


隨著(zhe)航(háng)空、航(háng)天以及汽車等製造工業的快速發展,高精度、複雜大型零(líng)件的加工與精度評價成為業內關注的突出問題,通常這類工件產品需(xū)經(jīng)過多次的(de)加工—測(cè)量—修整,才能滿足設計要求。數控機床(chuáng)作為一種高效、高精度的製造裝(zhuāng)備在製造企業(yè)中得到了廣(guǎng)泛應用,而且正朝著高精度、高效率、開放化、智能化、複(fù)合(hé)化的(de)方向(xiàng)發展。複(fù)合化的目標是盡可能地在一台(tái)機床上利用一次裝卡完成全部或大部分的加工任務,以(yǐ)保證工(gōng)件位置精度,提高生產效率(lǜ) 。加之人們(men)對工件加工的高(gāo)精度、高效(xiào)率(lǜ)的不斷追求,與(yǔ)數控機床集成的在線測量技術在實際生產中受到廣(guǎng)泛關注。
傳(chuán)統的離線測量方式,即采用拆(chāi)卸移動工件的(de)檢(jiǎn)測方式,涉及二次裝夾(jiá)定(dìng)位(wèi)問題,使得(dé)加工結(jié)果和測量結果的一致性差,導致生產周(zhōu)期延長、生產效率降低。拆卸移動工件的檢測(cè)方式是阻礙數字化製造整體效(xiào)率提高的(de)主要原因(yīn)[2]。在線測量,即加工與測量過程均在同一設備上實施的檢測方式 ,工件經過一次裝卡便可(kě)完成加工與測量工作,避(bì)免了二(èr)次裝夾定位誤差,可降低測量(liàng)成本,減少生產輔助時間,提高生產效(xiào)率和加工精度。數控(kòng)機床在線(xiàn)測量(liàng)技術具有采樣速度快、精度(dù)高的特點,實現了工件的數字(zì)化數據采集和(hé)精度評價 。
與三坐標(biāo)測量機(Coordinate Measuring Machining)相比,由於數控機床在線測量環境複雜,誤差(chà)影響因素較多,但三坐標測量機價格昂(áng)貴,性價比與應用的(de)廣泛程度遠不如數控機床 。因此在精度要求不是很高時(shí),數控機床在線測量技術更具優勢。
數控機床在線測量技術(shù)是加工(gōng)測量一體化技術的重要組成部分,可以擴展(zhǎn)數控機床的功能,有效地提高現有機床的使用價值,保證零件的加工質量 。因此,數控機床在線測量(liàng)得到現代製造企(qǐ)業的(de)重視和應用,具有重要的研究和應用價值,國內外研究人員針(zhēn)對此(cǐ)方麵(miàn)進行了(le)大量的研究工作,並在實際中進行(háng)了推廣和應用 。
機床在(zài)線測量(liàng)組(zǔ)成結構
現代數控機床較之以前在開放性(xìng)方麵有了很大的提升,現代數控係統良好的擴展性和兼容性使(shǐ)得一台數控機床兼具一定精度的三維坐(zuò)標測量功能(néng)成為可能 。如果把機床與測量係統有機地集成起來,在零件加工的同時,又可(kě)以實現工件的在線測量。
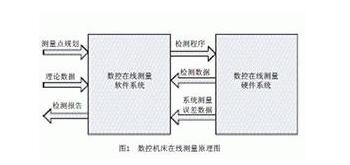
數控在線測量係統組成主要包括硬件和軟件兩部(bù)分。類(lèi)似數控加工(gōng)係統,其硬件(jiàn)係統主要包括數控機床係統和測頭係統;軟件係統則是利用二(èr)次開發技術,實現類似於數控加工編程的(de)在線(xiàn)測(cè)量編(biān)程,得到驅動數控機床實(shí)現測量的NC代碼 。數控機床在線測量係統的原理示意圖如圖1所示。
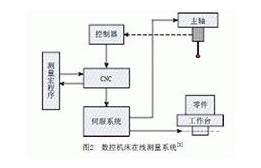
