
何為數(shù)控機床位置(zhì)精(jīng)度,就是指一台機床(chuáng)的刀尖(jiān)所能夠達到控製係統程(chéng)序(xù)設(shè)定的目標位置的能力,也(yě)是用戶最為(wéi)關注的技術指標及所能夠滿足加(jiā)工精度的需求。
1. 激光(guāng)幹涉儀測量原理
激光器發射單一頻率光束射入線性幹涉(shè)鏡,然後分成兩道光束,一(yī)道光束( 參考(kǎo)光束) 射向連接分光鏡的反射鏡,而第二道透射光束( 測量光束)則通過分光鏡(jìng)射入第二個反射鏡(jìng),這兩道光束再反射回到分光鏡(jìng),重新(xīn)匯聚之後返回激光器,其中會有一個探測器監控兩道光束之間的幹(gàn)涉( 見圖1) 。
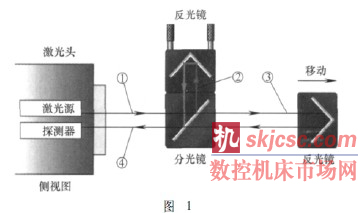
若光(guāng)程差沒有(yǒu)變化時(shí),探(tàn)測器會在相長性和相(xiàng)消(xiāo)性幹涉的兩極之間找到(dào)穩(wěn)定的信號。若(ruò)光程差有變化時,探(tàn)測器會在每一次光程變化時,在相長性和相消性幹涉的兩極之間找到變化信號,這些(xiē)變化會被計算並用來測量(liàng)兩個光程之間(jiān)的差異變化。
2. 激光幹涉儀的用途
激光幹(gàn)涉儀是一種以波(bō)長作(zuò)為(wéi)標(biāo)準對被測長(zhǎng)度進行測量的儀器(qì)。激光幹涉儀是20 世(shì)紀60 年代末期問世的一種新型的測量設備,由美國HP 公司研製成功並於1970 年投入市(shì)場,隨即受到了相關行業特別是機床製造業(yè)的重視,其主(zhǔ)要(yào)在: 線(xiàn)形、角(jiǎo)度、垂直度、直線度、平麵度等方麵上應用。隨著激光幹涉儀測量技術的不斷提高,測量軟件的不斷開發其測量(liàng)範圍越來越廣泛,特別是在測量數控機床位置精度方麵用途(tú)最為廣泛。
3. 激光幹涉儀(yí)測量數控機床(chuáng)位置精度
( 1) 測(cè)量環境激光幹涉儀檢測數控機床位置精度的最為理想測量環(huán)境是在20℃ ± 2℃ 條件下進行。由於測量數控機床位(wèi)置精度過程中工作現場很難控製在標準恒溫條(tiáo)件下進行,因此必須(xū)充(chōng)分考慮測量(liàng)環境的變(biàn)化所(suǒ)引起的測量誤差。好在激光幹(gàn)涉儀本身具備自(zì)動補償功能,它可根據測量環境的空(kōng)氣溫度、相對濕度、空氣壓力和3 個材料溫度傳感器的變化情況對激光光束波長進行(háng)自(zì)動修正補償。但是在激光測量采集數(shù)據過程中避免突發冷熱氣流的(de)產生,特別指出的是數控機床的傳動係統(tǒng)滾珠絲杠(gàng)和光柵(shān)尺等所(suǒ)產生(shēng)的綜合熱效應是影響數(shù)控機(jī)床位置精度的主要誤差來源。
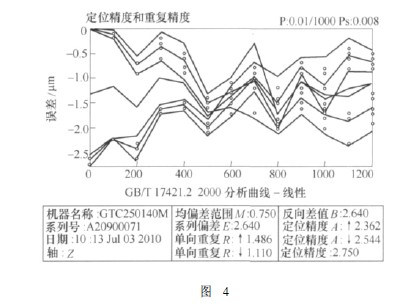
( 2) 測(cè)量標準根(gēn)據GB17421. 2—2000 評(píng)定標準(zhǔn)《機床檢驗通(tōng)則第二部分: 數控軸線的定位精度及(jí)重複定位精度的確定》進行評定。通常數控機床位(wèi)置精度包括: P 為定位精度; Ps為重複定位精(jīng)度; Pa為(wéi)位置偏差; U 為反向偏差。這些評定關鍵項目,往往是用戶最為關注,並且由此來評(píng)定機床精度的重要依據。
( 3) 測(cè)量準(zhǔn)備工作在激光幹涉儀測量機床前(qián)必須保(bǎo)證被測機床(chuáng)的幾何精(jīng)度合格。主要包括: 確保激光幹涉儀校準係統完好(hǎo)、有(yǒu)效(xiào)、準確、可(kě)靠(kào),確保機床(chuáng)整機幾何精度檢(jiǎn)驗合格(gé),確保被測機床具備檢測條件,確保機床控製係統參(cān)數(shù)設置正確,確保機床滑動部位運動自如,確保測量過程中工作環境溫度的(de)恒定。
