")



摘 要:以VMC3016L加(jiā)工中心(FANUC 0I-MATE-MD係統)為背景(jǐng),介紹VMC3016L加工中心急停與過行程(chéng)硬件控(kòng)製電路設計,對過行程與急停報警控製、CNC進入急停(tíng)時G8.4信號的控製、軸互鎖控製、Z軸互鎖控製、進給暫(zàn)停控製的PMC梯形圖(tú)設計等方麵做了詳細的分析和解釋,以此作為工(gōng)程(chéng)技術人員設計加工中心的急停與安全保護功能的理論支撐。
關鍵詞:VMC3016L加工中心;急停;過(guò)行程;安全保護功能;PMC梯形圖
0 引言
在數控機床(chuáng)使用(yòng)過程中,會遇到一些突發情(qíng)況,例如機械運動部分超過運動極(jí)限位置時、工人看到主軸刀具與夾具快要撞到時,此時機床可以立刻進入緊(jǐn)急急停狀態,切斷所有進給電機(jī)和主電機的動力電以保護機床[1];當機床正(zhèng)在自動加工時,如果防護門被打開了,所有的進給軸應該立即鎖住,停止移動,以免出現人身傷害事故;正(zhèng)常加(jiā)工時,如(rú)果刀庫不在最(zuì)左(zuǒ)麵,嚴禁Z軸移(yí)動,否則會將刀(dāo)庫或(huò)主軸撞壞。因此數控(kòng)機(jī)床的急停與安(ān)全保護功能的設計至關重要,本文詳細介紹VMC3016L加工中心(xīn)急停(tíng)與過行程硬件控製電路設計;行程與急停報警控製、CNC進入急停時G8.4信號(hào)的(de)控製、軸互鎖控製、Z軸互鎖控製、進給暫停控製(zhì)的PMC梯形(xíng)圖設計。
1 、急停硬件電路設計
如圖1所示,限位控(kòng)製是數控機床(chuáng)的(de)一個基本安(ān)全功能,由於絲杆的行程(chéng)有限,數控車床各軸運行是有安全(quán)運行區域的,一旦出了(le)此安全區域(yù),工作(zuò)台運動到極限位置,導致“撞(zhuàng)車”事故(gù),將絲杆螺母(mǔ)或工(gōng)作台撞(zhuàng)壞[2],
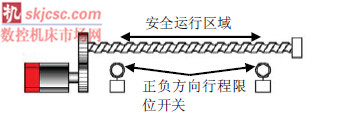
圖1 軸正負方向行程限位示意圖
為了限製各(gè)軸在安全區(qū)域內運行,在工作台上安裝了兩個(gè)行程限位開關,以限定軸移動的正負方向行(háng)程。

圖(tú)2 急停(tíng)按(àn)鈕
如圖2所(suǒ)示,為急停按(àn)鈕,當數控機床操作人員或維修人員認為(wéi)機床發生緊急情況時(shí),為了保護機床或人身(shēn)安全,迅速拍下此急停控製按鈕,此時數控機床上的電源放大模塊與伺服模塊的(de)輸入電(diàn)壓瞬時切斷,各部分的電機就無法動作,機床的所有運動部(bù)件被鎖住,機床各移動軸停止移動。一(yī)旦危險或故障排除後(hòu),順時針旋(xuán)轉急停按鈕,使其複位,機床進入準備(bèi)運行狀態。
如圖3急停超程硬件電路原理圖所示, X、Y、Z三個軸(zhóu)正負方向的(de)行程(chéng)限位開關信號(SQX+、SQX-、SQY+、SQY-、SQZ+、SQZ)常閉觸點互相串聯,控製超程繼(jì)電器KA2,為數控(kòng)係統提供硬限位超程信號,在屏幕上出現相應的(de)報警信息,以警示操作者。當(dāng)任一坐標軸超程產生超(chāo)程(chéng)和急停報警之後,需要按住(zhù)超程釋放按鈕讓超程繼電器KA2與急(jí)停繼電器(qì)KA1得(dé)電,急停報警消除(chú),然後移動(dòng)軸,使其往超程的反方向移動,當行程限位擋塊離開(kāi)行(háng)程開關(guān)後就可以鬆(sōng)掉(diào)超程釋放按鈕。