
基於海(hǎi)德漢平台的大型螺旋錐齒輪專用機床(chuáng)加工軟件設計(中)
2017-6-15 來源:沈陽工業大學 作者:衣晨(chén)
第 3 章 i TNC530 數控係統及機床參數(shù)優化
3.1 概述
螺旋錐齒輪齒麵為空間複雜曲麵,加工複雜,一般采用(yòng)多軸數控機床對其進行加工,在提高精度的同(tóng)時提升了加工效率[28]。GCMT2500 設計為六軸(zhóu)五聯動“C”型機械結構,數控係統采用國際先進的五軸數控係統代表海德漢 i TNC530 係統[29]。GCMT2500 的機械結構和數控係(xì)統基本滿足了大型螺旋(xuán)錐(zhuī)齒輪加工的各項要求。軟件開(kāi)發以海德漢數控係統為平台,利(lì)用(yòng)海德漢係統良好的開放性和提供的(de)
Python OEM高級(jí)語言開發包,使用 Python 語言對加工軟件進行開(kāi)發。同時,在不同(tóng)尺寸齒(chǐ)輪加工過程中因更換刀盤的緣故需要對控製係統(tǒng)的參數進行(háng)優化,以提高加工精度。
本章對加工軟件設計相關(guān)的開發平台——海德漢 i TNC530 數控係統、Python 開發語(yǔ)言、及重要的控製係統參數優化部分(fèn)進行了相關闡述。
3.2 i TNC530 數控係統特點
HEIDENHAIN i TNC530 數控係統是海德漢公司於近(jìn)年推出(chū)的優秀多軸數控係(xì)統解決方案。近些年海德漢 TNC 係列數產品開(kāi)始在我國數(shù)控市場嶄露頭角。i TNC530是海德漢公司 TNC 係(xì)列新一(yī)代的多軸加工數控係統中的代表,具備(bèi)前幾代 TNC 係統的(de)優點並且在不斷創新發展:新功能不斷增加,配(pèi)套的軟件更具實用性。
該數控係統適用於銑床、鑽(zuàn)床和鏜床以及加工中心。i TNC530 係統為全數字驅動控製以及借助 PWM(脈衝寬頻調製)信號(hào)控(kòng)製功率放大[30]。i TNC530 係統中的驅動控製器的卓(zhuó)越性能體現出下列優(yōu)勢: 1)係統相關軟件集成在 NC 內部,這使得 NC 的各部(bù)分(fèn)構成例如進給軸、主軸、NC 或 PLC 得到了最佳匹配。由(yóu)於位置控製器、速度(dù)控製器及電流控製器被組(zǔ)合在一個單元(yuán)內,從而(ér)可以獲得高質(zhì)量的控製。可用相同的手段(duàn)對進給驅動器以及(jí)主軸進行調試、優化及(jí)診斷。i TNC530 提供對 5 個機床(chuáng)軸(zhóu)或 11 個機床軸的數字控製,主軸速度最高可達到 40000rpm。i TNC530 使用結構緊湊型或(huò)模(mó)塊化變頻器,配合使用HEIDENHAIN 自主研發生產的類型電機,可以實現包括伺服驅動器在內的完整的(de)控製組合(hé)。
2)i TNC530 數控係統良(liáng)好(hǎo)的硬件平台為強大的控製係統提供了有力支持。采用高性能處理器的 i TNC530 係統可(kě)預讀 1024 個程序行,在程序行運行前何(hé)以合(hé)理調節(jiē)各軸電機轉速與不(bú)同輪(lún)廓間的承(chéng)接(jiē)。i TNC530 控製部分包括兩部分單元,一是 MMC主機(jī)單(dān)元,采用奔騰高性能芯片和顯示卡,能實(shí)現數(shù)據的快速處理與(yǔ)通信。二是MCC 主控單元,通過傳感器(qì)提供測量參數,利用各類反(fǎn)饋保證了伺服係統的響(xiǎng)應速度與精度。
