
螺紋數控修複(fù)車床主軸部件動態特(tè)性分(fèn)析(中)
2017-4-7 來源(yuán):沈(shěn)陽工業大(dà)學 作者:肖磊
第 3 章(zhāng) 螺紋數控修複車床(chuáng)主軸部件有限元分(fèn)析
3.1 螺紋數控修複(fù)車床主軸部件簡介
對主軸部件進(jìn)行動態特性(xìng)分析,首先要對主軸建立合理(lǐ)的有限元(yuán)模型。在對主軸進行有限元建模時要考慮到諸多因素對其動態特性的影響,比如在劃分單元、處理結合麵(miàn)問題以及考慮軸承支撐剛(gāng)度等問題時都要仔細分析,以便最後計算(suàn)出最(zuì)接近(jìn)主軸工作(zuò)狀態下動態特性。因此在對主軸(zhóu)進行動態特性分析時,一定要正確處理好模態(tài)分析各種因素對其動態特性的(de)影響,合理設置其影響參數,為下一步進(jìn)行(háng)有限元分(fèn)析計算打好基礎。本章在借鑒以前學者(zhě)在類似動力學問題(tí)分析的基礎上(shàng),對現有的(de)一(yī)款螺紋數控修複車床的主軸係統進行合理(lǐ)的有限元建模。
3.1.1 主軸結構介紹
該(gāi)數控螺(luó)紋修複(fù)車床為石(shí)油(yóu)行業的專用機床,主要用來車削修複鑽鋌、鑽杆(gǎn)等鑽具。工作時,鑽具由送料(liào)架從左端輸送至主軸內部至右側(cè)卡盤處,再由卡盤卡緊(jǐn),通過主軸旋轉帶動工(gōng)件旋轉(zhuǎn),由(yóu)刀具完成切削修複工作。主軸旋轉帶動工件旋轉為機床的主運(yùn)動,其動態特性直(zhí)接影響機床的切削精度,所(suǒ)以對(duì)該車床主軸部件(jiàn)進行動態特(tè)性分析具有重要(yào)的現實意義。
該車床主軸部件如圖 3.1 所示,主軸後端由背靠背的(de)兩個圓錐滾子軸(zhóu)承支撐,前端(duān)由(yóu)一個雙列圓柱滾子軸(zhóu)承支撐,軸承靠端蓋、箱體和鎖緊螺母實現軸向定位,同時(shí)箱體(tǐ)內壁設置有軸承潤滑係統,軸上齒輪也由兩個鎖緊(jǐn)螺母實現軸向(xiàng)定位。
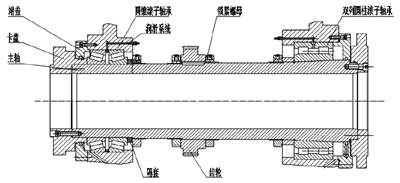
圖 3.1 主(zhǔ)軸部件結構示意圖
3.1.2 主軸模型簡化
通過查閱大量相關資料,發(fā)現在進行主軸動態特性分析時,一(yī)些結構上的細節(jiē)問題對動態分析結果影響很小,所以為了降(jiàng)低工作量,縮短(duǎn)有限元分析計算的時間,設計人員(yuán)通常會在主軸進行有限元建模前會對其(qí)進行必要的簡化,以提高工作效率[33,34],主要體現(xiàn)在以下幾個方麵:
(1)對於安裝在主軸(zhóu)上及內部且不屬於主軸本體的傳動零件,在進行動態特性分析時隻考慮他們的分布質量,將其質(zhì)量等效附在(zài)主軸或主軸架的(de)壁厚上(shàng)。
(2)忽略對主軸質量影響較小的(de)結構,如主軸上的螺紋孔,鍵槽及(jí)尺寸較(jiào)小的凸(tū)台等,這(zhè)些結構對主軸的振動特性影響較(jiào)小,可以忽略不計,在建模時進行必要簡化,可以(yǐ)簡化網格劃分,減少前(qián)期準備時間。
(3)去除功能件和非承載件,合理修改和補充截麵形狀;對非關鍵部位的孔、退刀槽及(jí)台階等盡量(liàng)簡化,對截麵特性影響(xiǎng)較小的(de)結構適當忽略(luè)。
