



摘要:FANUC 數控立式加工中心故(gù)障修理過程,設備增量式編(biān)碼器返回參考點的工作原理,設備(bèi)不回參考點故障的(de)原因和排除方法。
關鍵詞:加工(gōng)中(zhōng)心;參考點;機床原點;編碼器
0 前言
配置FANUC 數控係統的機床可以實現增(zēng)量式編碼器返回參考點(diǎn), 絕對值編(biān)碼器返回參考點和距離式編碼器返回參考點等幾種方式。目(mù)前大多數(shù)數控機床采用增量式編(biān)碼器作為位置檢測元件,係統斷電後,工件(jiàn)坐標係坐(zuò)標值就(jiù)失去記憶,所以機床開機後要(yào)進行返回(huí)坐標係參考點操作。
1、 數控機床參(cān)考點與機械原點的去別及作用
參考點作(zuò)為工件坐標係的(de)原始參照點, 機(jī)床參考點(diǎn)確定後各工件坐標係(xì)隨之確立。機械原(yuán)點是基本機械坐標係的基準點,機械部件一旦裝配完畢,機械原點隨(suí)之確立。電氣原點是以機床(chuáng)檢測(cè)反饋元件發出的柵點信號或零標誌信號確(què)立的參(cān)考點。為了使電氣原點到機械原點的距離用(yòng)一個原點偏移量參數進(jìn)行設罩。這個重合的(de)點就是機床原點。
對(duì)於數控機床(chuáng),一旦參考點確立(lì)後,有3 個功能即可生效(xiào)。
①機械零點(#1240參數值(zhí))、坐標係零點(G54)。
②可使螺距補償功能生效, 用於消除絲杠(gàng)間隙的累(lèi)積誤差(chà)及絲(sī)杆螺距誤差對加工的影響。
③可使數控機床行程軟限(xiàn)位(wèi)功能生效即(jí)修改(gǎi)參數#1300 行程檢(jiǎn)測。
2 、數控機床回參考點方式
現代數控機(jī)床一般都采用增量式旋轉編碼器或增(zēng)量式光柵尺(chǐ)作(zuò)為位置(zhì)反饋元件, 因而機床在每次開機後都必須首先進行回參考點的操作(zuò),以確(què)定機床的坐(zuò)標原點,尋棧參考點主要與零點開關、編碼器或者光柵尺的零點脈衝有關,一般有2 種(zhǒng)方式。
(1)軸向預定方向快速運動,壓下零點開(kāi)關後減速向前繼續運動,直到數控係統收到(dào)第一個零點脈衝軸停止遠(yuǎn)動,數控係統自動設定坐標值。在這種方式下, 停機時軸(zhóu)恰好壓在(zài)零點開關上,如果采用自(zì)動回參考點,軸的運動方向與上述的(de)預定方向(xiàng)相反,離開零點後,軸再反向運行,當(dāng)又壓上零點開關後(hòu),PLC 產生減速信號,使數控(kòng)準備接收第一個零點脈衝(chōng),以(yǐ)確定參考考點。
(2)軸快速按預定方同運動,壓上零點開關後,反向減速運動,當又脫離零點開關後,數控係統接收到第一個零點脈衝確定參考點,在這種方式下(xià)停機(jī)時(shí),軸(zhóu)恰好壓在零點開關上,當自動回參考點時,軸運(yùn)動方向與上述的預定方向相反,離開零點開關後,PLC 產生減速信號,使數控係統在接收到第一個零點脈衝時確認參考點。
采用何種方式運行,係統都是通過PLC 的程序編製和數控係統的機床參數設定來決定, 軸的運動速度也是由機床參數#1425 設定的, 數(shù)控係統(tǒng)回參考點的過程是PLC 係統與數控(kòng)係統配(pèi)合完成的,由數控係統給出回參考(kǎo)點的命令(軸和方向地址信號G100~102), 然後軸按預定的方向運動, 壓上零點開關(guān)X1009.0~X1009.3(或離開零(líng)點開(kāi)關)後PLC 向數控係(xì)統發出減速信號G196,數控係統按照預定的方向(xiàng)減速運動,由(yóu)測量係統接收零點脈衝,接收到第一個脈衝後,再找到(dào)第一個電氣柵格點(diǎn)參數#1850 電子柵格點(diǎn)偏移量,設定坐標值。所有的軸都找到參考點後(hòu),將發出參考點回零(líng)結束信(xìn)號(F094)和參(cān)考點確立信號(F120),回參考點的(de)過程結束。