六個行程限位開關信號再與(yǔ)急(jí)停按鈕的常閉觸點信(xìn)號串聯,控製急停繼電器KA1。電源模塊PSM(PowerSupply Module)的CX4端子接(jiē)急停繼電(diàn)器KA1信號的常開觸點[3],作為電源模塊PSM的(de)急停輸入信號(hào),作為電源模塊工作與否的一個(gè)條件。在FANUC 0I數控係統中,I/O LINK子單元以開關量I/O單元(yuán)為主,處理一些輸入輸出(chū)開關量(liàng)信號,這裏將急停繼電器的一個信號KA1常開觸(chù)點接到CB105接口上的A08腳,信號地址為X8.4,這個信號必須接到CB105接口上(shàng)的A08腳,因為(wéi)急停信號的輸入地址X8.4是FANUC係(xì)統自定義的,不充許(xǔ)用戶修改(gǎi)[5],由數控係統CNC直接讀取這個(gè)急停信號(hào)X8.4,當此信號為0時,數控係統立即(jí)進入急(jí)停(tíng)狀態。將超程繼電器的信號KA2常開觸點接到CB105接口上的(de)B08腳,信(xìn)號地(dì)址為X8.5,供係統過行程報警用。
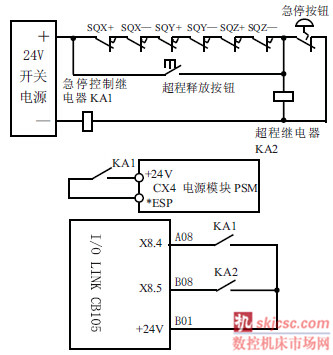
圖3 急停超(chāo)程硬件電路原理(lǐ)圖(tú)
正常情況下(沒有急停狀況或超程),此時KA1與KA2繼電器得電(diàn)吸合,電源模塊PSM的(de)CX4接頭(tóu)得到KA1閉合信號,進(jìn)入正常工作(zuò)狀態,為後麵的伺服驅動(dòng)器提供(gòng)直流母線電壓(yā)300V,I/O LINK上CB105接口上的(de)X8.4信號得到24V,狀態變為1,無係(xì)統急停報警;同樣,X8.5信號狀態也(yě)為1,無超程報警,機床此時進入正常(cháng)運行狀態。
2 、急停安全保護功能PMC程序設計與(yǔ)分析
2.1 過行程與急停報警控製
當X、Y或Z三坐標方向過行程,超程繼電器KA2失電,KA2常開觸(chù)點斷開,X8.5不能得(dé)到24V,使得X8.5=0,如圖4所示,此時輸出A0.0=1,數控係統屏幕上顯示EX1000 OVER TRAVEL(過行(háng)程報(bào)警)(對應信息顯示位:A0.0)。當工(gōng)作台移出超程區域,超程繼電器(qì)KA2得電,使得X8.5=1,此時輸出A0.0=0,無超程報警。
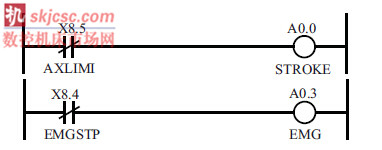
圖(tú)4 過行程與急停報警控製梯形圖
當拍下急停按鈕時,急停控製繼電器KA1失電,其常開觸(chù)點斷開,X8.4不能得到(dào)24V,使得X8.4=0,如圖4所示,此時輸出A0.3=1,數控係統屏幕上顯示EX1003EMERGENCY STOP (急停報警EMG,如(rú)圖5所示)(對應信息顯示位:A0.3)[4]。

圖5 FANUC係統急停報警(jǐng)畫麵
2.2 CNC進入急(jí)停G8.4信號的(de)控製
FANUC 0I係統的PMC→CNC信號(G信號)、CNC→PMC信號(F信號)由CNC係統軟件定義其地址的,是固定的,用戶隻可(kě)使用不可更改[5]。G8.4是PMC向CNC發出的急停輸出信號,一(yī)旦G8.4=0,CNC立刻進入(rù)急(jí)停狀態。控製要求:過行程、急停、主軸異常、氣源壓力低、冷(lěng)卻泵電機過載時,使G8.4=0。如圖6所示,當過行程報警A0.0=1,或主軸異常報警A0.l=1,或氣源壓力低報警A0.2=1,或急停(tíng)報警A0.3=1,或主軸冷卻泵電機過載報警Al.4=1時(shí),輸出R515.7=1(報警寄存器,控製急停)。