(4)簡化主軸上的節點,對距離很近的兩個(gè)節點可視為一個節點處理,對(duì)於靠的很近並且結構和功能相同的構件等效成一個構件。
(5)對支撐(chēng)主軸的軸承進行簡化(huà)處理,忽略軸承的角剛度,隻考慮其徑向剛度,即將軸承簡化為隻提供徑向支(zhī)撐力並可壓縮的彈簧。
(6)材(cái)料本身特性具有線性和(hé)非線性,各向同性和(hé)各向異性等差別,在(zài)對機械結構(gòu)進行模態分析時,通常隻考慮(lǜ)結構材料屬性中的線(xiàn)性特征,必須對結構材料的彈性模量 EX 和密度 DENS 等進(jìn)行設定,忽略其屬性中的非線性特征(zhēng)對(duì)機械結構動態特性的影響。
本文在充分(fèn)考慮上述條件後,對該車床主軸(zhóu)部件進行了適當的簡化。忽略了主軸兩端的螺紋孔;對尺寸變化較小的部分軸段進行了統一尺寸;忽略了(le)主軸連接齒輪部分的鍵槽;忽略了主軸(zhóu)兩端及各軸肩處的倒角等。圖 3.2 即為簡化處理後的主軸結構簡圖。
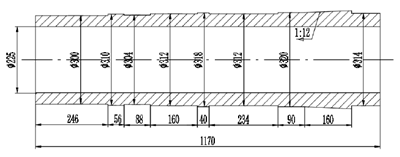
圖 3.2 簡化後的主軸(zhóu)結構
3.2 主軸的有限元模(mó)型
3.2.1 主軸有限元建模方法
對主軸進行有限元建模屬於有限(xiàn)元分析的前處理部分,也(yě)是機械結構有限元模態分析最重要的一環(huán),能否合理建立模型對後續分(fèn)析計(jì)算(suàn)的準確性和(hé)計算成(chéng)本產生直接影響[35]。目前對主軸進行(háng)有限元建模主要有兩種方式,一(yī)種是通過有限元軟件直接建模,另一種是利用其它三維實(shí)體建模(mó)軟件對主軸進行建模,再通過數據轉換將建好的實體模型轉換到有(yǒu)限元分析軟(ruǎn)件中(zhōng),建立有限元模型。兩種方(fāng)法各有優缺點,設(shè)計(jì)人員可根據實(shí)際情況進行(háng)選擇。
在有限元軟(ruǎn)件中(zhōng)有兩種建模方法:自頂向下與自底向上。自頂(dǐng)向下進行有限元建模時,首先需要設定一個最(zuì)高(gāo)級圖(tú)元(yuán),如棱柱、四方體、球體等,用戶可通過布爾運算進行圖元的相互數學運算,得到所要建立的有限(xiàn)元模型。自底向(xiàng)上進行有限(xiàn)元建(jiàn)模時,首先在最(zuì)低級的圖元上構造(zào)模型,如關鍵點,線,麵等,通過相應的拉伸、旋轉等過程,最終建立結構(gòu)的有限(xiàn)元模型。而通過其他三維實體建模軟件建模再利用數據(jù)轉換導入到有限元分析軟件進行結構的有限元建模相對簡單些,可以節省設計時間。本文數控螺紋修複車床的主軸為簡單的階梯軸(zhóu),截麵形狀較為簡單,采用第二種建(jiàn)模方法進行有限(xiàn)元建模。
首先利用二維製圖軟件繪製主軸的截麵(miàn)圖,並將其導入三維建(jiàn)模軟件中旋轉即得到了主軸的三(sān)維實體模(mó)型,保存成.prt 格式文件,即可將其導入有限元分析軟件中,進行網格劃分,建立的主(zhǔ)軸模型如圖(tú) 3.3 所示(shì)。
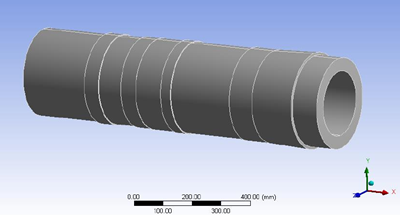
圖 3.3 主軸模型
3.2.2 單元(yuán)選擇(zé)和材料設置
