



摘 要:以數控車(chē)床為基(jī)礎,應用關節機器人,采用PLC主從控製方式,通(tōng)過(guò)用戶變量及模塊化程(chéng)序設計方法,實現機床加工與自動上(shàng)下料高速(sù)契合,滿(mǎn)足用(yòng)戶(hù)自動化加(jiā)工(gōng)需求。
關鍵詞:自動上下料(liào) 主從控製 模塊化
Design of automatic loader system for CNC lathe based on robot
Abstract: Based on the CNC lathe, by using the joint robot and master-slave control method of PLC, through the user variables and modular program method to realize the automatic parts loading. Key words: Automatic parts loading; PLC master-slave control method; modular program method
前言
目前,機械化提速已成為我國經濟結構調整的必然趨(qū)勢。一方麵,機械化將會使許多傳統製造業,從勞動密集型行業轉變(biàn)為資本密集(jí)型行業(yè);另一方麵,國內的人力成本越來越高,由(yóu)於員工不按照勞動生產規程操作而帶來的工傷索(suǒ)賠比比皆是,因此,工業流水線上(shàng)的(de)工作逐漸被機械甚至機器人替代,產業操作工人急劇減少將是大勢所趨。
根據市場變化,為滿足客(kè)戶需求,在(zài)現有機床產品基礎上,利用關節機器人進(jìn)行物料搬運,不僅有效的提(tí)高(gāo)了工作效率(lǜ),也為用戶(hù)節約(yuē)了大量的用工成本。本款自(zì)動化(huà)加工(gōng)單(dān)元就是我公司根據客戶需要為某機械廠量身打造的一組高效自動化產品,具有很優秀的市場(chǎng)表現。
1 、方案說明:
結合當地具體情況,為該(gāi)機械(xiè)廠設計了兩整套方案,具體如下:
1.機(jī)床成“品”字形擺放(fàng),機(jī)器人固定在中心為機床上(shàng)下料,位置布局如圖1.1所示:
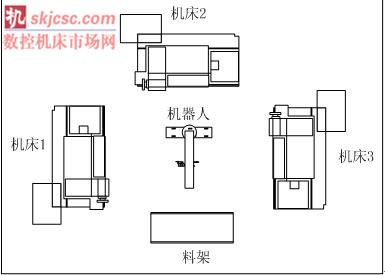
圖1.1 方案1布置圖
2.機床在傳送(sòng)帶兩邊,機器人在導軌上移動為機床上下料。位置布局如圖(tú)1.2所示:
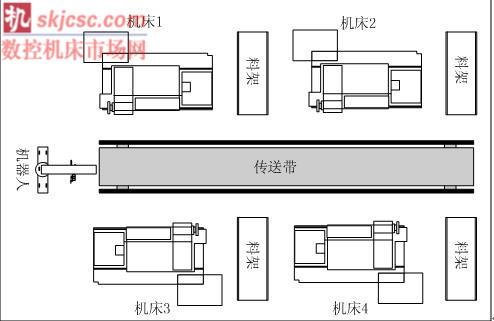
圖1.2 方案2布置圖(tú)
綜合以上兩種布局方案(àn),具體(tǐ)說明如下:
1.以上(shàng)兩種方(fāng)案均采用(yòng)主機+從機(jī)的控製結構,主機采用(yòng)PLC實現對機床和機器人的控製,而從機為數控機床PLC僅控製機床動作。
2.數(shù)控機床均采用廣州數控係統,係統本(běn)身沒有總線結構,因此兩種(zhǒng)方案均采用I/O點實現自動化單元設備(bèi)之間通訊。
3.第二種方案中的機器人需要在(zài)軌道(dào)上移(yí)動,故此對機器人本身位置的定位精度要(yào)求較高,目前實現(xiàn)起來有一定難度,而且第二種方案所需占(zhàn)地麵積相(xiàng)對較大,所以在本次課題(tí)中(zhōng)采(cǎi)用了第一種(zhǒng)方案,第二(èr)種留作(zuò)機械廠擴建(jiàn)時備用(yòng)。
綜上所述:采用外置PLC作為主機,各個機床作(zuò)為它的從機。如圖1.3所示。