數控機床在(zài)線測量係統(如(rú)圖2所示)主要分為2種:一(yī)種為(wéi)直接(jiē)調用基本宏程序,而不用計算機輔助;另一種則根(gēn)據機床數控係統提供的數控指令,用戶開發編(biān)製應用係統隨時(shí)生成檢測程(chéng)序,然後傳輸至數控係統中 。
在工業發達國家,測頭基(jī)本上和(hé)刀具一樣已成為數控機床不可或(huò)缺的基本備件,在機械製(zhì)造(zào)領(lǐng)域中得到越來越廣泛的應用(yòng)。數控機床上采用的測(cè)頭主要分為2種:一種是以(yǐ)加(jiā)工工件為測量對象,使用時安裝在機床主軸上的(de)工件測量測頭;另一種是以刀具為測(cè)量(liàng)對象,處於機床固定位置的刀具測量測(cè)頭(tóu)。通常,機床在線測量采用是工件測量測頭,可(kě)手動測量或根據測量(宏)程序對工件進行自動測量[12]。數控在線測量係統是基於數控機床係統開(kāi)發並集(jí)成測量係(xì)統(tǒng)實現的,其測量過程和加(jiā)工過(guò)程十分相似。
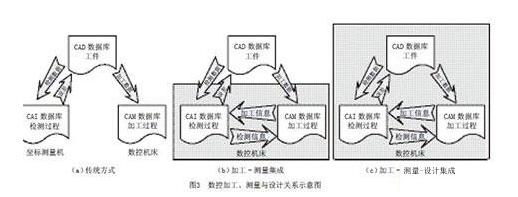
盡管數控機床在線測量(liàng)具有諸多優點,但現有(yǒu)的在線測(cè)量係統(tǒng),大都是專用的,測量功能單一,不能(néng)滿足加工零件的複雜(zá)性、多樣性需求。在機床在線測量係統基礎上(shàng),將其與CAD係統(tǒng)進行集(jí)成,經過CAD係統的二次開發,實現測量編程和仿真驗證,增大了數控機床在線測量的靈活(huó)性及工作範圍,實現了(le)設計+加工+測量(Design-Manufacturing-Inspection,簡稱D-M-I)的集成。數控加工、測(cè)量與設計三者在不同階段的集成示意(yì)圖如圖3所示。
機(jī)床在線測量過(guò)程
1 、工作原理
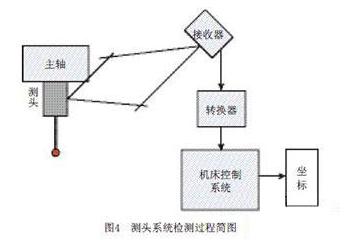
在線檢(jiǎn)測係統中直接影響精度的關鍵部件是測頭[6],具有搜索前進(jìn)的能力的觸發式測頭最為常用[7,13-14],向數控係統提供觸發信號以獲得觸發點的坐標[9,13]。測頭係統最關鍵的一(yī)個功能是可生成程序(xù)中(zhōng)斷指令,當測頭測端(duān)與被(bèi)測工件接觸時,測頭係統向數(shù)控機(jī)床發送一外部中(zhōng)斷請求(該中斷請求(qiú)由測頭觸(chù)發信(xìn)號提供(gòng))。當機床控製(zhì)係統接(jiē)收到中斷後(hòu),便通過定位係統鎖存此時測端球(qiú)心的坐標值,以此來確(què)定測端與被測工件接觸點的坐標值。測頭係統檢測過程如圖4所示。
接觸式測頭較其他測頭(tóu)擁有更高(gāo)的(de)測量精度,同時接觸式測頭由於結構簡單、使用方便(biàn)、製造成本低以及(jí)較高的觸發精度等(děng)優點,在數控機床在線檢測係統中被廣泛應用。
在線檢測運動是通過輸入到數控係統中的數控檢測程序的控製實現的。由於數控機床采用的數控係統(tǒng)不同,其控(kòng)製方法和編程代碼等有所差別(bié)。
2 、測頭定位
為使數(shù)控機床能夠準確、高效(xiào)、快速地(dì)完成每一次的在線測量,在一(yī)次測量任務中需多次測量觸發。根據測頭在一次測量過程中運動(dòng),需設定(dìng)3種(zhǒng)距離 ,如圖5所示。
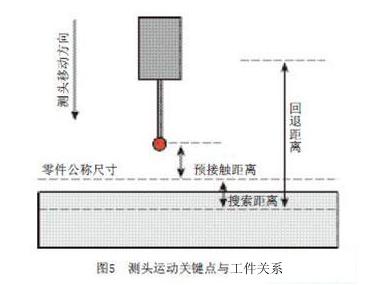