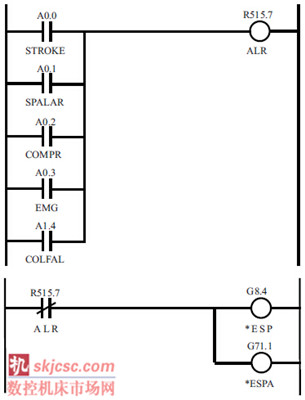
圖6 G8.4信(xìn)號的控(kòng)製(zhì)梯形圖
五(wǔ)個報警信號A0.0、A0.l、A0.2、A0.3、A1.4采取並(bìng)聯輸入,它們都使用常開觸點。即當其中任何一個(gè)報警信號輸入為1時,R515.7輸出1,使得G8.4變為0,(在(zài)圖中可看到G8.4的標誌是*ESP,FANUC數控係統規定:帶*號的標誌為零時該信號有效)[5],此時(shí)係統進入急停;G71.1是第一串行主軸急停信號*ESPA,因為本機床采(cǎi)用的是FANUC串行主軸,串行主軸正常工作的前提條件是G71.1為1,為0時處(chù)於急(jí)停狀(zhuàng)態,串行主軸(zhóu)伺服驅動器禁止輸出,此(cǐ)時主軸停轉(zhuǎn),也就是當出(chū)現過行程、外部急停、主軸異常、氣源壓力低、冷卻泵
電機過載時,使G71.1=0,串行(háng)主軸進入急停狀態,主軸立刻停轉。
2.3 軸互鎖控(kòng)製
當進(jìn)入急停狀態或過行程或機床門打開時,使機床各軸(zhóu)鎖住(zhù),禁止(zhǐ)其移動,以保護機床(chuáng)。控製(zhì)梯形圖如(rú)圖7所示,G8.0(*IT)是所有軸互鎖信號(為0時各(gè)軸伺服關斷)、G130.0(*IT1)是X軸互鎖信號(為0時X軸伺服關斷)、G130.1(*IT2)是Y軸互鎖信號(為(wéi)0時Y軸伺服關斷)、G7.5(*FLWU)是伺服關斷、急停或伺服報警期間的位置跟蹤信號(為(wéi)0時支(zhī)持跟蹤)。
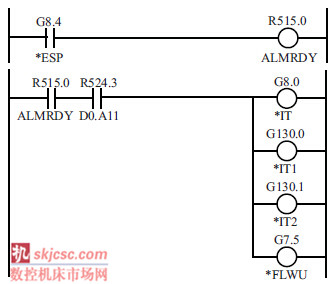
圖7 軸互鎖(suǒ)控製梯形(xíng)圖
當CNC不在急停狀態即(jí)G8 . 4=1 時, 此時輸(shū)出R515.0=1(報警解除),同時機床保護門(mén)關閉(bì)信號R524.3為1時,G8.0、G130.0、G130.1三個信號(hào)為1,伺服軸可以移動(dòng),否則G8.0、G130.0、G130.1三個(gè)信號為0,伺服軸(zhóu)關斷[6]。
2.4 Z軸(zhóu)互(hù)鎖控製
因為立式加工中心的Z軸(zhóu)比較特殊,此台(tái)加工中心是鬥笠式刀庫換刀,換刀時,刀庫要從最左麵移到最右麵(靠近主軸側,而主軸是由Z軸帶動上下(xià)移動的),刀庫在(zài)插刀和還刀(dāo)時,嚴禁Z軸移動,否則會將刀庫(kù)或主軸撞壞[7],這是一(yī)個(gè)很重(chóng)要的安全(quán)保護功能,所以這裏設計在執行M6換刀指令時、或是刀庫在最右側時,Z軸要鎖住,不能移動,如圖8中Z軸(zhóu)互鎖控製梯形圖所示,當執行M6換刀指令時,其標誌(zhì)位R622.0=1,梯形圖中的常閉觸點斷開,或者刀庫在最右側,其標誌位R528.5=1,梯形圖中的常閉觸點斷開,此時若有一個(gè)條件滿足,則輸出R511.5=0(Z軸鎖定標誌), G130.2(*IT3)是Z軸互鎖信號為0, Z軸伺服關斷,無法移(yí)動(dòng)。
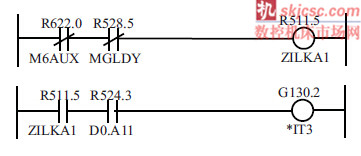
圖8 Z軸互鎖控製梯形圖(tú)
2.5 進給暫停控製