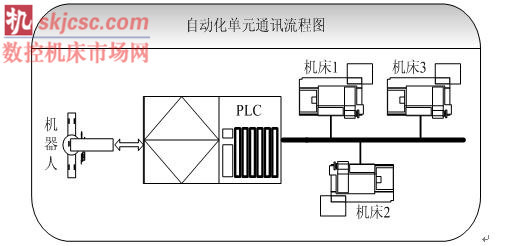
圖1.3 PLC通訊示意圖
外置PLC作為主(zhǔ)機的主要(yào)優(yōu)勢就是可以擴展它的IO接口,滿足控製需求。本(běn)課題中外(wài)置PLC主要是控製機器人的動作,以及(jí)機器(qì)人(rén)與機床銜接時的信號處理(例如:輸入信號中的防(fáng)護門開到位等;輸(shū)出信號中的機器人卡爪到位等)。各個(gè)機床(chuáng)的數控係(xì)統隻要把機床控製好,以及反饋和接收一部分(fèn)信號即可(例如:輸入(rù)信號中的機器人空閑信號等;輸出信號中的請求機器人服務信號等)。
2 硬件接口
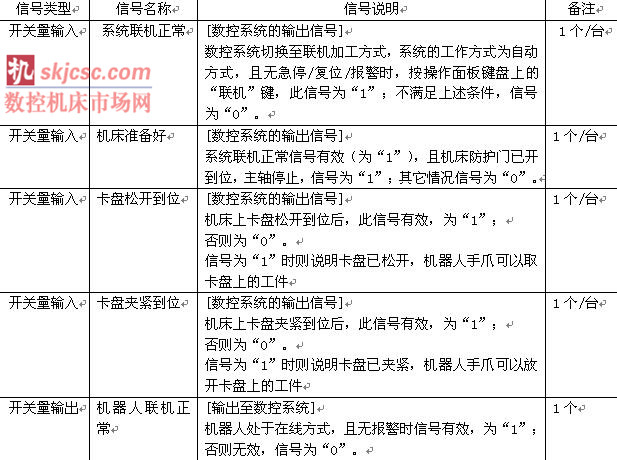
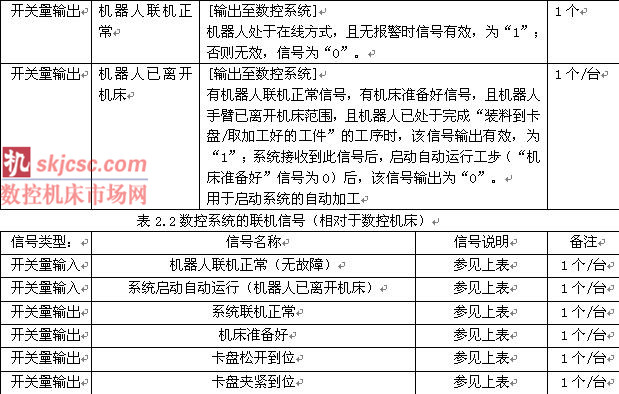
機床與機器(qì)人之間的通訊信號如表2.1和表2.2所示:
表2.1機器(qì)人的聯機信號(相對於機器人)
3 軟件流程(chéng)
本自動化加工單元具體動作流程如圖3.1所示(shì):
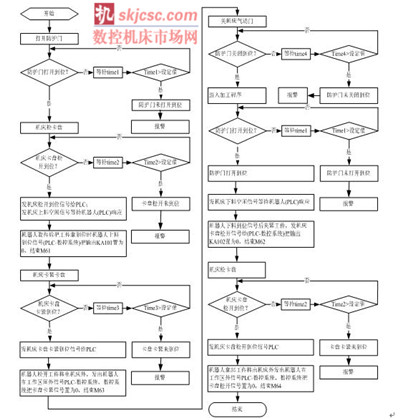
圖3.1 軟(ruǎn)件流程圖
4 軟件控製程序
4.1 機床PLC控製程序
本自(zì)動化(huà)單元在機床控製上除了編寫用於實現數控機床基本功能的PLC程序外,在PLC中分別增加編寫了機(jī)器人上料前進、機器人上(shàng)料返回、機器人下料前進、機器人下料返回、機床與機器(qì)人通(tōng)訊處理等程序塊。下麵以機器人上料PLC程序為例,簡要說明一(yī)下程序編製思路及過程。通過廣數係統K參數(shù)K16.7設置機(jī)床狀態,即機床是否處於(yú)自動化加工單元中。如果設置為“1”則機床處於聯機加工狀態(tài),機床與機器人相關的PLC程序及報警信息等均有效;設(shè)置為“0”則機床處於單機加工狀態,與機器人(rén)無關可以進行單(dān)機加工工作。機床在收(shōu)到相應信號後(如卡盤信號(hào)、防護門開信號等),在上料位置(X4.2有信號)到達後,機床(chuáng)給機器人發出允許上料動作信號(Y3.6),機器人開始進行上料動作,上料前進過程具體PLC程序如圖4.1所示:
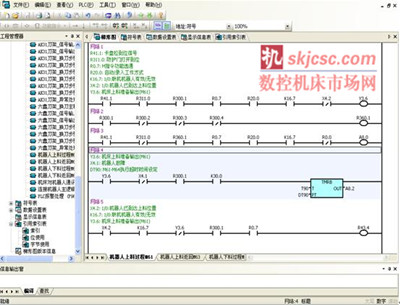
圖4.1 機器人上料過(guò)程程(chéng)序
4.2 機器(qì)人控製程序
下麵同樣以機器人上料程序為例,對機器人在上料過程中動作程序編製的思路及(jí)過程進行簡要說明。機器人上料動作過程主要通過在空間記錄的三個位置點加home點完成。上料過程中,機床準備就緒後,向(xiàng)機器人發出上料允許信號“MT1Request”,將機床卡盤鬆卡控製交給機器(qì)人,機(jī)器人收到上(shàng)料允許信號後按照預先(xiān)編(biān)好的空間位置,順序控製機床卡盤鬆卡及自身(shēn)卡爪張開與閉(bì)合,從而完成整套上料動作。上料結束後,待機器人返回到機床外部之後將(jiāng)機器人上料完成(chéng)信號“ESCMAC1”置“1”,機(jī)床(chuáng)開始零件加工運行。在(zài)這裏由(yóu)於本類型機器人沒有碼垛功能,因此(cǐ)在上料和下料過程中對多個上料(liào)和下(xià)料位置采用循(xún)環控製,這(zhè)裏不多贅述。
DEF MAC1HI( )
GLOBAL INTERRUPT DECL 3 WHEN $STOPMESS==TRUE DO IR_STOPM ( )
INTERRUPT ON 3
BAS (#INITMOV,0 )
HI1RDY=False
ESCMAC1=False