4. 測量方法(fǎ)
( 1) 安(ān)裝調試激光幹涉儀的線性折射鏡和線性反射鏡的安裝盡量選擇機床(chuáng)測量軸線(xiàn)位置( 刀具實際工作範圍內) ,可以減少產生阿貝誤差( 見圖2) 。線性折射鏡一般安裝在機床(chuáng)固定位置上( 機床主軸位置(zhì)) ,線性反射鏡一般安裝在機床(chuáng)可動位置(zhì)上 ( 機床回轉刀架位置) 。特別指出的是(shì)線性折射(shè)鏡與激光頭安裝位置盡量靠近(jìn),因為它們之間是盲區,激光幹涉儀自動補(bǔ)償功能無(wú)法進行(háng),將會產(chǎn)生死程誤差。在調試線性折射鏡(jìng)和線性反射鏡的光路時盡
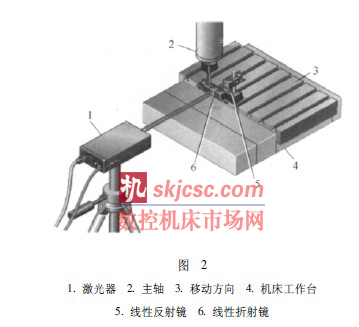
量使激光頭放射的兩束平行光的光路相互一致。但是(shì)我們在實際調試光路時由於操(cāo)作水平(píng)及安裝環境條件限製,可能產生光路的偏移,同時也就產生餘弦誤差。不過我們在實際測量中做過試(shì)驗返回到激光頭光路(lù)的偏移量在0. 5mm 範圍內,將不會影響(xiǎng)機床測(cè)量精度(dù)。如果光路偏移量過大,光路信號不在測量區域範圍內,也就無法測量(liàng)了。
( 2) 確定測量目標(biāo)位置根據GB17421 評定標
準中規定,機床規格小1 000mm 取不少於(yú)10 個測量目標位置,大於1 000mm 測(cè)量目標位置點數適當增加(jiā),一(yī)般目標(biāo)值取整數,但是我們建議在目標值(zhí)整(zhěng)數後麵加(jiā)上三位小數。主要考慮機床滾珠(zhū)絲杠的導程(chéng)及編碼器的(de)節距所(suǒ)產生的周期誤差,同時也考慮機床全程上各(gè)目標位置上得到充分地采集。
( 3) 確定采集移動方式采集數據方式有兩種:一種是線(xiàn)性循環(huán)采集方法,另一種是線性多階梯(tī)循環方法。GB17421 評定標準中采用線性循(xún)環采集方法。測量移動方式: 采用沿(yán)著(zhe)機(jī)床軸線快(kuài)速移動,分別對每個目標位置從正負兩個方向上重複移動(dòng)五次測(cè)量出每個目標位置(zhì)偏差(chà),即運動部件達到實際位置減去目標位置之差。
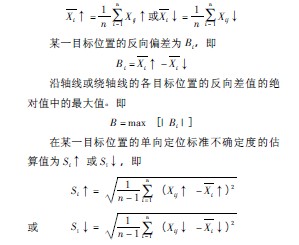
( 4) 評定方法采用雙向計算方法進行評定機床的位(wèi)置精度。目(mù)標位(wèi)置為Pi,下標i 表示移動目標位置中的(de)指定位置(zhì)。實際位置為Pij,下(xià)標j 表示移動第j 次(cì)向第(dì)i 個(gè)目標位置移動時實際(jì)到達的(de)位置。目標位(wèi)置偏差為Xij,Xij = Pij - Pi。正、負方向(xiàng)目標(biāo)位置為Xij↑、Xij↓。某一目(mù)標位置的單向平均位置偏差為Xi↑或Xi↓,即
5. 結(jié)語
測量數控機(jī)床位置精度的方法很多,但最重要的是(shì)看合同書上標注的所采(cǎi)用的那種評定標準。各國(guó)家有各自不同的評定標準及測量方法,好在我們有一個可以共同遵守(shǒu)的國際標準ISO230—2: 1997。目前我國采用的GB/T17421. 2—2000 標準是(shì)依據ISO230—2: 1997 標準修訂演變(biàn)過來的,兩個標準在數據分析數理統(tǒng)計(jì)和測(cè)量結果上(shàng)是完全一致,完全可以等同采用。
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊(xùn)合作,歡迎聯係本(běn)網(wǎng)編輯部, 郵箱(xiāng):skjcsc@vip.sina.com