G8.5(*SP)是(shì)進(jìn)給暫停信號(為0時各軸進給運動暫停)[8],正常加工時(shí),必須使G8.5為1,以下是(shì)循環暫停控製過程,如圖9所示,循環暫停按鍵SW3,信號地址是X0.1,X0.1的信號線是(shì)接到此按鍵的(de)常(cháng)閉觸點上的(de),正常加工時,此觸點是閉合的,隻有按下循(xún)環暫停(tíng)按(àn)鍵後,此觸點才斷開,X0.1=0,使(shǐ)G8.5=0,這樣程序就停(tíng)止運行,並且沒產生A45、A23報警R518.2=1、R518.1=1,並且(qiě)準備好信號R100.1=1,M01、MOO指令沒有執行R530.3=O、R554.3=0,並且沒有產生冷卻(què)電機過載報警A2.4=0,並且在執行主軸速度S代碼時(shí)沒
產生刀具沒有抓緊報警A4.6=0時[9],輸出G8.5=1(進給不暫停(tíng))。
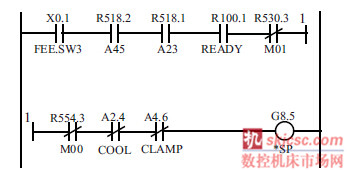
圖9 進給暫停(tíng)控製梯形圖
3、 結束語
為了為數控機床營造一個安全運行環境,更重要是數控機床自身要有各種安全保護功能,通過自身(shēn)的安全保護功能PMC程序(xù)監控外圍的一些不安全因素(sù),及時處理,以免出現嚴重的問題(tí),例如潤滑油沒有了,不能隻簡單的出現潤滑油位低報(bào)警,還要使(shǐ)程序(xù)進入暫(zàn)停狀態,這樣是為了保護進給機械結(jié)構因缺油而受損。實踐證明,采用上述急停、過行程和安全保(bǎo)護功能設計的VMC3016L的(de)加工中心安全故障極(jí)少,其他故障率也(yě)較低,更(gèng)沒有出現撞機導致損壞機床機械結構(gòu)的事故。
如(rú)果您有機床行業、企業相關新聞(wén)稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com


- 2024年11月 金屬切削機床產量數據(jù)
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸(zhóu)承出口情況
- 2024年11月 基(jī)本型乘用車(chē)(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷(xiāo)量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地(dì)區金屬切削機床產量(liàng)數據
- 2024年10月 金屬切削機(jī)床產量數(shù)據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本(běn)型乘(chéng)用車(轎車)產量數據
- 機械加工(gōng)過程圖示(shì)
- 判(pàn)斷一台(tái)加工中心精度的(de)幾種辦(bàn)法
- 中(zhōng)走絲線(xiàn)切割機(jī)床的發展趨勢
- 國產(chǎn)數(shù)控係統和數控機床何(hé)去何從?
- 中國(guó)的技術工人都去哪裏了?
- 機械老板做了十多年,為何(hé)還是小(xiǎo)作坊?
- 機械行業最新(xīn)自殺(shā)性營銷,害人害己!不倒閉才
- 製(zhì)造業大逃亡
- 智能時代,少談(tán)點智造,多談點製造
- 現實麵前,國人沉默。製造業的騰(téng)飛,要從機床
- 一文(wén)搞(gǎo)懂數控車(chē)床加工刀具補償功能
- 車床鑽孔攻螺紋(wén)加工方法及工裝設計
- 傳統鑽削與螺旋銑(xǐ)孔加工工藝的區別