Wait for MT1Request //等待機床1發出上料信號
$BWDSTART=FALSE
PDAT_ACT=PPDAT3
FDAT_ACT=FP3
BAS(#PTP_PARAMS,30)
PTP XP3
$BWDSTART=FALSE
PDAT_ACT=PPDAT1
FDAT_ACT=FP1
BAS(#PTP_PARAMS,20)
PTP XP1
$BWDSTART=FALSE
LDAT_ACT=LCPDAT1
FDAT_ACT=FP2
BAS(#CP_PARAMS,0.2)
LIN XP2
HI1RDY=TRUE
Wait for GP1Tighten //等待機床(chuáng)1卡盤卡緊
RobGPOpen=false //機器人(rén)卡爪張開信號置“0”(機器人卡(kǎ)爪為內卡狀態)
RobGPClose=True //機器人卡爪閉合信號置“1”(機器(qì)人卡爪為(wéi)內卡狀(zhuàng)態(tài))
wait for SGPClose //等待(dài)機器人卡爪閉合(即內卡(kǎ)鬆開)到位信號
HI1RDY=False
$BWDSTART=FALSE
LDAT_ACT=LCPDAT2
FDAT_ACT=FP1
BAS(#CP_PARAMS,0.2)
LIN XP1
$BWDSTART=FALSE
PDAT_ACT=PPDAT4
FDAT_ACT=FP3
BAS(#PTP_PARAMS,30)
PTP XP3
ESCMAC1=TRUE //機器人上料完成信號
$BWDSTART=FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=FHOME
BAS(#PTP_PARAMS,50)
PTP XHOME //機器人回到home位置
END //機器人給機床1上料動作結束
5 結語
目前,本款自(zì)動化加工單元已經為用戶服務(wù),並且得到了客戶的肯定(dìng)。隨著工業自動化的發展,相信更多的自動化生產單元必將成為解決國內用(yòng)工荒及降低人力成(chéng)本的(de)簡單有效方式之一。另外數控機床(chuáng)作為工業的母機其在我國工業發展中的地位已毋庸置疑,而與數控機床相結合的自動化加工單元直接影響其工作效(xiào)率和人力成本。因(yīn)此我們有理由相信作為提高數控機床工(gōng)作效率的重要一環,自動化加工單元的開發同(tóng)樣有著廣闊的市場前景。
(文(wén)自:沈陽機床股份有(yǒu)限公司)
如果您有機床行業、企(qǐ)業相關新聞稿件發表,或進行資訊合作,歡迎(yíng)聯係本網編輯部, 郵箱:skjcsc@vip.sina.com


- 2024年(nián)11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削(xuē)機床產量數據
- 2024年11月(yuè) 軸承出口情(qíng)況(kuàng)
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能(néng)源汽車產量數據
- 2024年11月 新能(néng)源(yuán)汽車銷量情況
- 2024年10月 新能源汽車(chē)產量數據
- 2024年(nián)10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據(jù)
- 2024年10月 金(jīn)屬切削機床(chuáng)產量數據
- 2024年9月 新能源汽車銷量情(qíng)況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎(jiào)車)產量數據