3)針對加(jiā)工要求較高的複雜曲(qǔ)麵,i TNC530 使用了全數字化技術和先進算法,更易完成高(gāo)精高(gāo)速的(de)切(qiē)削(xuē)加工。數控係統控製數字軸最高轉速可以達到 40000r/min,同時,在確定(dìng)的運行(háng)情況下能實現各種誤(wù)差補償,更保證了工件的高質量加工。
4)優秀的診斷功能 i TNC530 數控係統具有軟硬件(jiàn)雙重診斷。在(zài)軟件上,其係統(tǒng)內部預設了診斷語句功能,在出發條件滿足後診斷執行診(zhěn)斷動作響應,設備進行(háng)相應的動作(zuò)如運行停止(zhǐ)、斷電等操作。在硬件上,相(xiàng)應的模塊配有(yǒu)專用的診斷芯片,配(pèi)合軟件(jiàn)診斷部分一共使(shǐ)用。同時,設備提供在線診斷功(gōng)能可以通過以太(tài)網添加診斷終端(duān)進行在線診斷。
5)i TNC530 操作界麵支持圖形庫功能,通過特點的編程語言(yán)配合圖形(xíng)對話模式使得編程更加(jiā)直觀便捷。編程工作站的(de)使用可以讓工作人員在機床外進行加工編(biān)程。i TNC530 係統除了(le)配備兩種編程格式外,還兼容傳統的 G 代碼加工格式,用戶能根據自身的編(biān)程習慣編寫適當(dāng)的加工代碼。
6)i TNC530 數控係統生產商為用戶(hù)提供了常用的標準加工循環,在工件成型中遇到的銑槽、鑽孔等加(jiā)工可直接(jiē)調用標準循環。在此項功能的(de)支持下,用戶(hù)隻需給定(dìng)加工參數,就可實現加工要求提供編程效率(lǜ)和精度。
3.3 Python 語言簡介
在開發中進行的軟件設計與可視化編程開發即人機界麵開發(HMI)主要使用Python 語言(yán)和(hé) wx Python 圖形庫來實現[31]。
3.3.1 Python 綜述
Python 語(yǔ)言由 Guidovan Rossum 於(yú) 1989 年發明,第(dì)一次(cì)公開發行版發行於 1991年,是(shì)一種麵向對象、解釋型計算(suàn)機程序設計語言[32,33]。Python 作為一(yī)種語法簡潔(jié)易懂功能全麵的腳本語言,不同於其他高級語言的數據結構,可以很容(róng)易的實現(xiàn)麵向對象編程[34]。Python 的(de)支持變量動態輸入特性和其解釋性的(de)特點使 Python 語言在流行的計算機係統平台上都可以良好運行(háng),尤其方便於中型項目程序(xù)的(de)快速編寫調試(shì),作為腳本語言的 Python 的這一優勢使其得(dé)到了人們的青睞。雖然作為一種教學語言,但Python 綜合了 ABC 語言的優點,不但結合其他語言如 C、C++和 Java。同時,借鑒了其他編程語言的編寫特點(diǎn),逐步優化(huà)使得 Python 語言(yán)形成了自己的特點和優勢。Python 語言(yán)作為一種優秀的開源 Script 編程語言,尤其重視程序的開(kāi)發速度以(yǐ)及程序結構的清晰度,可以很(hěn)好地完(wán)成不同程度的任務程(chéng)序,以及大(dà)中型項目的開發[35]。對於 Python 的語法上,其重要的一條就(jiù)是 Python 要求嚴格的強製縮進:模塊(kuài)的執行順序由首字符(fú)在這行的具體(tǐ)位置來確(què)定[36]。雖然初學者和一部分程(chéng)序員對此難以接受,但必須承認的是,強製縮進這一要求,使得(dé)程序員在編寫 Python 程序時形成規範(fàn)的寫作習慣,使得程序更加清晰和美觀。
3.3.2 Python 語言的優點
Python 被人們視做(zuò)是目前最適(shì)合學習計算機語言(yán)而要求掌握的入門(mén)語(yǔ)言之一。圖3.1 展示了 Python 語言(yán)優點:
圖(tú) 3.1Python 語言優(yōu)點
(1)使用簡單
編寫調試(shì) Python 程序過(guò)程非常簡單,通常隻需要編寫所需的 Python 目標程序並直(zhí)接運行就可以(yǐ)。區別於(yú)其他(tā)高級語言(例如,C 或 C++)程序編寫完成後的編譯和鏈接等其他操作步驟。Python 語言程(chéng)序快速(sù)執行特性使其形成了(le)一種交互式的編程調試模式。在程序調試的過程中(zhōng)修改程序代碼後立刻得到反饋(kuì)觀察到程序修改調試後的結果。
程序的快速開發特性僅僅是 Python 語言(yán)便捷性一(yī)方麵體現。Python 內部集成了種(zhǒng)類功能繁多的內置(zhì)模塊從而在程序編寫上(shàng)降低了其他高(gāo)級語(yǔ)言(yán)編寫(xiě)過程中常見的複雜性。在達到同一目的時使用 Python 語言編寫程序較 C、C++和(hé) Java 編寫的程序更為簡潔,使用也更具有靈活性。
(2)解(jiě)釋性
作為一種解釋性的語言,Python 程序開發(fā)過程中不需要進行不需要將代碼編譯成底層的二進(jìn)製碼,而比如 C 或者 C++類的編譯性語言則是(shì)把(bǎ)程序從源文(wén)件(jiàn)轉換成底層的計算機碼(mǎ)(即(jí)二進製代碼,0 和 1)[37]。這個過程通過專用的編譯器來(lái)完成。由於字節碼是一種與平台無關的格式,隻需要簡單的拷貝,Python 程序就可以在其(qí)他計算機運行了。Python 語(yǔ)言這(zhè)種易於移(yí)植的特性(xìng)越來越受到人(rén)們的青睞。
(3)麵向對象
從本質來說,Python 為一種麵向對象(xiàng)的語言(yán)[38]。Python 同時(shí)支持麵向過程的編程和麵向(xiàng)對象(xiàng)的編程。通常所說(shuō)的“麵(miàn)向過程”是指編寫的程(chéng)序由過程或隻是由可重複調用的函(hán)數組建起來(lái)。而“麵向對象”的語言是指編(biān)寫的程序是(shì)由數據和功能(néng)組合而成的對象構建起來(lái)。Python 的類與多重繼(jì)承等高級概念(niàn)的使用,並且憑借其(qí)特有的簡(jiǎn)潔的語法和類型非常易於使用,很大程度地提升了代碼的開發速度。
(4)可嵌入性
Python 程序可以嵌入任何 C/C++程序內部,為 python 語(yǔ)言程序使用者提供腳(jiǎo)本功能。同時,Python 也能夠調用 C 和 C++的庫,可以(yǐ)調(diào)用 C 和 C++程序,可以與 Java語言(yán)程序集成,並且通過 SOAP、XML.RPC 等接口與網絡數據交互。
(5)豐(fēng)富的(de)庫
Python 內置了(le)眾多預編譯並可移植的功能模塊(kuài),這些功能模塊被稱作標準庫(standard library)[39]。其中標(biāo)準庫支持眾多(duō)的應用程序代碼功能執行任務,包括字符模式到 Internet 腳本編程的匹配等諸多方麵。如數學公式、界麵編輯、文檔操作、正則表達式、多線程、測(cè)試、數據庫、瀏覽器、郵件、XML、HTML 和其他係統功能相關的操(cāo)作(zuò)。而且這些功(gōng)能模塊或者說庫都是集成(chéng)在 Python 內部。另外,Python 可(kě)以(yǐ)通(tōng)過自行開發的庫和眾多第三方應用進行數據擴展。這(zhè)其中涵蓋了包括網站維護、數(shù)據計算、串口讀寫、遊戲開發等多個領域。
