
局(jú)部坐標係最小二乘法(fǎ)擬合曲線圓心在一些大型、高精度(dù)箱體類零件的孔係加工中,對於孔的(de)形位公差的測(cè)量是一個決定生產質(zhì)量和效率的關鍵(jiàn)環節。但在目前實(shí)際生產中所(suǒ)采用的各種方法,手工檢測精度和效率較(jiào)低(dī); 三(sān)坐標檢測本身測量精度很高,但離線測量不但(dàn)帶來很(hěn)大的定位基準(zhǔn)誤差(chà),且對工件的修正加(jiā)工帶來困難,多次裝夾工件還增加(jiā)了工作強度; 而利用加(jiā)工中心(xīn)機床本身的功能,在線測量不僅(jǐn)能更好(hǎo)地滿足工件檢測精度要求,對提高生產質量和生產效率,減輕(qīng)勞動強(qiáng)度都有著很高的(de)應(yīng)用價值。本文針對高精度箱體上相交斜孔(kǒng)位置度在線自動檢測問題進行了研究,提出了開發設計的思路和方法(fǎ),並對係統測量宏程序的編製進行了深入的(de)分析和研討,通過(guò)箱體相交(jiāo)斜孔的(de)生產實例,編(biān)製了檢測宏程序。同(tóng)時,對係統的組(zǔ)成(chéng)原理、工藝性(xìng)、檢測精度、安全性以及數據處理等作了必要的論述。
1 基本組成和(hé)工(gōng)作原理
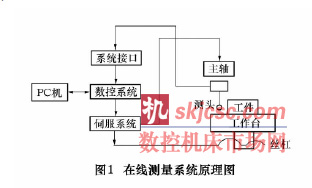
五軸加工中心在線自動測量係統包括加工中心、計(jì)算(suàn)機、測頭係統(tǒng)和工件。接觸式測頭(tóu)像普通刀具一樣(yàng)安(ān)裝在加工中心刀庫中,可由程序(xù)控製實現(xiàn)自(zì)動調(diào)出並安裝在主(zhǔ)軸上,測頭就相當於一個重複精度很高的觸點開關。其工作原理(lǐ)如圖1 所示,首先在計算機上生成自動測量(liàng)宏程序,並將測量宏(hóng)程序(xù)由RS232 通信接口傳輸(shū)給機床數(shù)控係統,數控係統將程序處理後,發(fā)出控製指令,從而使機床伺服(fú)係統驅動工作部件,利用加工中心係統本身的傳動機構控製測頭向測量點運動,當測球以(yǐ)一定的速度接觸工件時,測頭被(bèi)觸發,測頭內部觸點脫開,觸發信號(hào)傳到(dào)轉換器,轉(zhuǎn)換器發出短暫的蜂鳴聲,並通過測頭與數控係統的專用接口轉(zhuǎn)變成數控係統可識別的信號,該點瞬時的機(jī)床坐標由運(yùn)行的(de)程序讀(dú)出並記入相應的變(biàn)量中。信(xìn)號接受後,加工中心立即停止運動。測頭允(yǔn)許一定的超程,但(dàn)測頭的運動速度不(bú)能過高,以(yǐ)免損壞,必須用跳步指令來實現測量工進動作( 如FANUC 0mc 係統的跳步指令為G31) 。當測頭離開工件時,發出第2 次蜂鳴聲,測杆複(fù)位。
在計算機軟件係(xì)統控(kòng)製下,可對係統測量結果進行(háng)計算、補償、數據庫鏈接及可視化等各項數據處理工(gōng)作,直至完成全部測量工作。
2 測量宏程序及其編製
測量宏程序是加工中心在線測量的依據(jù),是使測頭按照一定速度和特定路線執行測量任務的命令集(jí)。
在編製某個工件測(cè)量宏程序時,首先要製定工件的(de)檢測工藝方案,並(bìng)根據所使(shǐ)用的五軸加工中心規定的(de)指令代碼及程序格式(shì),將(jiāng)工件的檢測元素、幾何參數、測頭運動路徑規劃(huá)以及其他輔助動作編(biān)製成工件檢測程序單,再將程序單輸送給數(shù)控係統(tǒng),從而指(zhǐ)揮加工中心(xīn)實現檢測功能。工件結構形(xíng)狀、精度要求不同,檢測程序及參數也不同。