通過前(qián)麵的介紹分析,主軸結構(gòu)較為複雜,對於本課題所研究的階梯中空主軸應采用三維實體單元對其進行模擬分析。有(yǒu)限元軟件(jiàn)提供常用的三維實體(tǐ)單元有SOLID45、SOLID46、SOLID64、SOLID87、SOLID90、SOLID95 等,本文主要研究主(zhǔ)軸係(xì)統自身在裝配條(tiáo)件下模(mó)態參數的變化情況(kuàng),選取 SOLID45 單元進行模(mó)擬分析,用於三維實(shí)體結構模型,如圖 3.4 所示。
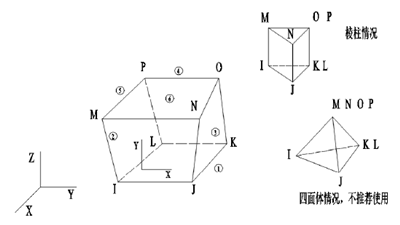
圖 3.4 SOLID45 單元的幾何形狀
SOLID45 單元是由 8 個節點在空間結合而成,每個節點有 X、Y、Z 三個方向的自由(yóu)度。該單元具有塑性、蠕變、膨脹、應力強化、大變形和大(dà)應變的等(děng)特征(zhēng),通過其可以獲得簡化的綜合微控選項。表 3.1 為 SOLID45 單元(yuán)的輸入參(cān)數。 表 3.1 SOLID45 單元的輸入參數(shù)
表 3.2 結構材料(liào)的屬性(xìng)參數
3.2.3 網格劃分
有限(xiàn)元軟件提供了多種網格劃分方式,如 Sweep 網格劃分、Tetrahedrons 網格劃(huá)分、Automatic 網格劃分和 Multi Zone 網格(gé)劃分(fèn)等方法,根據主軸形狀(zhuàng)和(hé)計算精確性,選取Multi Zone 網格劃分方法對主軸進(jìn)行網格劃(huá)分,可以自動將主軸不(bú)同尺寸軸段劃分成(chéng)多個獨立規則區域,並對每一(yī)區域進行掃略網格劃分,能夠得到規則的六麵體網格,相對於其他網格劃分更簡單便(biàn)捷,圖 3.5 為使用此方法獲得的主軸有限元模型,共獲節點84570 個(gè),單元(yuán) 74657 個。
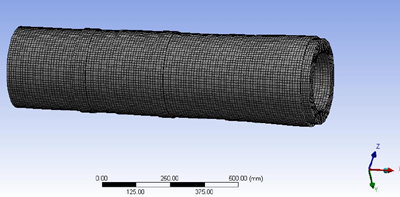
圖 3.5 主軸有限元(yuán)模型(xíng)
3.3 主軸的自由(yóu)模態分析
機械結構的自由(yóu)模(mó)態是(shì)其(qí)本身的固有屬性,與外加約束和外加載荷均沒有(yǒu)關係,由於結構本(běn)身可(kě)以看成是由無數個單元個體組成的實體,所以理論上(shàng)結構擁有無數階固有頻率,在進行模態分析後,能夠得到其(qí)所有頻率和振型。當機械結構受到外(wài)加載荷作用時,可以根據其各階頻率來判斷結構是否穩定,從而提高機(jī)械結構整體的抗振(zhèn)性,為設計人員(yuán)在前期設備設計(jì)過(guò)程中提供參照標準和進(jìn)行優化(huà)設計提供可靠依據。用戶在利用(yòng)有限元分析(xī)軟件分析(xī)時可采用多種分析計算方法,如 Block Lanczos(分塊(kuài)蘭索斯法)、Subspace(子空間法)、Reduced(縮減法)、Unsymmetric(非對(duì)稱法(fǎ))和 Damped(阻尼法)等方法,本文采用在求解大型矩陣特征值問題中最有效的一(yī)種(zhǒng)方(fāng)法 Block Lanczos(分塊蘭索斯法)對該主軸進行模態分析。