此外,Python 提供了語言基本組成的常用數據(jù)結構。例如列表(list)、字符串(string)、字典(dictionary)[40]。它(tā)們編寫靈活且易於使(shǐ)用,不需要代碼中關於類(lèi)型和大小的冗雜的聲明,它往往(wǎng)自動地應用一種廣義上的對象。雖然國內對 Python 的(de)應用沒有其他的傳統語(yǔ)言(yán)廣泛,對應的參考資料也相對較少使 Python 的發展受到了一定程度的阻礙。然而,良好的特性與編程簡單優雅的(de)有機組合將 Python 成功塑造成為一種極具潛(qián)力(lì)的語言,具有非常(cháng)好的發展前(qián)景。
3.3.3 Python 的應用(yòng)現狀和(hé)前景
Python 作為一種年輕的語言,擁有非常(cháng)強大的生命力和無與倫比的優勢(shì)。在國內的一些主流社交網站如豆瓣、知乎等得到了廣泛的應用。在常(cháng)用的計算操作係統裏(lǐ),大多數版本的 Linux 以及 Net BSD 和 Mac OS 係統(tǒng)中 Python 作(zuò)為一種標準的係統組件集成在(zài)操作係統內部,無需安裝即可在(zài)終端直接運行 Python 程序。Python 語言中包含了若幹個可以直接調用操作係統功能的標準功能庫,使用時通過第三方軟件(jiàn)包pywin32,Python 可以訪問 Windows 的組件對象(xiàng)服(fú)務及其它應用程序接口服務。通過(guò)Iron Python,Python 能夠直接調用.net。通常來講,Python 編寫的腳(jiǎo)本(běn)管理程序在運行性能、可讀性、可擴展性、代碼維(wéi)護等多個方麵都優於其他的(de)腳本語言。Python 完(wán)善的支持多種網絡協議。在程序語言(yán)使用排(pái)行榜上,近幾年 Python 一直穩步提升,僅次於 Java、C、C++、PHP、C#等語言(yán)之後,圖 3.2 為 2010 年程序語言使用排名。對於Python 未來的發展根據其創(chuàng)始人 Guidovan Rossum 的構想,Python 除了(le)一直堅持(chí)的簡潔和優雅的本質(zhì)外更開始(shǐ)其他語(yǔ)言的(de)編程。例如(rú)加入(rù)了對中文項目開發的支(zhī)持,編程人員可以直接使用中(zhōng)文進行程序代碼編寫,這將有(yǒu)力地推動 Python 語言在國內的(de)推廣進程。
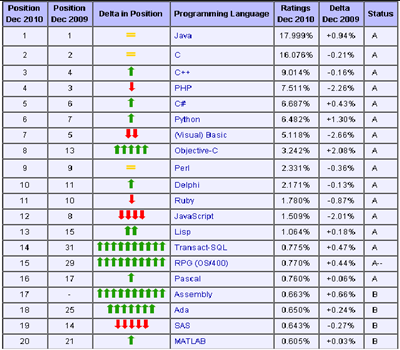
圖 3.2 2010 年計算機語言排名
3.3.4 Python 語言的不足
Python 語言的缺點主要體現(xiàn)在以下四個方麵:
(1)開發(fā)人員相對較少。比較 Java Script,參考中國和國外的使用情況,Python的開(kāi)發人(rén)員相對不足(zú),這一現狀(zhuàng)不利於 Python 的快(kuài)速(sù)發展。
(2)缺少參考資料(liào)。一種開發語言走向(xiàng)成熟的(de)過程,需要大量的出(chū)版書籍和專(zhuān)業文獻來支撐。當前,國內缺少關於 Python 的專業書籍,市麵(miàn)上存在的多半是入門級別的(de)翻譯著作,設(shè)計語言(yán)的高級部分時還需要參考英文資料。同時因為沒有走上商業產品化的道路,Python 的推廣活動較少,維護和推廣者大多(duō)為 Python 支(zhī)持與愛好者。
