
數控係統的一個發展方向, 而(ér)五軸聯動數控機床是複雜曲麵高效加工的最佳手段. 在常規CAM 係統輸出的五軸加工程序中, 複雜曲麵加工的刀具路徑是(shì)用小(xiǎo)直線和圓弧近似逼近的, 這種近似會產生兩個問題: ¹ 為了達到加工精度的要求, CAM 係統需要生(shēng)成更加密集的小直線和圓弧擬合的(de)曲線段, 同時相應表達的N C 代碼也變得更多, 而且隨著加工精度要求的提高, NC 代碼量會成倍增加. 這樣的處理方式不僅加重了CAD/ CAM 係統和CNC 係統的傳輸負(fù)擔, 同時也占用了過多的CN C 存(cún)儲空(kōng)間. 因此, 考慮(lǜ)到(dào)加工時間和加工耗費, 常規插補方式效率(lǜ)低而且不經濟. º 由於曲線是由小線段和圓弧擬合而成, 會導致曲線在節點處的速(sù)度和加速(sù)度的不連(lián)續, 這樣會導致加(jiā)工過程中的進給(gěi)率波動過大, 降低加工精度和表麵質量.
為解決以(yǐ)上問題, 國內外一些學者提出采用參數化插(chā)補的方法代替常規線性插補. 在這種參數曲線插(chā)補中, 非均勻有理B 樣條( NU RBS ) 是在參數化插補(bǔ)中得到最廣泛應(yīng)用的一(yī)種曲線表達方式. 在(zài)幾何描述上, N URBS 曲線能(néng)用比小線段和圓弧更少的數(shù)據來描述曲線, 因此能減少(shǎo)數據量, 減少CAD/ CAM 和CNC 之間(jiān)的傳輸時間; NURBS 曲線的C2 參數連續保證在插補(bǔ)過程中進給速(sù)度和加速度(dù)的(de)平滑. 正是基於NU RBS 曲線表達的這些優勢,越來越多的商(shāng)用CAD/ CAM 係統及內(nèi)核ACIS 與Paraso lid 都先後開發(fā)擴充了NURBS 功(gōng)能.
現有的高檔數控係統, 例(lì)如FA NUC、MITSUBISHI 等, 也開發(fā)出了五軸N URBS 插補功能模塊. 文(wén)獻[ 1-3] 中也提出了NURBS 插補算法. 在該算法中, CAM 係統(tǒng)及後處理程(chéng)序完成刀位點的坐標變換和五軸進給命令輸出; 其NU RBS 功能是CAM 係統直接輸出在機床坐標係下由兩條多項式曲線定義各軸(zhóu)移動(dòng)指(zhǐ)令, 其中: 一條三維的參數曲線定義3 個平動(dòng)軸x、y、z的運動; 一條二(èr)維的參數曲線定義轉(zhuǎn)動軸A 、B、C 的運動, 2 條參數曲線采用相同的控製節(jiē)點序列. 然而這種方法輸入的(de)僅僅是機床坐標係下的移動指令, 限製(zhì)了(le)插補模塊(kuài)的功能, 加工的誤差和速度控製缺乏一定的擴展性. 問題主要表現(xiàn)在:
( 1) 五軸加工需要(yào)進行坐標轉(zhuǎn)換, 而在坐標轉(zhuǎn)換的過程中(zhōng)會存在較大的非線性誤差, 而非線性誤差的控製是五軸高(gāo)速高精度加工的關鍵問題[ 4, 5] . ( 2) 該方法移動指令所(suǒ)表示的是刀位信息, 無法得(dé)到準確(què)的刀尖點的信息, 因此, 該插補方式無(wú)法控製刀尖點的速度恒定, 降低加工精度.
