
鼓形齒輪是一(yī)種廣泛用於齒式聯軸器、齒式接軸等基礎件中的(de)重要零件。加(jiā)工這種齒輪,除了可用較昂貴的數控(kòng)滾齒機外, 許多廠家都采用在普通滾(gǔn)齒機上安裝(zhuāng)仿形板並手搖機床立柱來實(shí)現。這種方法存在立柱進給靈敏度差、工件齒麵粗糙度(dù)高、仿形板規(guī)格繁多、操作費精力等弊(bì)端, 特別是工件尺寸愈大, 弊端愈突出。
隨著數控技術的發展, 近10 年來部分高校和廠家開始探索數控改造普通滾齒機加工鼓形齒輪, 為這一問題的解決開辟了新的途徑。
1.基本原理
根(gēn)據鼓形齒輪的成(chéng)形原理, 在普通滾齒機原分齒傳動鏈的基礎(chǔ)上, 按照數控理論中兩坐(zuò)標(biāo)圓弧插補原(yuán)理, 對機床(chuáng)的刀架垂直進給(gěi)和立柱水平進給(gěi)進行微(wēi)機控製改造(zào), 實現鼓形齒輪加工。
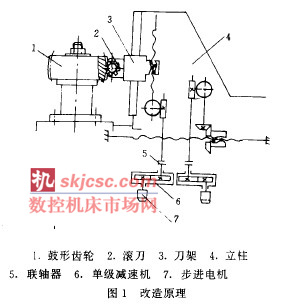
Y 38 A 最大加工直徑為小s o o m m , 最大滾(gǔn)切模數為(wéi)m 6 , 滾刀轉速為4 7. 5 ~ 1 9 2 r / m in , 刀架垂直進給量為0. 25 ~ 3. o m m / r 。工件模數為(wéi)m Z ~ m 6 , 直(zhí)徑一般不超過爭5 5 o m m , 齒(chǐ)根母線輪廓度允差為士0. 03 ~ 士0. l om m , 對稱度允差為1 ~3 m m。按工件精度和切削力(lì)的計算一, 參考國內外數控滾齒機的拖動方式, 采用(yòng)步進電機驅動的(de)開環伺服係(xì)統。改造原理如圖1 所示。
綜合考(kǎo)慮滾切中對機械進(jìn)給係統跟隨性、快速性的要求及改造成本等因素, 係統的主要(yào)參(cān)數定為: (l) 係統脈衝當量δp. 0.05 m m /s t e p ; (2 ) 步進電機(jī)步距角φ=1. 5 ° ; (3 ) 起動時間常數r=25 m s ; (4) 空載快速移動Vr =0. 8m / m in 。
2.機械改造
數控機床的進給係統應滿足無間隙、低(dī)摩擦、高剛度、高諧振(zhèn)等基本要求。由此可知, 需要完成的機械改(gǎi)造主要包括滑動絲杠改滾珠絲杠、蝸杆一(yī)蝸輪副改為雙導(dǎo)程漸開(kāi)線蝸杆一斜齒輪(lún)副和傘齒輪副中增加軸向調整環節、滑動軸承均改為滾動軸承、增(zēng)加兩個(gè)單級減速機, 滿足係統脈衝當量。改造後(hòu)的進給係統, 起動力矩(jǔ)小, 傳動(dòng)精度高, 絲杠(gàng)剛度好, 各齒輪(lún)齧合間隙均(jun1)可調整。
通過切削力計算、水平進給計算, 選1 3 o BF 0 01 型反(fǎn)應式步進電機。由啟動矩頻特性可知, 在2 6 6 7H z 下啟動時扭矩不到ZN·m , 不能滿足拖動需要。所以電機驅動采用(yòng)高、低壓功放電路, 並(bìng)設置速度控製子程序(xù), 以避免啟動時產生失步。
3.硬件電路
硬件電路由微機(單板機)、外設(shè)、信號變換電路及輔助電路幾部分組成, 構成一個完整的簡易數控係統, 完成程(chéng)序的輸入(rù)與處理、顯示、電機驅動等一係列功能。
單板機及外設 專用(yòng)單板機主要由微處理器、存儲器、輸入輸出接口及總線等組成,它也可用T B 80 1 改製而成。微(wēi)處理器選用機床改造中常用的8 位芯片(piàn)Z so C PU , 其時鍾頻率為ZM H z ; 存儲器選(xuǎn)用ZK x s 位的6 1 1 6 R A M 2片、ZK x s 位的2 7 1 6 E PR O M 3 片(piàn), 6 1 1 6 用於調試程(chéng)序, 2 7 1 6 用於存放監控(kòng)程序、功能子程序及加工程序; I/ O 接口選用Z s o PIO Z 片, 一片(piàn)用於步進電(diàn)機功放電路聯接(jiē), 另一片用於輔助電路(如行程(chéng)控製(zhì)、指示等) 聯接; 內存(cún)譯碼器和1/ 0 譯碼器均選用74 L S 1 38。
