
1 引言
隨著科學技術的不(bú)斷發展,現有製(zhì)造業的產品研發能力,工藝編製水平及製造能力也有(yǒu)了明顯的提高。各種新產品、新技術層出不窮,在高質量產(chǎn)品的製造和高效率生產環境的構建中,測量技術起(qǐ)到了很大的作用,其重(chóng)要性與日俱增。尤其在生產國際化(huà)、全球(qiú)經濟一體化迅速發展(zhǎn)的時(shí)期,要求不同地區生產的高精度零部件,必須保證其高精度的要求。現有大(dà)多數高精度要求的(de)零部件都是在數控機床中加工出來的,雖然數控機(jī)床的加工(gōng)精度很高,但由於(yú)一些其他原因列如:人為原因(yīn)、機床故障原因(yīn)等等引起的(de)一些誤差,怎樣通過一係列方法找(zhǎo)出誤差並測量出(chū)這些數據值,這對(duì)我們是非常重要的。
根據多年的實際工(gōng)作經(jīng)驗,利用一些金屬探頭裝置來進行檢測。首先(xiān)把金屬探頭裝置安裝在機床主軸上,其次再利用所編製出的數控測量程序進行零部件的(de)檢測和(hé)數值計算。最終總結出一套在轉子局部加(jiā)工過程(chéng)中的測量編程方(fāng)法。利用此方法(fǎ)的檢測,能夠(gòu)有效地保證圖紙幾何精度及位置精度。程序具有靈活、方便、使用性強的特點。
2 通用子程序(xù)的編製
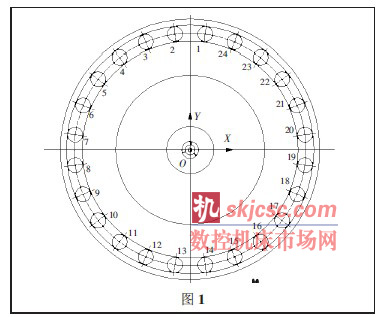
根據汽輪機轉子連軸器端法(fǎ)蘭的結構特點如圖1,在轉(zhuǎn)子的電端及調端法蘭處有(yǒu)24 個對接通孔,要求每個(gè)孔的直徑(jìng)公差必須保證在0.015mm 以內,而且每個孔相(xiàng)對於(yú)轉子中心O 點位置度要求(qiú)也在0.015mm 以內。加工此零件的難度較(jiào)大,要保證其設計要求就必須通過反複測量多次加工來實現。所以就要編製一(yī)些(xiē)通用的子程序,這樣每次加工時隻需讀取(qǔ)相應(yīng)的參數即(jí)可。
2.1 能夠測量x-、x+、y-、y+方向上的子程序
如圖1 法蘭上有(yǒu)24 個孔,我們以其中一(yī)個孔為例來進行計算。要測量在x 軸及y 軸正負(fù)4 個矢量方向(xiàng)的數據,就(jiù)要4 個通用的(de)子程序,每一(yī)個單獨的子程序能夠計算相應方向的數據,並進行分析。這(zhè)4 個子程(chéng)序分別是:
%_N_L1001_SPF
;$PATH=/_N_MPF_DIR
;+X 測量
N05 STOPRE
N10 SPOS=0
N15 R21=$AA_IW[X]
N20 G01 F150 MEAS=1 X=R21+10
N25 IF $AC_MEA[1]==0 GOTOF ALARM
N30 STOPRE
N35 R11=$AA_MW[X]
N40 G01 X=R21 F800
N45 GOTOF END
N50 ALARM:
N55 MSG("juli chaoguo 10.00mm")
N60 M00
N65 END:
N70 M17
%_N_L1002_SPF
;$PATH=/_N_MPF_DIR
;-X 測量
N05 STOPRE
N10 SPOS=180
N15 R21=$AA_IW[X]
N20 G01 F150 MEAS=1 X=R21-10
N25 IF $AC_MEA[1]==0 GOTOF ALARM
N30 STOPRE
N35 R12=$AA_MW[X]
N40 G01 X=R21 F800
N45 GOTOF END
N50 ALARM:
N55 MSG("juli chaoguo 10.00mm")
N60 M00
N65 END:
N70 M17
%_N_L1003_SPF
;$PATH=/_N_MPF_DIR
;+Y 測量
N05 STOPRE
N10 SPOS=270
N15 R21=$AA_IW[Y]
N20 G01 F150 MEAS=1 Y=R21+10
N25 IF $AC_MEA[1]==0 GOTOF ALARM
N30 STOPRE
N35 R13=$AA_MW[Y]
N40 G01 Y=R21 F800
N45 GOTOF END
N50 ALARM:
N55 MSG("juli chaoguo 10.00mm")