為解決以上2 個問題, 本文提出一種新的五(wǔ)軸雙NURBS 曲線插補格式, 並提出針對該數據格(gé)式(shì)保持恒定進給速度的插補算法, 從理論上極大地減小了非線性誤差. 在本方法中, CAM 係統把一段理想刀位點擬合成曲線(xiàn), 刀位點和刀具軸線矢量都是在工件坐標係下描(miáo)述的. NC 單元讀入曲線信息進行直接NURBS 曲線插補(bǔ), 生成密化數據點(diǎn)序列, 最後進行坐標轉換, 生成伺服係統需要的移動指令, 實現數控加工. 在該方法(fǎ)中, CNC 輸(shū)入的是工件幾何模型的刀(dāo)具路徑信息, 有更豐富的幾何信息便(biàn)於CNC的插補模塊速度和控製誤差性能提高. NC 單元在坐標轉換(huàn)前進行插補(bǔ), 進一步細分(fèn)離散點序列, 從理論上減小了在坐標轉換過程中(zhōng)的非線性(xìng)誤差[ 6] .
1 CAM 和CNC 間的雙NURBS 數據描述
1. 1 NURBS 曲線的表達和參(cān)數連續性
一條k 次NURBS 曲線可以(yǐ)表示為(wéi)一分段有理(lǐ)

NURBS 曲(qǔ)線的參數連續性由定義域內的重複節(jiē)點決定; 在定義域內, 節(jiē)點(diǎn)具有最高重複度為r k 次B 樣(yàng)條基函數為( k- r ) 次可微的, 也就是Ck- r連續. 這導致所定義的k 次B 樣條曲線也是Ck- r 連續(xù)的. NU RBS 曲線可微性的完整表述為: k 次NU RBS 曲線在其定義域內的非零節點區間內部或在每一曲線段內部是無限次可(kě)微的; 在(zài)定義域內重複度為r 的節點(diǎn)處則是(shì)( k- r ) 次可微(wēi)的. 由此可知, NU RBS 曲線在參數連續性基礎上解(jiě)決了線性插(chā)補中的段與段的連接問題. 在通常采用的NURBS 插補中, 多(duō)采(cǎi)用(yòng)3 次NU RBS 曲線, 以(yǐ)實現(xiàn)在一階節點重複度(dù)下能實現C2 連續.
1. 2 CAM輸出數據(jù)格式描述
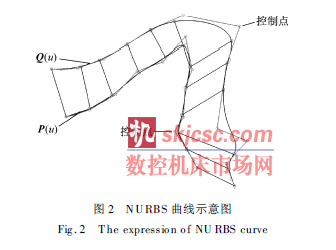
刀具移動由在工件坐標係下的兩條NU RBS 參數(shù)曲線P( u) 和Q( u) 確定:
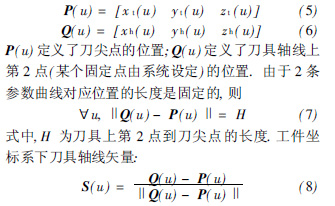
由此五軸NURBS 插補需要的刀尖(jiān)點位置和刀具軸線矢(shǐ)量可由式( 5) 和( 8) 得到(dào), NURBS 插(chā)補的全部信息可由P( u) 和Q( u) 表達, 因此可以提出適合NURBS 插補的數據格式為:
G642
BSPLINE SD= 3
xt_ yt_ zt_ x h_ yh_ zh_ pl_w _
…
xt_ yt_ zt_ x h_ yh_ zh_ pl_w _
G1
其中: G642 BSPLINE 表示NU RBS 插補模式啟(qǐ)動; SD 為NU RBS 曲線次數; x t_ yt_ zt_ xh_ y h_ zh_為式( 5)、( 6) 中所表示的曲線的控製點; pl 為該段節點矢量的變(biàn)化值; w 為權值(zhí). 現有的CAM 軟件中, Cat ia 支持輸出這(zhè)種表達刀具路(lù)徑(jìng)的數據格式. 2 實時五軸NURBS 插補過程根據前麵的分析, 本係統采用(yòng)五軸雙NURBS曲線(xiàn)插(chā)補, 在CNC 係(xì)統中需要完成實時插補和運(yùn)動學坐標轉換2 個過程.