在 Block Lanczos(分塊(kuài)蘭索斯(sī)法)計算自由模態時,由於主軸沒有受到(dào)任何外加約束條件(jiàn),所以計算結果中主軸的前六階頻率都接近(jìn)於 0,振型均為剛體(tǐ)模態,主軸本身沒有發生彈(dàn)性形變,而是主軸在平(píng)麵內發生平動,所以忽略主軸的前六階低階固有頻率,提取主軸(zhóu)的前十二階模態結果,頻率設置範圍是 0 至 10000Hz。在第七階頻率開(kāi)始,才是主軸真正意義上的一階模態頻率(lǜ),將(jiāng)第七階頻(pín)率視為主軸自由狀態下的第一階固有頻率,前六階頻率值見表 3.3,各階振型見圖 3.6。
表 3.3 不加約束(shù)的主軸前六階固有頻率和振型

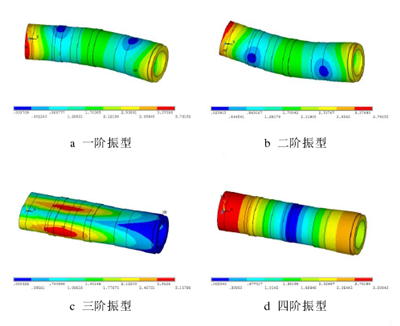
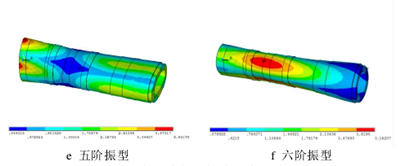
圖 3.6 不加約束的主軸前六階振型
從主軸模態分析結果(guǒ)可以看出,主軸的(de)一階和二階固有頻率相(xiàng)近,並且其振型表現為正交,因此(cǐ)可將其視為(wéi)複(fù)根,主軸的第一(yī)階模(mó)態表現為主軸的垂直方向(Y 向)上的一階彎(wān)曲振動,第二階模態表現為主軸橫向水平方向(Z 向)的一(yī)階(jiē)彎曲振動,且最大(dà)彎曲變形均發生在(zài)主軸的兩(liǎng)端(duān)。第(dì)三階模態表現為扭(niǔ)轉,沒有(yǒu)發生(shēng)彎曲變化。主軸的第四階、第五階和第六階均發生了徑向擴張或收縮。
3.4 考慮軸承剛度的主軸模態分析
由於主(zhǔ)軸在工作過程中並不是單獨運動,而是受(shòu)到主軸係統(tǒng)中其他部件提供的外加載荷影響,如支撐係統的剛度,在本課題(tí)研究的數控螺紋修複車床中,主軸回轉運動是機床(chuáng)的(de)主運動,主軸回轉運動同時帶動軸承內(nèi)圈一起做回轉運動,因此,軸承的支撐(chēng)剛度(dù)對主軸係(xì)統的動態性(xìng)能影響極大。一般設計人員在做這類主軸的動態特性分析時往往會(huì)把軸(zhóu)承的支撐(chēng)剛度考慮進來,從而更加(jiā)真實準確的模(mó)擬在實際工作狀(zhuàng)態下主軸的動(dòng)態性能,下麵就分析該主軸在考慮軸承支撐剛度約束條件下的動態性能。
3.4.1 結(jié)合(hé)麵的處理
機械係統往往由多個零部件組(zǔ)成,在對機械結(jié)構進(jìn)行有限元建模時也要考慮到部件或零件之間的相互影響,因係(xì)統(tǒng)部件或零件之間存在相互作用力(lì),對彼此的動態性(xìng)能產(chǎn)生影響,所以(yǐ)在對機械結構進行動力(lì)學特性分析時要考慮到這(zhè)個影響因素。我們稱機械結構係統部件(jiàn)或零(líng)件(jiàn)之間相互接(jiē)觸的(de)麵為結(jié)合麵,對結合麵如何進行適當處理一直以來都是有限元動態分析的難點。在有限元模型中,結構係統的部件可以根據需要劃分(fèn)成若(ruò)幹(gàn)個子結構,處理結(jié)合麵問題就是處(chù)理子結構之間的相互(hù)影響,實際部件之間的結合麵結構是非常複雜的,但在有限元分析中,通(tōng)常將結(jié)合麵(miàn)簡化為若幹個(gè)連接點來處理,通(tōng)過不同數(shù)目的結合(hé)點,結(jié)合(hé)點的(de)自由度情況以及具體的結合(hé)條件來描述不(bú)同的結合狀態。根據子結構結合麵是否有相對運動,可將結合狀態分為剛性結合和柔性結合[36,37]。