(1) 預接觸距離。該距離是指測(cè)頭中心到被測工件表麵公稱尺寸上接觸點的距離。在測頭進入預接觸距離前,測頭快速運動。
(2) 搜索距離。該距離設定了測頭從零(líng)件的公稱尺寸開(kāi)始沿進入被測零件材料內部方向的最大距離。如果測頭在這段距離(lí)運動中觸發,機床將鎖定觸(chù)發點的坐標。在搜索距離階段,測頭應以給定的測量速度運動。
(3) 回(huí)退距離。該距離是測頭接觸到(dào)被(bèi)測表麵後沿反方向回退的距離。測頭接觸(chù)被測表麵後,為了避免移動過量(liàng)而折斷,測頭需要(yào)反(fǎn)方向退出一段距離,同時回退距離必(bì)須足夠大,以保證測頭能安全地到(dào)達下一個(gè)預接觸點或定位點。在回退距離階段,測頭以回退速度退回。
為滿足測頭各(gè)個運動階段的不同需求,在測量過程中對應了3種距離,包含3種速度,即定位速度、測量速度和(hé)回退速度。測量速度應取(qǔ)值較小,以減小測(cè)量值的誤差,同時避免(miǎn)折斷(duàn)測(cè)杆(gǎn)。在測量過程(chéng)中為提高測量效率,可以將定位速度和回退速度取值較大,從而保證以較快速度(dù)移動測頭,減少測(cè)量時間。
為避免測頭在碰(pèng)觸到被測表麵後仍向前運(yùn)動(dòng)而折斷測杆,機床測量會在接收到觸發信號之(zhī)後將剩餘行程刪除。剩餘行程刪除,即測頭在已編程行(háng)程運動過程中接收到觸發信號時,記下當前坐標值之後跳過(guò)未完成的動(dòng)作,繼續執(zhí)行(háng)下(xià)一行代碼。
目前,數控係統一般(bān)均(jun1)提供了基本的測量指令,或測量係統的開發(fā)單位或人員也會(huì)提供部分已(yǐ)封裝好的測量指(zhǐ)令供用戶使用。
3 、檢測(cè)路徑規劃
數控機床在(zài)線測量係統是一種通過(guò)采樣來進行測量的係統 。因此采樣(yàng)點的數(shù)量和分布情況將(jiāng)直接影響測量結果(guǒ),對自由曲麵的測量尤為重要。對整個被測表麵全部進行采樣是不現(xiàn)實的,為提高測量結果可信度,通(tōng)常會采用增加檢測點數目的方式,但獲得高準確(què)度的同時也會極大降低(dī)測量效率。因此(cǐ)如何(hé)規劃高效(xiào)、準確的檢測路徑成為關鍵所在。
機床在線測量在規劃檢測路徑時(shí),在滿足測量精度(dù)要求的基礎上盡可能提高測量效率,即在(zài)滿足測量精度的前提下,以(yǐ)最短的測量路(lù)徑檢測最(zuì)少的測量點。以圓柱麵測量為例,把測頭定位到型麵的中(zhōng)心線上,采(cǎi)用四點測量方法便可以獲得高精度的測量結果。該測量方法(fǎ)對內孔測量也同樣適用,詳細測量(liàng)路徑見(jiàn)文(wén)獻 。
在路徑規(guī)劃要求的指導下,平麵測量、凸(tū)台(tái)/凹槽(cáo)測量以及角度測量等均已(yǐ)有確定的測量路徑(jìng)規劃方案,詳見文(wén)獻 。
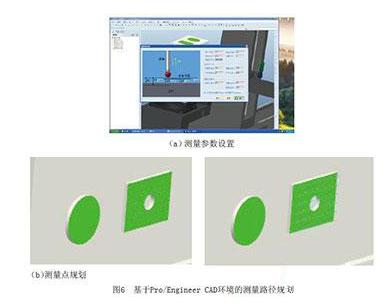
當進(jìn)行(háng)複雜測量(liàng)時(shí),則編程人(rén)員(yuán)需要對CAD係統進行二次開發,根據基本測量原理在CAD環境中進行人機交互測量(liàng)路徑規劃和編(biān)程,圖6為哈爾濱(bīn)工(gōng)業大學基於Pro/Engineer CAD環境進行二次(cì)開發進(jìn)行人機交互所規劃的測量點和測量路徑。