2. 1 恒定速(sù)度插補方法
由數(shù)據格式信息可知, 實時插補的已知條件為: P( u) , Q( u) , 節點矢量U= [ u0 u1 , un+ k+ 1 ] ,進(jìn)給速度vF 和插補周期T.
由於刀尖點相對於工件的速度對加工質量的(de)影響很大, 故需(xū)要保持刀尖點速度的穩定和平滑(huá). 對(duì)P( u) 進行插補以實現(xiàn)恒定的刀尖點速度:
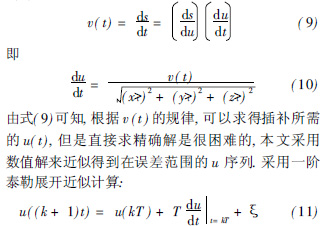
式中(zhōng), N為高階無窮小量.在該插補算法中, v ( t ) 即(jí)為加工(gōng)程序給定的(de)進給速度vF , 除起始點(diǎn)和(hé)終(zhōng)點的加減速(sù)階段外, 該進給速度在曲線上是恒定不(bú)變的.
實現NU RBS 插補的基本(běn)流程如圖1 所示.由插補計算流(liú)程可(kě)以得(dé)到u( t) 在每個插補周期節點上的參(cān)數值u( ( k+
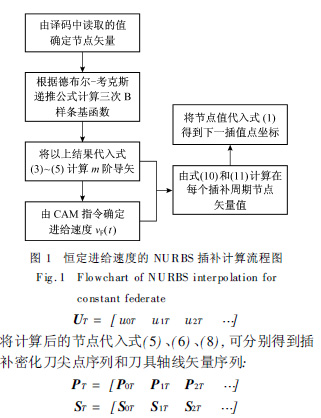
1) T ) , 得到插補後的節點在角度處理(lǐ)方麵, 由於(yú)PT 和ST 采用相同的(de)參數描述, 且都(dōu)由NURBS 曲線插(chā)補(bǔ)生成, 能夠(gòu)保證(zhèng)C2 連續. 因此, 在五軸加(jiā)工中, 能夠保(bǎo)證2 個轉動軸的角速度和角加速度的連續(xù)性, 從而實現機床各軸速度和加速度的平滑變化.
2. 2 運動學上的坐標變換
由於以上(shàng)的插補計(jì)算是在工件坐標(biāo)係下進行的, 故需要進行(háng)坐標變換, 將P 和S 轉換成在機床坐標係下的平動軸x、y、z和轉(zhuǎn)動軸A 、B 、C. 根據文獻[ 5] 中五坐標機床的運動求解: 對於(yú)每一個插補周期, 由刀具路徑( x t , y t , z t , Sx , S y , Sz ) 到機床移動指令( x m , y m , z m, Am , Bm ) . 其(qí)中: x t , y t , z t 為刀尖點坐標在x 、y、z 上的分量; Sx , Sy , Sz 為刀軸矢量在x 、y、z 上的分量; Am , Bm 為對應A 和C 的旋轉軸, 本試驗機床為A、C 軸雙轉台機床, 轉(zhuǎn)動台旋轉(zhuǎn)中心在機床坐標係(xì)中的坐標為( mx , my , mz ) . 計算可得機床移動指令為:
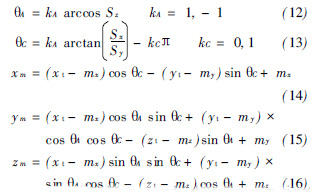
式中: HA 和HC 可能存在(zài)2 個(gè)解, 其具體象限應按(àn)運動的連續性確定, HA 取(qǔ)值需要滿(mǎn)足行程範圍.該插補方式加入了CAM 中後處理坐標轉換的環節和NURBS 格式數據讀入和預處理環節, 要進行複雜的數(shù)學計算, 因(yīn)此, 在一定的插補時間(jiān)完成這些工作是該算法的難點(diǎn).