測量(liàng)宏程序的編製應注(zhù)意以下幾個問題:
( 1) 由於測頭(tóu)和機床類型的(de)不同組合,為(wéi)實現不同測量功能的宏程序的編製(zhì)也不盡相同,編程者要對不同組合的係(xì)統進行分析和比較。
( 2) 要明確測量對象是序(xù)前、序中還是序後測量。序前測量由於被測要素的位置坐(zuò)標不明確,需要手動引導測頭進入測量區。而序中和序後測量,由於有準確的測量位置坐標,可通過程序實現自動測量。
( 3) 明確被測對象的幾何要素特征,選定相應的測量方法,包括(kuò)測量速度、測(cè)點(diǎn)數、測點(diǎn)分布(bù)、測頭接觸方式及測量路徑規劃等。
( 4) 因為是利用機床在線測量,機床要完(wán)成的加工工序比較(jiào)多(duō),對局部變(biàn)量( #1 ~ #33) 、公共(gòng)變量( #100 ~ #149,#500 ~ #531) 的(de)使用(yòng)應先進(jìn)行設計安排並(bìng)作出規劃表,以使工件加工和測(cè)量(liàng)中信息參數不至於因為地址重疊而發生數據混亂。從實現角度講,編製測量(liàng)宏程序最關鍵的問題是對宏變量的操作。宏程序中用係統變量保存模態(tài)信息變量,如記錄刀(dāo)具偏置值、工件偏置值和(hé)坐(zuò)標值等。公(gōng)共變量是各(gè)子宏程序之(zhī)間共同使用的變量,它們用來(lái)保存標定信(xìn)息或(huò)坐標轉換信息。與公共變量相反,各子宏程(chéng)序的局部變量相(xiàng)互獨立(lì),其有效範圍(wéi)隻局(jú)限在本程序。通過局部變量可實現數據交換、條件判斷等功能。
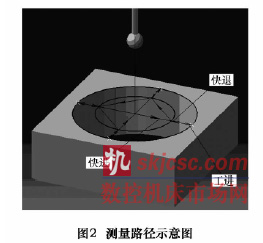
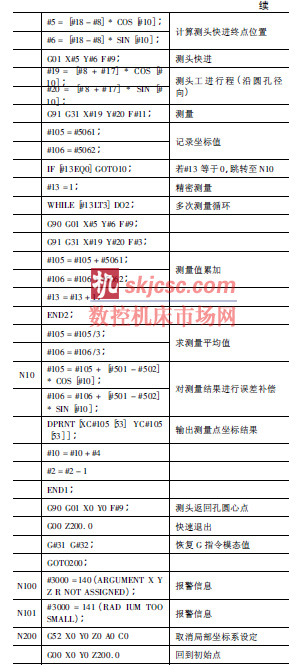
( 5) 測量(liàng)路(lù)徑的快速性、精確性和安全性是編製測量宏程序的關鍵。測頭的運動(dòng)速度包括定位速度和接近速度,即測量動作是由一個個定(dìng)位動作、接(jiē)近動作、接觸動作和後退動(dòng)作組合而成,如圖2 所示求高精度(dù)甚至精密檢測(cè)情況下,測量動作需要重複進行,以消(xiāo)除在線測量(liàng)係統中各種可能的隨機誤差因素。係統記錄每次測量的坐標值,並進行多次累加求出測點坐標平均值。如果采用多次碰撞重(chóng)複測量,並合理安排定位動作、接近動作(zuò)、接觸動作和後退工作的點坐標位置(zhì)和運動速度,即可保證測量的精度和速度。本係統中(zhōng)精密測量選項即是指重複測量求取平均值。測量路徑的安全性是指測量過(guò)程中工件和測頭的安(ān)全(quán)性,既要避免測頭對工件的擦(cā)傷,又要避免工(gōng)件或夾具對測頭的超程撞擊。
對(duì)本係統來說,測量路(lù)徑的安全性(xìng)應遵循以下原則:
( 1) G31 指令程序段的下(xià)一段要用反向運動指令,這樣可有效地避免測頭的超程撞擊。
( 2) 要避免(miǎn)相鄰程序段連(lián)續(xù)使用G31,以免產生超程撞擊以致損(sǔn)壞測頭或工件。
( 3) 測頭尋找工件時用G31 指令並(bìng)使用較小的進給(gěi)速度,絕對不允許使用G00 或G01。
( 4) 對異形(xíng)件的測(cè)量,要充分考慮到中間障礙(ài)物的高(gāo)度、大小問題。
( 5) 多使用一些工藝性的防止碰撞的(de)程序段(duàn)。