(3)執行速度不夠快。在現有的實現方式下 python 與 C、C++這類編譯型語言相比(bǐ),Python 的執行速度不夠快。即使當(dāng)今 CPU 的處理速度很快,在一些應用領域仍然需要優化程序的執行速度。不過,由於 Python 具有可擴(kuò)展性,部分關鍵可以調用C 或 C++編寫(xiě)的(de)程序。
(4)缺乏真正(zhèng)的支持多處理(lǐ)進(jìn)程的處(chù)理器(qì)。
3.3.5 wx Python 圖形(xíng)庫概述
Python 的簡潔以及(jí)快(kuài)速的開發(fā)周期十分適合開發 GUI 程序(xù)[41],其中界麵開發(fā)工具包(bāo)括 Qt、GTK、MFC 等。本文(wén)中使用 wx Python GUI 工(gōng)具包來完成設計 GUI 程序即界麵程序的開發設計。作為 Python 語言 GUI 工具的一(yī)種 wx Python 具有諸多優點,大(dà)量的圖(tú)形模塊使得 Python 編程人員快捷的(de)實現樣式美觀、功能強大的人機界麵。Wx Python 的一(yī)個突出的優勢就是不論各種應用場合都是免費(fèi)的,即使是商用開發也無須考慮(lǜ)版權問題(tí)。與 Python 語言相同,wx Python 的開源特性使(shǐ)任何人都(dōu)可以(yǐ)免費使用其(qí)他人共(gòng)享的程序模塊(kuài),也可以查看和修(xiū)改它其代(dài)碼或者上(shàng)傳自己開發的程序、補丁等。同時,wx Python 模塊跨(kuà)平台的優點使開發的界麵程(chéng)序在不經過任何修改(gǎi)的情況(kuàng)下能夠完美運行在多種平(píng)台(Windows、Unix、Linux 和 Mac OS)上。 對於 wx Python GUI 程序設計(jì)有(yǒu)如下基本概念。
(1)窗口,容納各種控件的容器。如按鈕、文本、狀(zhuàng)態欄等各種控件都(dōu)放置於窗口中。
(2)屬性,定義為對象的性質。表現控件在程序運行(háng)的過程中的的(de)狀態(tài)、尺寸大小、所處、顏色等等。
(3)對象,指構成界麵的(de)各種組件,例如按鈕、指示(shì)燈、點選項、文本框、圖片欄等。
(4)方法,指一類控(kòng)製對象的具體行為。比如顯示、隱藏方法用於對象顯示或隱藏,移動方法(fǎ)指移動對象到製定的位置等。
(5)事件,指的(de)是對一個組件的操作。如鼠標(biāo)在一個控件上移動時(shí),就稱為一個 Move 事件(jiàn)。
(6)響(xiǎng)應,指特定事件發生時後的產生的具體動作,響應後的具體動作(zuò)可(kě)以自定義,這個自定義動作的實現過程稱為(wéi)事(shì)件的響應。
通常情況下基本的 wx Python 程序所必須(xū)包含以下五個基本步驟:
1)導入 wx Python 模塊
2)子類化 wx Python 應用程序類
3)定義一個(gè)應用程(chéng)序(xù)的初始化方法
4)創建一個應(yīng)用(yòng)程序類的實例
5)進入應用程序的主事件(jiàn)循環
我們創(chuàng)建了一個名為 Hello world.py 的示例程(chéng)序如下(xià)
Import wx #1 導入 wx Python 包 class App(wx.App):#2 子(zǐ)類化 wx Python 應用程序類 def On Init(self):#3 定義一個應用程序的初始化方法
frame=wx.Frame(parent=None,title=’Hello world’)
frame.Show() app=App()#4 創建(jiàn)一個應用程序類的實(shí)例
app.Main Loop()#5 進入這個應用程序的主事(shì)件循環 程(chéng)序運行結果如圖 3.3,生成了一個最簡單的 wx Python 界麵程序。