N60 M00
N65 END:
N70 M17
%_N_L1004_SPF
;$PATH=/_N_MPF_DIR
;-Y 測(cè)量
N05 STOPRE
N10 SPOS=90
N15 R21=$AA_IW[Y]
N20 G01 F150 MEAS=1 Y=R21-10
N25 IF $AC_MEA[1]==0 GOTOF ALARM
N30 STOPRE
N35 R14=$AA_MW[Y]
N40 G01 Y=R21 F800
N45 GOTOF END
N50 ALARM:
N55 MSG("juli chaoguo 10.00mm")
N60 M00
N65 END:
N70 M17
以上所編製的子程序具有結構簡單,通用性強的特點。對於任意(yì)相似(sì)零件的測量工作也有很好的實用性。首先根據測量點定位好主軸位置,為確保檢(jiǎn)測精度,每次測(cè)量都要(yào)以測頭的同一點進行,這樣可以把誤差降到最小。自(zì)動記錄主軸位置並進(jìn)行檢測,在10mm 距離內完成測量,如果超出範圍(wéi)將提示“距離超過10.00mm”程序停止。如(rú)果在10mm 距離內完成測量,將自動記錄數據(jù)到(dào)R 參數裏麵(miàn)。之後在X、Y 坐標軸上完成其餘方向的(de)測量工作。
2.2 用於測量的主程(chéng)序
%_N_1000_MPF
;$PATH=/_N_MPF_DIR
;R3===內孔直徑
;R5===測量孔(kǒng)中心X
;R6===測量孔中心Y
;R7===測量孔直徑X
;R8===測量孔直徑Y
N10 G00 Z25 W0
N15 G00 X0 Y0
N20 G01 Z-10 F800
N25 R4=(R3/2)-8
N30 G01 X=R4 Y0 F800
N35 L1001 P1
N40 R31=R11
N45 L1001 P1
N50 R41=(R31+R11)/2
N55 R11=R41
N60 G01 X=-R4 Y0 F800
N65 L1002 P1
N70 R32=R12
N75 L1002 P1
N80 R42=(R32+R12)/2
N85 R12=R42
N90 G01 X0 Y=R4 F800
N95 L1003 P1
N100 R33=R13
N105 L1003 P1
N110 R43=(R33+R13)/2
N115 R13=R43
N120 G01 X0 Y=-R4 F800
N125 L1004 P1
N130 R34=R14
N135 L1004 P1
N140 R44=(R34+R14)/2
N145 R14=R44
N150 R5=(R11+R12)/2
N155 R6=(R13+R14)/2
N160 R7=R11-R12+6
N165 R8=R13-R14+6
N185 M30
對於每(měi)一個孔分別調用一次子程序,來(lái)完成每個孔(kǒng)的測量工(gōng)作,之後在(zài)數控麵板中找出相(xiàng)應R 參數的(de)數值,根據數控係統中所(suǒ)記(jì)錄的數據進行比對、分析(xī)。最後根據所分析的(de)數值來調整工件坐標(biāo)原點,使之滿足設計要求,再(zài)進行精鉸銷孔的(de)工作。
3 結語
由此可見,在程(chéng)序(xù)中能夠實現自動測量。有些R 參數直接在圖紙上就查到,這些R 參數都是固定的並存儲(chǔ)在(zài)機床中,調用子程序編程十分方便。通過這種編程方法,提高了轉子數控加工程(chéng)序的準確性和工(gōng)作效率。通過該項(xiàng)目研究,積累了經驗(yàn),能夠滿足(zú)產品質量及設計要求,這些經驗在(zài)整個大件數控加(jiā)工中得到了推廣應(yīng)用。
此測量程序采用了數控係統中的自由編程語(yǔ)言,通過係統數據交換方式控製加(jiā)工過程。這種通用子程序的開發,與西門子公司提供的(de)通用子程序具有同樣技術水平,在大型、高精度零部件的加工中更具有實用價值。
如果您有(yǒu)機床行(háng)業、企業相關(guān)新聞稿(gǎo)件發表,或進行資訊合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com






馬")