兩個子結構(gòu)接觸麵沒有相對(duì)移動,即結(jié)合麵上的對應接觸點位移始終保持相對(duì)靜(jìng)止(zhǐ),這樣(yàng)的(de)結合成為的剛性結合(hé)。這時接觸麵上的數(shù)學模型為:
位移對應關係:

在剛性結合中,事實上,結合點就是子結構(gòu)結合麵(miàn)之間對應的無數結合點被人為假設分開後形成的,對於這樣的連接處理較為簡單,在結合處對所要分析對象施加外載荷即(jí)可模擬相互之間的影(yǐng)響(xiǎng)。柔性連接則較為複雜,在機(jī)械結構實際工作過程中,零部件連接部分通常會發生振動而產生微小的相對運(yùn)動,如旋轉軸(zhóu)與軸承之間的連接,部(bù)件之間(jiān)的螺釘連接等(děng)情況。對於本課題研(yán)究(jiū)的主軸係統,當機床工作運(yùn)轉時,主軸及主軸的支撐係統都會發生振動,即主軸(zhóu)與軸(zhóu)承之間的結合麵(miàn)會發生相對(duì)運動,在這過程中,儲存能量與消耗能(néng)量交替進(jìn)行,兼具彈性與阻尼特征。在處理(lǐ)結構的柔性連接問(wèn)題時,通常采(cǎi)用彈性元(yuán)件和阻尼元件來模擬(nǐ)這類連接問題,即在每一(yī)個結合點的每一個運動方向,同時(shí)用一個(gè)彈性元件和一個(gè)阻(zǔ)尼(ní)元件來模擬運動情況。
如圖 3.7 所示為本文簡化的(de)主軸結(jié)合部模型,係統由外加載荷 F 作用在(zài) A 結構上的(de) G 點,A,B 結構之間的(de)相對運動(dòng)情(qíng)況利用一定數目(mù)的等效彈簧和自阻(zǔ)尼器來模擬,這種連接情況即為柔性連接。
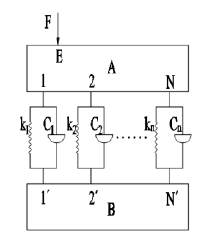
圖 3.7 結合部簡化模型
3.4.2 單元選擇和約束(shù)限製
在(zài)主軸的實際工作時,軸承支撐(chēng)對其有(yǒu)柔性(xìng)約束作用。有限元分析軟件中提供了模擬類似柔性約束的單(dān)元來進行模擬分析其動(dòng)態特(tè)性。通常選用(yòng) GOMBIN14 單元來模擬主軸與軸承的結合麵相對運動情況,其幾何形轉、節點方向及(jí)坐標軸方(fāng)向如圖 3.8所示,GOMBIN14 單元在二維空間(jiān)上具有(yǒu)兩個自由度,可以在任意兩個節(jiē)點連接方向上傳遞載荷,同時其具有兩(liǎng)個(gè)節點以及一個定向(xiàng)節點。GOMBIN14 單元不具備彎曲和扭轉,隻考慮其軸向(xiàng)的伸縮變化,本身不具備質量。
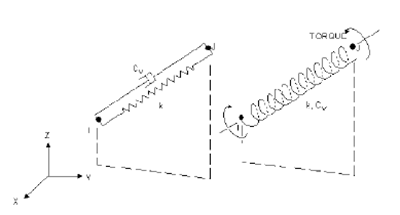
圖 3.8 GOMBIN14 的幾何形狀
由於 GOMBIN14 單元不(bú)具有質量,為了模擬軸承及其附加件對主軸動態特性的影響,有限元(yuán)分(fèn)析軟件還提供了 MASS21 質(zhì)量單元來模擬軸承及其緊固件來添加質量,其空間形狀如圖 3.9 所示。MASS21 質量(liàng)單元在(zài)三(sān)個方向上的坐(zuò)標軸上共有六個自由度,並且每個方向都有質量和轉動(dòng)慣量,通過賦值實常數即可實現模擬(nǐ)。

圖 3.9 MASS21 的幾何形狀