測量誤(wù)差分析(xī)
在任(rèn)何一項測量中,由於各種因素的(de)影響,所得到的測量值總會存在誤差。為了使測量結果更精確地逼近真實值(zhí),需要對測量結果進行補償,因此測量過程中影響測量精度的誤差組成來源應當被仔細分析和考慮。
由於數控機床在(zài)線測(cè)量係統是以(yǐ)機床為母體,集成測量係統而生成(chéng)的。所以數控機床加工過程中存在的誤差在測量過程中也同樣會影響測量精度。機床在線測量測量誤差主要包括測頭係統誤差、機床運動部件定位誤差、測量路徑不合理造成的誤差 ,其中(zhōng)測頭係統(tǒng)誤(wù)差又分為測(cè)頭靜態誤差、測頭(tóu)動態誤差以及測頭在機床上的安裝誤差等。
測頭(tóu)靜態誤差包括死(sǐ)區誤差和測頭重複(fù)定位誤差,它隨著測杆長度、剛度以及接觸壓力的改變而改變。死區(qū)誤差是指測頭在接觸工件後,測杆發生的(de)彎(wān)曲變形量 。測頭(tóu)重複定位誤差相對於死(sǐ)區誤差相對較小,因(yīn)此測頭靜態(tài)誤差主要由死區誤差決定。測頭動態誤差主要與測頭檢測時的接觸速度以及數控係統采樣間隔有關。
測頭是通過與機床(chuáng)配套的刀柄安裝機床主軸上,由於測頭軸線與主軸軸線的不完全對中,存在(zài)測頭的安(ān)裝誤差 ,在多方向測量中造成測量誤差。測頭與主軸(zhóu)的不對中安裝(zhuāng)誤(wù)差,可以(yǐ)通過測量前的測頭偏心標(biāo)定進行部分補償(cháng)。
由於數控機床零部件的製(zhì)造、裝配誤差(chà)、伺服係統的跟蹤誤差以(yǐ)及間隙、摩擦等因素,機床各(gè)工作部件在進行測量運(yùn)動時,會產生定位誤差。
除此之外,測頭的半徑誤差也是一個主要的誤差來源(yuán),在數據處理時(shí)可通過測頭半徑補償來消除 。但在實際測量中,情況較為複雜,測頭半(bàn)徑誤差將(jiāng)引入測量結果,在自(zì)由曲麵的測量(liàng)過程中(zhōng),該(gāi)項誤差更為明顯。
針對測量過程中諸多的誤差來源,高效、高精度(dù)的誤差補償算(suàn)法是(shì)亟待解決的(de)一個關鍵問(wèn)題。在實際應用中,可(kě)采(cǎi)用多次測量、誤差補(bǔ)償等減(jiǎn)小測量誤差,提高測量精度。
機床測量係(xì)統與CAD的(de)集成
數控機床在線測量作為M-I模式的典型代表,極大地(dì)縮短了生產周期。但在實際應(yīng)用中,由於並未與零件的設(shè)計模型相銜接,導致測量路徑交互規劃(huá)時存在諸多不便。此(cǐ)外,根據測量結果進(jìn)行再(zài)加工時,會造成誤差的累積。在實現D-M-I模式集成後,可針對該(gāi)項誤差進行補(bǔ)償 ,從而進一(yī)步提高測量精度。
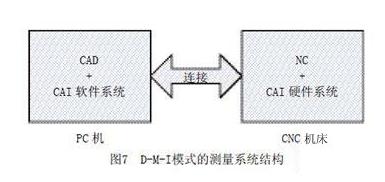
鑒於D-M-I模(mó)式相對於M-I模式的數控(kòng)機床在線測量係統具有(yǒu)更高的精度和靈活性,針對結構複雜零(líng)件的加工、測量與修整,我們采用了D-M-I模式(shì)的數控機床在線測量與(yǔ)加工,以提高測量、加工精度。將PC機與數控機床相連,在(zài)PC機上主(zhǔ)要完成(chéng)CAD係統與CAI軟件係統的集成,在數控機床上完成NC係統與CAI的硬件係統集成,從而實現CAD/NC/CAI的集成,係統結構如圖7所示。