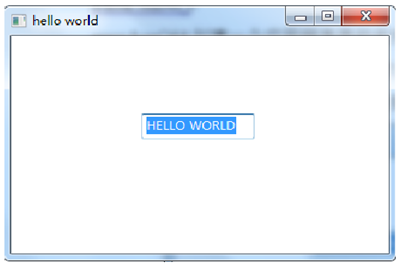
圖 3.3 Hello world.py 運行結(jié)果
3.4 係統參數優化(huà)
3.4.1 數控係統伺服驅動(dòng)
數(shù)控係統(tǒng)的伺服驅動部分是數控係統的重要(yào)組(zǔ)成,其根本作(zuò)用是對設(shè)備運動結構(gòu)部(bù)分的速度與位移進行精確控製,該部分的(de)性能優劣會對設備加工精度和工件加(jiā)工質量產生直接影響[42,43,44]。數控設備的精度一般決定於設備的兩個部分:設備的機械精度和(hé)設備的電氣控製係統部分的可控精度。機械精度(dù)主(zhǔ)要(yào)包括設備結構製造(zào)精(jīng)度、傳(chuán)動精度(dù)與裝配精度,通常來說,裝配精度在設備定型後隻可進行微(wēi)小調整,傳動精度中起決定作用的(de)導軌(guǐ)、絲杠等已到達標準上限,難以提高。所以,數(shù)控(kòng)設備(bèi)精度的提高可以在控製部(bù)分通過軟件來實現。電(diàn)氣控製係統在一般采用半閉環與全閉環兩種方式可以很好的提高設備控製部分的控製精度(dù),也可(kě)以充(chōng)分利用數控(kòng)係統的優良性能,以滿足數控設備高標準生產需求[45]。
一般情況下,數控設備的運行參數(shù)為一些缺省值,主(zhǔ)要是生產廠家根據行業標準所設定,但(dàn)在實(shí)際的(de)應用中這(zhè)些參數並不符合實際的生(shēng)產要求,參數設定(dìng)值未能達到最優化,未使設備的伺服驅動係統得到充分的發揮。所以,為了提高(gāo)設備控製部分精度,將設(shè)備參數更好(hǎo)的與生產條件相匹配,對伺服係統(tǒng)進行(háng)有效的優化就變得尤為重要。本文中(zhōng)基於海(hǎi)德漢 i TNC530 數控係統提供的 TNCopt 控(kòng)製(zhì)係統(tǒng)參數優化軟件,對螺旋錐齒(chǐ)輪專用加工機床(chuáng)進行設備(bèi)伺服驅動部分的優化(huà),完善了係(xì)統的運動特性,使運動部分和(hé)控(kòng)製部分性能達到最優(yōu)匹配,以滿足(zú)工件加工精(jīng)度與加工質(zhì)量(liàng)更高要求的標準。
3.4.2 伺服控(kòng)製係統及優化原理
設備開啟伺服軸前,要對其進行優化。i TNC530 數控設備運動控製通(tōng)過下圖 3.4所示原(yuán)理進行伺服控製,位置控製環優先於速度控製環和電流控製(zhì)環。
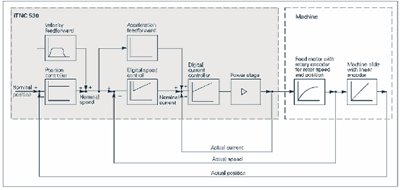
圖 3.4 控製原理圖
控製方式的(de)優(yōu)勢:1)控製區分明(míng)顯。2)控製環可以對前麵的幹擾進(jìn)行補償,提(tí)高了控製精度。3)通(tōng)過(guò)限製指令值,可(kě)以是內部的控製環得到很好的保護。4)以電流環、速度換、位置環衛順序進行優化設(shè)置。位(wèi)置、速度、電(diàn)流(liú)控製器都集成在i TNC 係統內部,驅動模塊通過 CC42X 的 PWM 信號驅動(dòng)。