3 、回不了參考點的故障原因與維修實例介紹
數控機床開機後回不(bú)了參考點的故障(zhàng)一般有以(yǐ)下幾種(zhǒng)情況,一是由零點開(kāi)關出現問題,PLC 沒有產生減速信號。二(èr)是編碼器(qì)或光柵尺的零點脈衝出現問題。三(sān)是(shì)數控係統的測量板出現問(wèn)題,沒有接收到零點(diǎn)脈衝。
3.1 南通714 立式數控銑(xǐ)床加工中心,X 軸不能回參(cān)考點
啟動數控機床X 軸返回參考點操作,按(àn)回零鍵(jiàn)時有(yǒu)減速現象,在尋找機床參考點時出現急停報警,導致(zhì)X 軸無法(fǎ)返回參考點。該數控機床配置(zhì)FANUC-0iA 係統,X 軸在返回參考點(diǎn)時產生硬限位報警,返回參考點失敗,經PLC 梯形圖診斷,Y 軸在回參考點操作時減速信號X1009.0 由(yóu)“1-0-”,少了一步減速信號再次變為(wéi)“1”的(de)過(guò)程。更換一(yī)個行程開關後故障依(yī)舊,說明減速開關正常。經檢(jiǎn)查零限位與硬(yìng)限位擋鐵塊, 發(fā)現數控(kòng)機床Z軸的(de)零限位和硬(yìng)限位擋塊距離太近,懷疑X 軸(zhóu)限位擋(dǎng)塊的位置是因(yīn)為工時的振動或(huò)撞擊使兩者之間位置發生改變(biàn)。當數控機床回參考點減速後就碰到硬限位擋鐵造成超程報警。
打開數控機床X 軸外護罩, 找到X 軸限位擋塊卸下來,調整硬限位擋塊與零限(xiàn)位擋塊之間的距離即可。應先安裝零(líng)限位(wèi)擋塊,再安裝硬限位擋塊(kuài)。擋塊安裝時,應先用手輪上下移動來確定是否和行程開關的觸點相對應, 安裝完後應在低(dī)速擋位回(huí)參考點確(què)認。係統參數#1320、#1321用於調整各軸正負軟行程參數。硬限位(wèi)開關、零點開關、零點限位擋鐵和硬限位擋鐵位置見圖1。
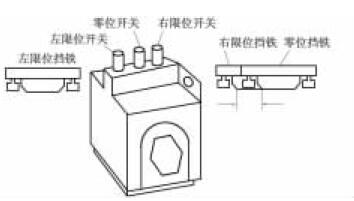
圖1 開關、擋(dǎng)鐵、限位位置圖
3.2 南通(tōng)600立式數控銑床加工中心(xīn)Y 軸不(bú)能返回參考點
數控機床Y軸返回參考點時, 坐標值過(guò)零(líng)後(hòu)產生軟限位(wèi)報警。參數#1300第(dì)6位設定“0”時(shí),機(jī)床上電後執行上次存(cún)儲的行程限(xiàn)位,所以機床在未回參考點之前軟限位有效。將參數#1320的Y軸正向軟限位(wèi)參數增大後,返回參考點產生超程報警。經l/O狀態表診(zhěn)斷,Y 軸減速信號X1009.1 在(zài)返回參考點操作(zuò)時能由“1-0-1”跳(tiào)變,說(shuō)明減速開關正常。懷疑(yí)Y軸減速信號在經過“1-0-1”跳變,剛好(hǎo)錯過了編碼(mǎ)器(qì)發出的一(yī)轉零脈衝信號,在尋找第2個脈衝信號時碰到硬限位開關造成超程報警。檢查參數#1850電子柵格點偏移量(liàng),Y軸柵格偏移量為零, 將此參數Y軸的柵格偏移量由零改為4.5 mm後開機運行,Y軸返回參(cān)考點正常。
3.3 係(xì)統經(jīng)常發生(shēng)死機現象無法自動返回參考點(diǎn)