上文已經對該(gāi)主軸劃分(fèn)網格(gé)完畢,得到了自由狀態下主軸的精確(què)六麵體網格劃分結構,並對材料屬性參數進行賦值。在考慮(lǜ)軸(zhóu)承支撐剛度條(tiáo)件下,需要對主軸設置外加約束限製(zhì),以模擬軸承(chéng)與主軸結合麵的實際工作情況。為了更(gèng)加真實的模擬軸承對主軸的約束情況,將自由狀態下劃分網格完畢的主軸模型保存成.inp 格式的文件(jiàn),利用有限元分析(xī)軟件強(qiáng)大的數據對接功能,將文件再次導入,以精確添加軸承的約束條件。通常將軸承及其緊(jǐn)固(gù)件(jiàn)視為在圓周方向等(děng)效分布的四(sì)個彈簧 ,用彈簧阻尼(ní)單元GOMBIN14 模擬軸承(chéng)的支撐[38],軸承(chéng)分布圖(tú)如圖 3.10 所示,圖中 T1、T2、T3、T4 四個節點為軸承與主軸截麵相結合的節點,T5、T6、T7、T8 四個節點為軸承的另一端,為(wéi)了限製主軸的軸向方向的移動,在節點 T1、T2、T3、T4 施(shī)加軸向約束,限製其(qí)軸向自由度,彈簧的另(T5,T6,T7,T8)為固定約束,約(yuē)束其全部自由度。
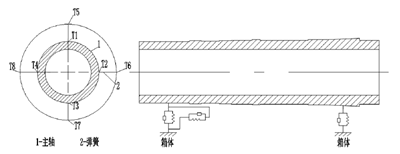
圖 3.10 彈簧的分布示意圖
本文(wén)主軸後端由兩個圓錐滾子軸承支撐,前端由一個雙列圓柱滾子軸承支撐,所以(yǐ)軸承約束共由 20 個 GOMBIN14 單元和 20 個 MASS21 質量單元模擬實現。圖 3.11即為添加軸承約束(shù)條件後的主軸有(yǒu)限元模(mó)型。
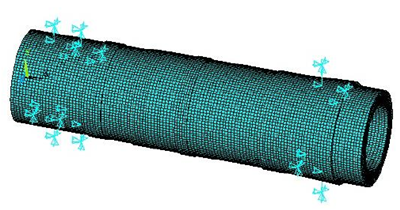
圖 3.11 添加約束的主軸有限元模型
3.4.3 軸承的剛(gāng)度計算
主軸工作過程中受到軸承的支撐作用,二者之間結合麵為(wéi)柔性結合,因此在對主軸進行有限元模態分析時,一定要考慮軸承支撐剛度對主(zhǔ)軸動態特性的(de)影(yǐng)響,下麵就對本課題研究的(de)數控螺紋修複車(chē)床所選用的(de)軸承進行剛度計算,為下(xià)麵的主軸(zhóu)模態分析提供參數具體數據。
(1)軸(zhóu)承具(jù)體參數
本主軸所選用的軸承為一對圓錐滾子軸(zhóu)承和一個雙列(liè)圓(yuán)柱滾子軸承,其型號分別為 HR2-32960-P5 型圓錐(zhuī)滾(gǔn)子軸承和(hé) NNU4064KM/W33-P5 型雙列圓柱滾子軸(zhóu)承。滾子軸承有很多參數,所以在表 3.4 中列出滾(gǔn)子軸承所需(xū)的(de)各項參數及(jí)其代(dài)表內容。
表 3.4 軸承參數
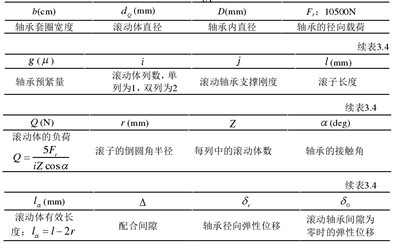
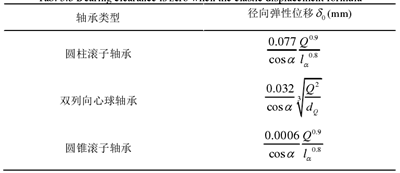
表 3.5 列出了軸承(chéng)遊隙為零時的(de)各類滾子軸承其彈性位移的計算公式:
表 3.5 滾動軸承遊隙為零時的彈性位移計算公式
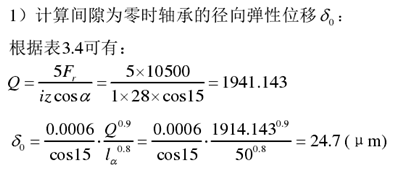
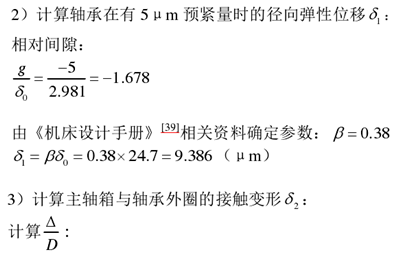
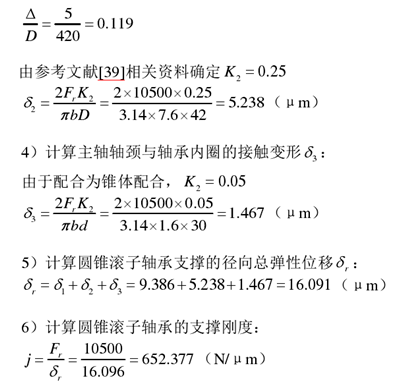
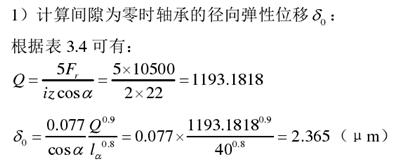
