠的剛度、強度,避免轉載過程發生塑性變形,反(fǎn)複工作失去轉載能力。(2)由於其安裝在車輛上,空間有限,設計時要盡可能實(shí)現結構緊湊、體積小。(3)液壓驅動不可避免地存在液壓脈動頻率,結構(gòu)設計要避免發生共振(zhèn)現象,同(tóng)時轉載工作過程中不能出現明顯(xiǎn)的振動。
4.設計方(fāng)案分析(xī)
本課題所研究的車載機械臂基本動作為:啟動機械臂後,首先,機械臂整體旋轉一定角度,使末端執行器(qì)轉(zhuǎn)出車廂(xiāng)底板;然後,臂架(jià)伸展,同時使末端執行器下降,當末端執(zhí)行器(qì)下降到一定高度(dù)後,末端執行器夾手張開,臂(bì)架前伸,夾手到達合(hé)適位置後夾緊工件,臂架攜帶末端執行器及(jí)工件上升,高度超出車廂底板後停止上升(shēng),臂架回轉,使得工件處於車廂底(dǐ)板上方;最後,臂架前伸或後縮選擇最(zuì)優位置放置工件。基於(yú)連杆機構為麵接觸的低副機構,具有接觸(chù)麵所受的壓強小(xiǎo)、能夠承受較大的(de)載荷、抵抗衝擊(jī)能力強、組成連杆機構的各構件多為平麵和圓柱麵、便於加工製造、適應環(huán)境能力(lì)強、便(biàn)於實(shí)現各種複(fù)雜的運行軌(guǐ)跡等特點。為實現上述基本動作,本課題選(xuǎn)用連杆機構完成整體臂架係統的設計。比較(jiào)各類機械臂的優缺點,考慮液壓驅動的優點,本文所研究的對象將(jiāng)選用液(yè)壓驅動方式的(de)關(guān)節型機(jī)械臂。
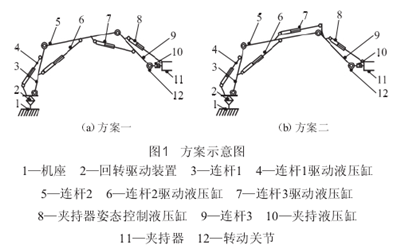
在研究過程中發現:若使用搖臂鋼索吊取工件進行轉載,仍需要人工調(diào)整工件姿態及放置位置;若使用兩個連杆組成臂架(jià)完成轉載作業,雖然能完成轉載(zǎi)工(gōng)作,但臂(bì)杆要承受較大的應(yīng)力,無形中(zhōng)增加了臂杆的壁厚(hòu),或者需要使用較貴的材料製作臂杆,並且兩連(lián)杆的機械臂不(bú)能(néng)充分利用靠近機座的空間(jiān),造成了(le)空間的浪費;四連杆機械(xiè)臂也(yě)能完成公司的轉載工作,但增加了控製難度(dù),3 700 mm的最大臂展使(shǐ)用四連杆(gǎn)來實現,由(yóu)於液壓缸基本尺(chǐ)寸的限製,需(xū)要專門定製液(yè)壓缸。因此,在研究過程中提出了兩種三連杆結構的可行(háng)性方案,總體方案示意圖如圖1所示。
5.方案確定
以上兩種方案均可(kě)滿足公司的設計要求,但從車載液壓(yā)機械臂設計的特殊工(gōng)作性能要求(qiú)考慮,方案二顯然要比方案一(yī)更加合理,從方案示意圖(tú)中便可看出,方(fāng)案二在空(kōng)間利用(yòng)方麵(miàn)要優於方案一。方案一中由於連杆3驅動液壓缸的限製,運動過程中連(lián)杆3和夾持器不能充分地接近機械臂機座,從而在轉載結束時將工件放置在靠近機械臂機(jī)座的位置處,而方案(àn)二就不存在這樣的問題。此外,在後續的研究(jiū)中發現(xiàn),依據(jù)方案一所設計出來的液(yè)壓型機械(xiè)臂(bì)低階固有頻率較低,極易受外界激勵作用發生共振現象。因此,在後續的研(yán)究過程中將依據方案二完成各項研究工作。
投稿箱:
如果您有機(jī)床行業、企業(yè)相關新聞稿(gǎo)件發表,或進(jìn)行資訊合作,歡迎聯係本(běn)網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
如果您有機(jī)床行業、企業(yè)相關新聞稿(gǎo)件發表,或進(jìn)行資訊合作,歡迎聯係本(běn)網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據(jù)
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新(xīn)能源汽車銷量情(qíng)況(kuàng)
- 2024年10月 新(xīn)能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切(qiē)削機床產(chǎn)量數據
- 2024年9月 新能源汽車(chē)銷量情況
- 2024年8月 新(xīn)能源汽車產量數據
- 2028年8月 基本(běn)型乘(chéng)用車(chē)(轎車)產量數(shù)據