南通立式數控銑床加工中心,因經常發現係統死(sǐ)機現象,將機床係統重裝後。發現此機床(chuáng)各軸(zhóu)手動返回參考點時,點軸選通按鍵後無法自動返回參考點, 此前點軸選通按鍵後可以自動返回參考點。在REF 方式(shì)下按回參考點鍵(按“X+”、“Y+”、“Z+”鍵)坐標軸不能連續運動回參考點,後發現必須一直按著軸選通鍵才能返回參考(kǎo)點。
用FANUC 的狀態表去查各個地址的狀態,根據這些地址,在PLC 梯形圖中查找控製返回參考點的梯(tī)形圖,在圖(tú)中找(zhǎo)出是哪些結點完成回參考點(diǎn)連續(xù)操作的,以(yǐ)便並判斷故障產生原因。用FANUC 的狀態表查X 坐標軸的地址是X30.4(方向移動),通過此地址在PMC 梯形圖中查到是接通G100.0 線圈(回參考點的軸(zhóu)和方向地址), 查看哪些結點是完成G100.0 接通後保(bǎo)持的,發現當按下“X+”坐標軸鍵,梯形圖中X30.4 閉1 合,G100.0線圈接通,鬆開X 坐標軸鍵,觸點X30.4 斷開(kāi),G100.0 線圈也斷(duàn)開。說明(míng)這個點動控(kòng)製回路不能自鎖,不能自鎖的原因是k1.1 是斷開的。
查看k 地址參數表中發現k1.1 為“0”狀態,可能是因為在傳輸過程中造成(chéng)參數丟(diū)失。將k1.1改(gǎi)為“1”狀態,k1.1 接通。再按各軸(zhóu)選通鍵,實現機床自動回零。
4 結論
首先知(zhī)道數控機床返回參考點工作方式和動作過程, 根據出現的故障現象判斷哪個環節出現了問題, 將重點(diǎn)放在檢查返回參考點的(de)行(háng)程開關、檢測元件編碼器以及接口(kǒu)電路的工作狀態上。掌握了解FANUC 的狀態表、PMC 梯形圖,學會觀察NC、PMC 及I/O 接口電路的狀(zhuàng)態指示信號(hào)。對機床返回參考點的工作原理應有更進一步的掌握, 以便在工作過程(chéng)中快速分析判斷故障,直至排除故障。
如果您有機床行業、企業相關新聞稿(gǎo)件發表,或進行資訊合(hé)作,歡迎聯係(xì)本網編輯部(bù), 郵箱:skjcsc@vip.sina.com


- 2024年11月 金屬切削機床(chuáng)產量(liàng)數據
- 2024年(nián)11月 分地區金(jīn)屬切削機(jī)床產量數據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基(jī)本型乘用車(轎車)產量數據(jù)
- 2024年11月 新能源汽車產量(liàng)數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新(xīn)能源汽車產量數據
- 2024年10月 軸(zhóu)承出口(kǒu)情況
- 2024年(nián)10月 分地區(qū)金屬切(qiē)削機床產量數據(jù)
- 2024年10月 金屬切削機(jī)床產量(liàng)數據
- 2024年9月(yuè) 新能源汽車銷量情況(kuàng)
- 2024年8月 新能源汽車產(chǎn)量數據
- 2028年8月 基本型乘用車(轎車)產(chǎn)量數據
- 機械加工過程圖示
- 判斷一台加工(gōng)中心精度的幾種辦(bàn)法
- 中走絲線切割機(jī)床的發展趨勢
- 國產數控係統(tǒng)和數控機床何去何從?
- 中國的技術工人都去哪(nǎ)裏了?
- 機械老板做了十多(duō)年,為何還是小作坊?
- 機械行業最新自殺性營(yíng)銷(xiāo),害人害己!不倒閉才
- 製造業大逃亡
- 智能時代,少談點智造,多談點製造
- 現實麵前,國人沉默。製造(zào)業的騰飛,要從機(jī)床
- 一(yī)文搞懂數控車床(chuáng)加工刀具補償功能
- 車床鑽孔(kǒng)攻(gōng)螺紋加工(gōng)方(fāng)法及工(gōng)裝設計
- 傳統鑽削與螺旋銑孔加工工藝的區別