3 測量宏程序實例
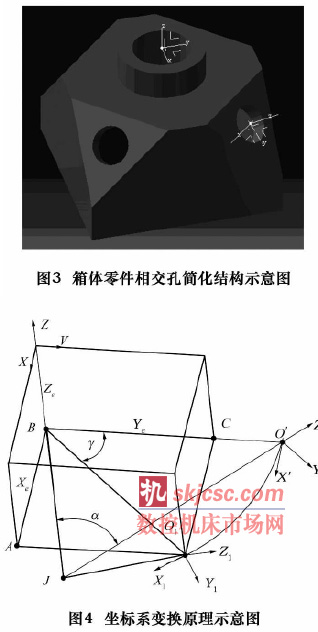
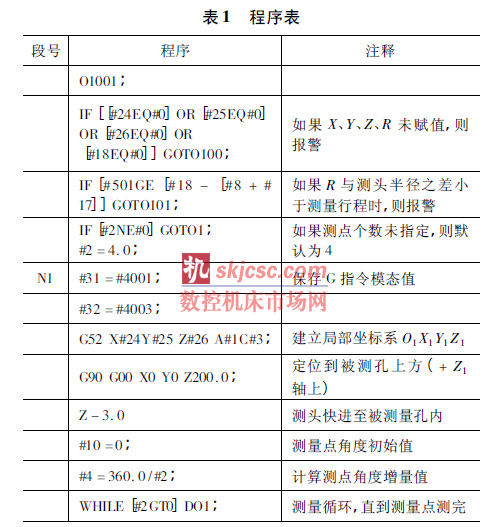
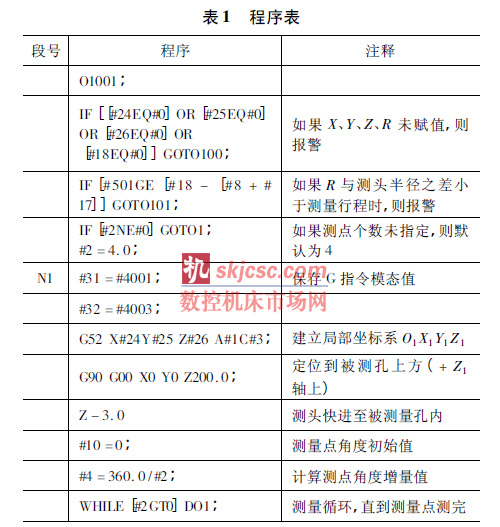
圖(tú)3 為某箱體零件相交孔部分簡化(huà)結構示(shì)意圖。設(shè)計要求零件上(shàng)表麵(miàn)的垂直孔與斜側麵上的相交孔有較高的位置度。由(yóu)於箱體較大,移(yí)動及安裝定位不(bú)易,所以采用(yòng)在線測量的方式進行(háng)檢驗。以零件上表麵(miàn)垂直孔作為基準(zhǔn)孔,這樣可以消除零件安裝誤差對測量精度的影響。對每一被測孔通過坐標係變換,設定局部坐標(biāo)係,保證主軸軸線與(yǔ)孔軸線平行,局(jú)部坐標係的原點即為被測孔的位置理論點(diǎn)。坐標變換的原理如圖4 所示,先將原(yuán)坐標係平移至被(bèi)測孔(kǒng)中心(xīn)O1 ( xe,ye, ze) ,X 軸保持水平,坐標係繞X 軸旋轉α 角度,再繞Z軸旋轉γ 角度,便得到被測孔的(de)局部坐標係O1 X1 Y1Z1。測量主程序調(diào)用格式如下:
G65 P1001 X Y Z A C R M F HE Q B;
參數說明: X( #24) 、Y( #25) 、Z( #26) 為被測孔端麵中心坐標值; A( #1) 、C( #3) 為被測孔局(jú)部坐標係繞X、Z 軸轉(zhuǎn)角; R( #18) 為被測孔半徑(jìng); M( #13) 為標準測量( 0) 和精密測量( 1) 的選項; F( #9) 為(wéi)測頭快進速度; H( #11) 為測頭慢進( 工進) 速度; E( #8) 為測頭慢(màn)進和後退距離,一(yī)般(bān)應大於3. 0 mm; Q( #17) 為測頭探測超程距離,取值在2. 0 mm 左右; B( #2) 為需要的測點個數。
測量宏程序見表1。
4 測量數據的處理
以(yǐ)上宏程序測得的數據就是在局部坐標(biāo)係中被測孔圓周(zhōu)上的一係列點( xi,yi) ,根據測量數據采用最小二乘法得到擬合曲線圓方程,進而得到擬合(hé)曲線圓(yuán)心坐標( x1,y1) ,如圖5 所示,這項工作可以通過計算機專用程序軟件完成。z1坐標的測量可(kě)通過測頭垂直於孔口端麵接(jiē)觸工件(jiàn)來獲(huò)得,便得到被測孔的位置坐標Om ( x1、y1、z1) 。孔的理論位置為(wéi)O1 ( 0,0,0) ,於是,被測孔的(de)位置度誤差為

5 結語
在線自動(dòng)測量技術(shù)是一(yī)項先進、高效、精(jīng)確的檢測技術,尤其適應於高精度大型箱體類工件及(jí)安裝(zhuāng)定位不太容易的工件,對保證工件加工質量和提高生產效率具有很高的實用價值。本文論述了高精度箱體相交孔係(xì)在線測量係統的組成和(hé)工作原理、測量數據的處理。通(tōng)過(guò)局部坐標係的(de)建立,簡化了測(cè)量(liàng)工作。對於(yú)測(cè)量係統研發的重點工作即測量宏程(chéng)序的編(biān)製(zhì)原則、工藝方案(àn)以及測量的快速性、精確性、安全性作了重點的分析和討論,並以實際案例來說明宏程(chéng)序(xù)的編製方
法。
如果您有機床(chuáng)行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com