理(lǐ)論上(shàng)理(lǐ)想(xiǎng)的控製係(xì)統輸(shū)入和(hé)輸出不存在滯(zhì)後即零誤(wù)差傳動,傳動的過程中(zhōng)信號傳(chuán)遞屬於線性傳輸。不過事實上,從(cóng)係統傳(chuán)動部分與控(kòng)製(zhì)部分分析,伺服電機到驅動的運動機構部分的(de)信號傳遞(dì)屬(shǔ)於二階傳(chuán)遞係統[41]即:線性與彈性共(gòng)同組合。而傳動環(huán)節中彈性環節是優化的主要目標環節,其中包含了多(duō)種頻率,各種類頻率直接作用於運動部分,頻率被抑製部分,動態特性被降低,被放大部分有一定的(de)概率使設備產生共振。在實際的生產過程中,共振產生的誤差會極(jí)大影響設備加工精度(dù)及工件的表麵質量,而對伺(sì)服控製部分進行優化可以很好的見地產生共振部分的頻率,所以進行參數優化降低共振產生的誤(wù)差是可行的。伺服控製優化的目標就是修(xiū)改(gǎi)係(xì)統缺省參數,使傳動(dòng)過程中的信號傳遞最大限度的歸於線性關係,減(jiǎn)少控製誤差避免振(zhèn)動。
數控設備係統的驅動係統伺服控製部分(fèn)包括三個環節:速度環、位置環、電流環[43]。位置(zhì)環是通過 PID 控製(zhì)中比例微分控製進行調節,對應的位(wèi)置環(huán)值隻(zhī)需對控製(zhì)器的增益常數重新設定,而速度(dù)與電流部(bù)分則是通過比例積分控製驚(jīng)醒(xǐng)調節,對應的(de)需要對增益參數(shù)和積分時間常(cháng)數進(jìn)行重新配置[46,47]。
3.4.3 控(kòng)製環參數優化(huà)步驟
控製係統各個控製環(huán)參數重新配置的具體數值,需要根據 TNCopt 係(xì)統優化(huà)軟件頻(pín)率響應圖來進行(háng)判斷(duàn)。頻率響應(yīng)曲線越平滑,頻率範圍越寬,係(xì)統的動態響應特性越好,設(shè)備的加工(gōng)進度也會更高。通過測量(liàng)加工(gōng)工件精度的方法可以更(gèng)直觀更準確的評判參數的優化數值是否達到(dào)最優值,工件(jiàn)的輪廓誤(wù)差愈小,則優化結果越好。
通過海德漢 i TNC530 提供的(de) TNCopt 軟(ruǎn)件,對控製環的 PID 參數進行測(cè)試優化伺服控製(zhì)參數。在此過程中階躍響應(yīng)、伺服(fú)軌跡跟蹤及工件精度測(cè)定更易於控製環參數的調節。按照各控製環的響應速度,優化次序依次為:電流環、速度環、位置環。
電流環控製(zhì)優化需要調節比例積分調節器中積分常數和電流環增益。速度環則組要優化速度(dù)積分常數速度環增益及(jí)濾波器選擇參數,對應 MP 參數(機床參數)為:MP2510、MP2500、MP2520。位置環優化部分隻須對位置環增(zēng)益進行(háng)優化即可,對應(yīng) Machine parameter MP1510。以電流環部分為例(lì),電流控(kòng)製環優化參數如圖 3.5 所示:
圖 3.5 電流控製(zhì)參數
MP2420:電流(liú)環比例係(xì)數,“+/.”為參(cān)數增減值,1.0[V/A]為步(bù)距大小。
MP2430:電流環時間積分係數,“+/.”為參(cān)數增減值(zhí),500[VS/A]為步距大小。
MP2420(P 係數)和 2430
(I 係數)動態響應曲線標準如下圖 3.6 至 3.9(逐漸增減參數):
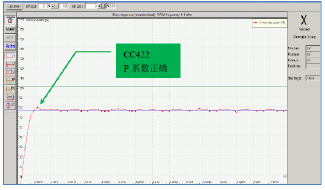
圖 3.6 響應曲線 1
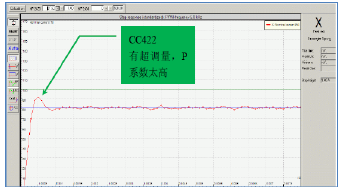
圖(tú) 3.7 響應曲線 2
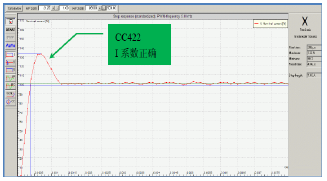
圖 3.8 響應曲線 3
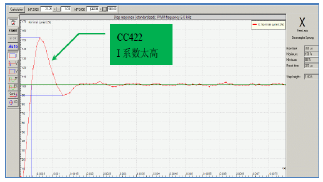
圖 3.9 響應曲線 4