3 仿真試驗和非線性誤差比較
3. 1 仿真試驗數據
圖2 所示為待加工的(de)N URBS 曲線.
由CAM 生成5 軸雙NU RBS 曲(qǔ)線格式代碼為:
G642
BSPLINE SD= 3
xt0. 00000 y t0. 00000 zt- 4. 00000 x h- 7. 14046
yh6. 69709 zh- 1. 95970 pl0. 000 w 1. 000 VF 1000
…
xt21. 00000 yt0. 00000 zt0. 00000 x h29. 76081
yh- 3. 92682 zh- 1. 87237 pl0. 000 w 1. 000
G1
共14 段.
由Cat ia 生成的線性插補格式(shì)代碼為:
N0010 G40 G17 G94 G90 G70
N0020 G91 G28 z 0. 0
N0040 G1 G90 x 0. 0 y0. 0 z - 4. 0 A0. 0 B0. 0
VF 250
N0050 x 0. 8488 y 0. 1356 z - 3. 5033
….
N0510 x 21. 0 y 0. 4 z - 4. 0
N0520 M02
共50 段由以上(shàng)NC 代(dài)代碼可得, 雙NURBS 曲線數據格式與線(xiàn)性插補格式數據相比, 能(néng)用更少的數據表達(dá)更豐富的幾何信息, NC 文件能(néng)大(dà)幅度減(jiǎn)小(xiǎo), CNC 模塊能一次讀取更多的幾何信息(xī).
3. 2 非線性誤差比較(jiào)
該試驗(yàn)參考Erdos 等[ 6] 所做的試驗報告中的誤差猜測量和分析方法, 利用(yòng)CAD 軟件建(jiàn)立加工模型, 生成兩種格式(shì)下的NC 代碼(mǎ)文件( 如(rú)3. 1 節所示) , 分別進行相應的插補(bǔ)得到(dào)一係列插(chā)補點, 然後對兩組插補點進行非線性誤差分析.
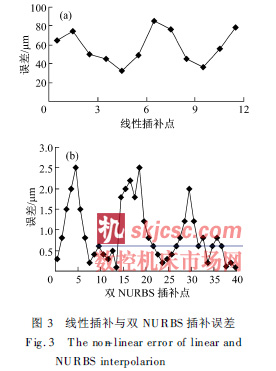
( 1) 對常規線(xiàn)性插補中的生成(chéng)的插補點取(qǔ)樣,進行非線(xiàn)性誤差分析, 由圖3( a) 可見, 該(gāi)插補方式下(xià)非(fēi)線性誤差較大, 最大誤差可達80 Lm.
( 2) 采用雙NURBS 曲線插補生成插補點, 插補周期2 ms, 進給速度1 m/ min, 在插補周期內平均的線性長度為1. 6 Lm. 取樣其中的插補點進行非線性誤差分析, 如(rú)圖3( b) 所示. 由(yóu)圖(tú)可見, 非線性誤差在2. 5 Lm 內, 通過插補充分(fèn)細分程序段後, 最大非線性誤差僅為線性插補的3. 125% , 說(shuō)明該插補方式能夠在理論上極大地減小五軸加(jiā)工的非線性誤差.
4 結 語
針對(duì)工件坐標係下的刀位點的(de)直接(jiē)插補對提高五軸聯動加工的精度具有重要意義. 雙NURBS 插補技術是發展高速、高(gāo)精度五軸(zhóu)聯動CNC 的(de)關鍵技術, 而(ér)且NURBS 格式規範的幾何數據描述也為CAD/ CAM 和CN C 的集成提(tí)供了可能.
如果您有機床行業、企業相關新聞稿件發表(biǎo),或進行(háng)資訊合作(zuò),歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com