外設主要有28 鍵鍵盤和2 x 6 個7 段數字(zì)管(L E D ) , 6 個數字管中, 第1 位顯示正負號,第2 、3 、4 位顯示整數(shù), 第(dì)5 、6 位顯示小數。
(2 ) 驅動電路步進電機(jī)啟動過程中, 為了使勵磁電流保持一定的上升速度(dù), 保證電(diàn)機具有(yǒu)較大的輸出扭(niǔ)矩。驅動電路采用雙電(diàn)源功放電路, 即在勵磁初(chū)期的短時間內用高電壓驅動, 達到額定(dìng)電流時切換到低電壓。本改造中選用w BQ Z 一0 3 型五相步進電機驅動電源,其高壓驅動電路由預置放大、微分電路、前置放大、高壓功放組成, 低壓驅動電路由預置放大、射極輸出器(qì)、低(dī)壓功放組成。為了防止強電及幹擾信號通過(guò)1/ 0 回(huí)路進入微機而(ér)影響正常工作, 在1/ 0 接口與驅動電路、輔助電路之間均設有G O 1 01 三極管(guǎn)光隔離器, 以阻斷幹擾信號的傳導。
4.軟(ruǎn)件設計
整個軟件係統采用模塊化設計, 它包括主程序模塊、子程(chéng)序模塊及(jí)加工程序模(mó)塊(kuài)三大部分。主程序中有監控程序和初始化程序, 前者包括L E D 顯示管理程序、鍵盤管理程序、二進製與十進製轉換程序等, 後者包括PI O 初始化、C T C 初始化、鍵盤和L E D 緩衝區初始化(huà)及標誌位初始化程序等。子(zǐ)程序包括中斷(duàn)子程序、行程控製子程序及報(bào)警子程序等(děng)。
加工程序按被加工零件的(de)加工工藝編製,這裏包括圓弧插補程序、環形分配子程序及延時子程序等。
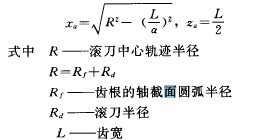
( 1 ) 插補計算滾切鼓形齒時, 滾(gǔn)刀中心的運動軌跡為半徑R 的圓弧(hú)
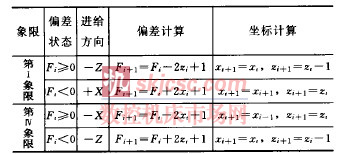
運用逐(zhú)點比較法, 可(kě)計算出滾刀中心軌跡I 和N象限中的圓弧插補值, 其結果如下表:
(2)電機控製與加工程序框圖步進(jìn)電機用內存中(zhōng)的控製字F CW 控製運行狀態。在8位(wèi)FCW 中, D 。和D Z 分別為X 向和Z 向的轉動與停止控製(zhì)位, D l 和D 3 分(fèn)別為(wéi)X 向和Z 向的方向控製位。
電(diàn)機通電方式為(wéi)五相五拍, 采用軟件環形(xíng)分配器(qì)實現, 通電狀態用I/ O 口的(de)輸出數據控製, 即一個輸出(chū)數(shù)據對應一種(zhǒng)通(tōng)電(diàn)狀態。欲使電機正向連續轉動, 1/ 0 口循環輸出01 H →o ZH → o 4 H →o 8 H →lo H →o 1 H ⋯ ⋯ 各狀態碼。
欲反向轉動, 狀態碼順序相反。改變各狀態碼之間的間隔時間, 可改變(biàn)電機轉速, 以滿(mǎn)足各種切削進(jìn)給速度。
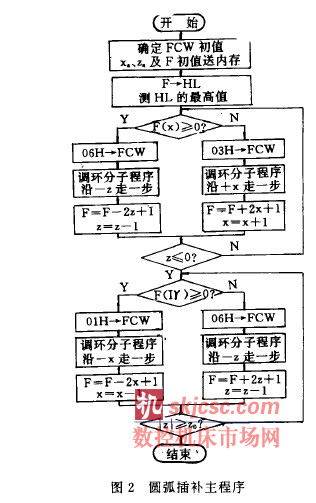
間隔時間由延長子程(chéng)序控製,也可利用C T C 定時器(qì)控製。加工程序中(zhōng)的圓弧插補主程(chéng)序框圖如圖2 所示。
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯(lián)係本網編(biān)輯(jí)部, 郵箱:skjcsc@vip.sina.com






州金馬")