在運(yùn)行(háng) TNCopt 控製(zhì)係統優化軟件時,可以先應用軟件的自動優化功能,根據自動(dòng)優化模式下響應(yīng)曲線的特性與經驗,在此基礎上進行(háng)手動模式下的優化。使用TNCopt 自動優化,確定 MP2420 和 MP2430,步驟如(rú)下:
1)將 MP2420 初始值設為“1”,MP2430 設為“0”。
2)按(àn)AUTO 命(mìng)令
3)選擇菜單 Measure/Start 或按 按START鈕開(kāi)始自動優化。
4)自動優化達到最優時軟件停止優化。
以設(shè)備 X 軸電流環自動優化過程為例為例,獲得如圖 3.10 的控製係統參數自動優化曲線圖。
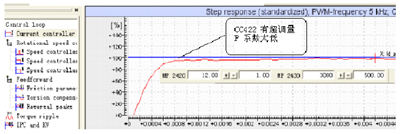
圖 3.10X 軸電流(liú)環自動優化圖
自(zì)動優化後可根(gēn)據實際(jì)設備參數要求進行手動模式化下的優化,如圖 3.12 所示(shì)曲線為自動優(yōu)化後手(shǒu)動調整曲線。
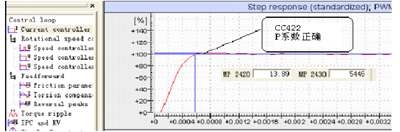
圖 3.11X 軸電流環手動修正圖
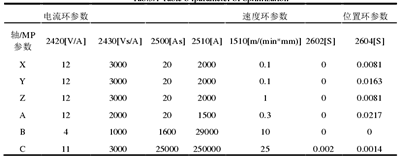
重複上述過程對(duì)各軸進行優化後得到的一組設備優化參數如表 3.1 所(suǒ)示,其中電(diàn)流環參數 MP2420、MP2430,速度環(huán)參數 MP2500、MP2510,位置環參(cān)數 MP1510、MP2602、MP2604。
表 3.1 參數優(yōu)化表
3.4.5 優(yōu)化效果檢(jiǎn)測
在執行螺旋錐(zhuī)齒輪銑削對比試驗(yàn)時,先(xiān)將優化後所得到的參數通過宏程序調用(yòng)(輔助 M 功(gōng)能)。運行設備完成若(ruò)幹組齒數的銑削加工後與優化(huà)參數與缺省狀(zhuàng)態下的(de)加工狀態(tài)進行對比。如(rú)圖 3.12 所示為控製係統優化參數優化前後的齒輪效果對比。
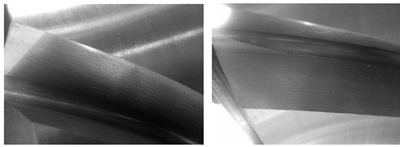
圖 3.12 伺服控製參數優化前後齒輪質量對比
經(jīng)對比發現,優化前後加工齒麵質量得到了明(míng)顯的改善,通過簡單的技(jì)術測量,齒輪整體精度得到了一定的提升,參數優化取得(dé)了效果良好效果。以上對比說明(míng),在控製係統參數(shù)優化後,機床的控製精(jīng)度、工件加工質量都得到了提(tí)高。這一技(jì)術為TNC 同係(xì)列產品控製係統參數優化提供了參考
3.5 本章小結(jié)
本章主要對(duì)軟件開發平台與設備參數優化進(jìn)行了介紹。首先介紹了軟件的開發平台——海德漢 i TNC530 數(shù)控係統,對該數控係統的特點進行了介紹。然後,對軟件(jiàn)設計語(yǔ)言 Python 及內部圖形庫 wx Python 進行了(le)說(shuō)明。最後,介紹了數控設備伺服驅動部分和控製係統的本質與優化原理,對 i TNC530 數控(kòng)係統設備參數進行優化,並通過實際加工對比,闡(chǎn)明了(le)在螺旋錐齒輪的生成(chéng)加工過程中,設備控製係統參數優(yōu)化的實用性與必要性。
投稿箱:
如果(guǒ)您有機(jī)床行(háng)業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
如果(guǒ)您有機(jī)床行(háng)業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
更多本專題新聞
名企推薦







專題點擊前十
| 更多