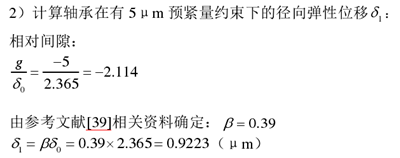
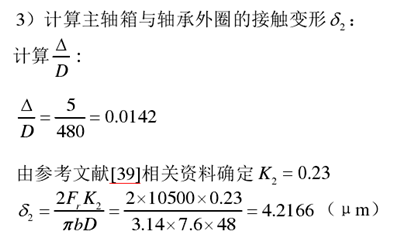
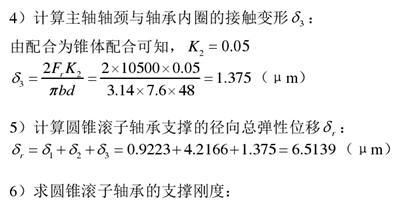
(2)計算圓錐(zhuī)滾(gǔn)子軸承剛度:
下麵分別(bié)計算圓錐滾子軸承和圓柱滾子軸承的支撐剛度,表 3.6 列出了(le)本文支撐主軸所(suǒ)選用的單列圓錐滾子軸承 HR2-32960-P5 各項參數。
表3.6 圓錐滾子軸承具體(tǐ)參數
(3)計(jì)算圓柱滾子軸承支撐剛度:
表 3.7 列出了 NNU4064KM/W33-P5 型雙列(liè)圓柱滾子軸承的各項參數。
表3.7 圓柱滾子軸承具(jù)體參數
3.4.4 考慮軸(zhóu)承支撐剛(gāng)度的模態分析
主軸的振(zhèn)動可以看成是每(měi)階振型的線性組合,其結構(gòu)為(wéi)連續體,因此理論上主軸存在無數階固有頻率,但在實際加(jiā)工(gōng)過(guò)程中低階固有頻率(lǜ)對軸的振動(dòng)影響要比(bǐ)高階固有頻率大,因此低階頻率(lǜ)對軸的動態特性起(qǐ)決定作用[40,41]。表 3.8 是應用有限元分析軟件計算出的主軸在軸承約束條件下的(de)前六階固有(yǒu)頻率及振型,圖 3.9 為(wéi)前六階的陣型圖。
表 3.8 彈性約束的主軸前六階固有頻率和振型

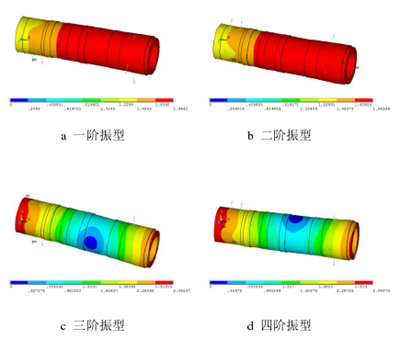
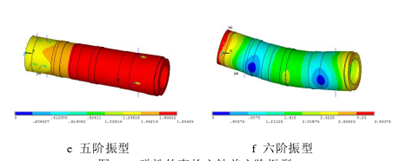
圖3.12 彈性約束的主(zhǔ)軸前六階(jiē)振(zhèn)型(xíng)
從主軸的固有頻率表和振型圖可以得(dé)出,主軸的一(yī)階、二階固有頻率相同,三階、四階固有(yǒu)頻率相近,並且其振型(xíng)表現為正交,因此可將其視為複根。主軸的第一階模態表現為主軸的垂直方(fāng)向(Y 向)上的(de)一階彎曲振動(dòng),且最大形變量為 1.84mm;第二階模態表現為主軸橫向水平方向(Z 向)的(de)一階彎曲振動,且一、二(èr)階(jiē)最大彎曲變形發生在主軸的中部,最大(dà)形變量為 1.84mm;第三階模(mó)態表現為主軸垂直方向(Y 向)的二階擺動彎曲振動;第(dì)四階模(mó)態表現為主軸的橫向水平方向(Z 向)的(de)二階擺動(dòng)彎曲振動,且三、四階最大彎曲變形均發生在主軸兩端;第五階模態表現為扭轉;第(dì)六階模態表(biǎo)現為主軸的垂直方向(Y 向)上的三階彎曲振動,最大變形發生在(zài)主軸左端。
3.5 主軸臨界轉速分析
主軸回轉工作時(shí),有時主軸的撓度會迅速增加,並且主軸轉動發生波動,此時主軸的轉速即為臨界轉速[42]。主軸工作時的轉速應盡量避免接(jiē)近臨界(jiè)轉速,從而避免發生共振情況。通過(guò)比較臨界轉速與主軸工作轉速,可以判斷主軸(zhóu)係(xì)統是否發(fā)生共振,轉速和頻率的關係如式(3.3)所示:

表3.9 主軸前(qián)六(liù)階固有頻率的臨界轉速(sù)
3.6 主軸的諧響應分析
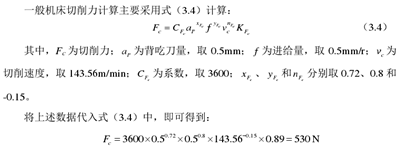
3.6.1 主軸切削力計算