下麵以實例針對具(jù)體測量係統的實現步驟進行介紹。根據用戶的需(xū)求,選(xuǎn)用Pro/Engineer作為D-M-I模式的數控機床(chuáng)在線測量係統的CAD係統。通過在Pro/Engineer環境中(zhōng)建立數控機床模型和工件模型來模擬實(shí)際的加工測(cè)量環境,在該環境中進行測(cè)量軌跡和(hé)加工軌跡的規劃和仿真驗證。相關功能通過Pro/Engineer的二次開發(fā)進行實現(xiàn),在Pro/Engineer中添加開發新功能(néng)菜單。
該機床在線測量係統的操作步驟為:操作者首先向虛擬數控操作環境(jìng)中加載目(mù)標零件模型(xíng);隨後進行虛擬操作環境初始化操作,其目的(de)是建立虛擬操作環境下裝(zhuāng)配坐標係(xì)與實(shí)際機床(chuáng)坐標係之間的(de)關係、各運(yùn)動部件的變換矩陣;最後,操作人員根據功(gōng)能菜單選擇進行測量麵選擇、測量路徑(jìng)規劃(huá)、測量過程仿真等操作(zuò)。當需要修改被加(jiā)工(gōng)(測量)的零件(jiàn)時,隻需將虛擬(nǐ)環境下的該(gāi)零件激活,修改完成之後將(jiāng)整個虛擬環境重新激活,便可重新對其進行操作。該係統將CAI操作軟件通過二次開發技術集成到Pro/Engineer環境(jìng)下,使得CAD係統與CAI係統實現(xiàn)無縫連接(jiē)。基於Pro/Engineer的虛擬測量環境構建,可實現實際操作過程的模擬,對測量或加工過程進行可靠性驗證。
結論
測頭係(xì)統與數控機床集成構成的機床在線測量係統,可以明顯(xiǎn)縮(suō)減生產輔助(zhù)時間(jiān),減(jiǎn)輕工人勞(láo)動(dòng)強度,提高生產效率,同時還縮減了由離線測量誤差導致的廢品率,充分(fèn)發揮了數控機床的性能。機床測量的應用可以減少中間環節,保證加工精度,提(tí)高數控機床的加工(gōng)能力;並可(kě)實現工件的數字化數(shù)據采集,後期還可借助計算機輔助設計(jì)係統可以實現工件(jiàn)表(biǎo)麵三維重構。基於D-M-I模(mó)式的機床在線測量係統,通過對CAD的二(èr)次(cì)開發,可充分利用CAD強大的圖形交互能力(lì)和(hé)設計(jì)功能,用戶進行交互測量路徑的規劃,方便係統的(de)應用。該(gāi)方向的研究及應用係統的開發具有較大的應用價值,同時也提升了數控機床的應用水平。
如果您有機床行業、企業相關新(xīn)聞稿件發表,或進行資(zī)訊合作,歡迎(yíng)聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com


- 2024年11月 金屬切削機床產量數據(jù)
- 2024年11月(yuè) 分地區金屬切(qiē)削(xuē)機(jī)床產量數據
- 2024年11月 軸承出口情(qíng)況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數(shù)據
- 2024年11月 新能源汽車銷(xiāo)量(liàng)情況
- 2024年10月 新能源汽車產量數據
- 2024年10月(yuè) 軸承出口情況
- 2024年10月 分地區金屬切削機床(chuáng)產量(liàng)數據
- 2024年10月 金屬切(qiē)削機床產量數據
- 2024年9月 新能源汽車(chē)銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘(chéng)用車(轎車)產量數據