在主(zhǔ)軸回轉運動過程中,受到來自外部載荷的激振作(zuò)用,同(tóng)時由於自身(shēn)做回(huí)轉運動,所以(yǐ)會受到(dào)外部激振力的周期性激振作用。主軸(zhóu)受到的外部載(zǎi)荷主要來自機床刀具切削工件時的切(qiē)削力作用,研究切削力對主軸(zhóu)的動態響應問題至關重要,下(xià)麵就對本課(kè)題主軸受到的切(qiē)削力進行計算,為研究主軸的動態響應問(wèn)題做鋪墊。
3.6.2 主軸諧響應分析
在機床加工過程中,主軸會受到外部力周期激振作用,當主軸的固有頻率與激振頻率相等(děng)時就會發生共振現象,不但會降低機床(chuáng)的加工精度,同時還會損害加工刀具和機床本身[43]。因此(cǐ),研究結構的動態響(xiǎng)應是動力學分析問題中至關重要的內容。諧響應分析是以模態分析為基礎,主要研究當外載荷為隨時間變化而呈現簡諧變化作用在線性結構上時,結構有何穩態響應[44]。本文采用模(mó)態疊加法,將模態分析結(jié)果中得(dé)到的各階振型分別乘以對應係數,之後求和求解動力學響應(yīng)問題。本文(wén)將切(qiē)削(xuē)力作為(wéi)激振力,對主(zhǔ)軸施加 530N 的激振力,加載在主軸前端軸承支撐(chēng)中點處,頻率範圍(wéi)為頻率範圍為 0-2000Hz,研究主軸徑(jìng)向方(fāng)向(xiàng)的(de)動態響應情況,圖 3.13 為得到(dào)的幅頻曲線圖。 3.13圖(tú)3.13 主軸前端幅頻曲線圖
從圖 3.13 中可以看出,當(dāng)激振頻率在 465Hz 附近和 689Hz 附近時,主軸(zhóu)的徑向位移出現峰值,且在 689Hz 附近時峰值最(zuì)大,此時主軸的動剛(gāng)度最小,當激振頻率在 0至(zhì) 400Hz、620Hz 附近(jìn)及大於 800Hz 時,主軸的徑向位移均很小,說明在這些頻率範圍內主(zhǔ)軸由(yóu)較好的動剛度。
3.7 本章小結
本章介紹了該主軸係(xì)統的具體結構,對其進行了(le)簡化處理。利(lì)用三(sān)維建模軟件進行實體建模,並導入有限元(yuán)分析(xī)軟件進(jìn)行網格劃分,之(zhī)後進行分(fèn)析。先(xiān)對主(zhǔ)軸(zhóu)進行了自由(yóu)狀態下的模(mó)態分析,得到(dào)了主軸的固有頻率及振型。再考慮主軸在約束條件下的動態特(tè)性,介紹了結合麵的處理方(fāng)法,並具體模擬了軸承對(duì)主軸支撐結合麵的限製(zhì)情況,利用數學方法計算(suàn)得(dé)到了支撐軸承(chéng)的具體剛度,對主軸進(jìn)行模態(tài)分析,得(dé)到了(le)在考慮軸承支撐剛(gāng)度約束條件下的(de)主軸(zhóu)振動頻率,並將振動頻率與主軸的極(jí)限轉速作對比分(fèn)析,了解到主軸振動頻率遠遠低於其共振區域。最後分析(xī)了主軸的動態響應(yīng)特性,為後麵對主軸(zhóu)進一步優化設計打下理論基礎。
投稿箱:
如果您有機床行(háng)業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行(háng)業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多(duō)本專題新聞
名企推薦






馬")
專題點擊前十
| 更多

