
基於剛體動(dòng)力學的五軸數控機床模擬係統研(yán)究
2016-8-1 來源:天(tiān)津職業技術師範大學(xué) 作者(zhě):嶽剛
把操作者手工編寫或通過(guò)軟件自動編寫的工件加工程序,翻譯(yì)成運動控製卡可(kě)以識別的刀具路徑軌跡,是數控係統的主要工作之一。這個識別過程實際上(shàng)是將工(gōng)件加工程序(xù)中(zhōng)工件坐(zuò)標係中的刀具路徑軌跡經過一定的計算[20],轉變成為機床(chuáng)坐標係中的刀具(jù)路徑軌跡。所以必須(xū)正確的對刀具路(lù)徑軌跡進行運動求解計算才能實現該過程。五軸數控機床通過在三個(gè)線性軸運動的基礎之上增加了兩個回轉軸的運動(dòng)[21],其運動的複雜性也相應的增加,對於編程人(rén)員和(hé)機床操作(zuò)人員來講,增加了一定的難度。對五軸(zhóu)數控機床進行正確(què)的(de)運動求解,有利於深(shēn)入掌握(wò)它的運動規律,最大程度地發揮其(qí)在加工中高效(xiào)、高精等優勢。
從數學的角(jiǎo)度(dù)講(jiǎng),物體運動求解的本質就是三維(wéi)圖形的線性變換,其中包括基礎線性變換,諸如平移(yí)變換(huàn)、旋轉變換等。當前國內外相關行(háng)業的研發人員已開始對適合(hé)五軸數控(kòng)機床進行分析的通用算法的探究,不過目前針對五軸數控(kòng)機(jī)床的運動分析大多是在(zài)假定機床所有移動軸一(yī)一正交等限製條件下進行的[22],並且(qiě)也沒有考慮機床本身的製造精度。所(suǒ)以(yǐ),綜合考慮多因子的(de)五軸數控機床運動分析理(lǐ)論(lùn)的探究是今後五軸數控機床運動學探究最主要的領域之(zhī)一。
本章在描述了運動分析時所必須借助的基礎線性代數原理,分別例舉了采用三種(zhǒng)非常普遍的構成形式的(de)五軸數控機床在一定的限製條件下(xià)的運動分析算法。因為機床的製造精度與安裝精度有一定限製,故對(duì)於五軸數控機床進行運動分析還需要結合機床自身具有的許多誤差,來修正這些誤(wù)差對工件切削精度的影響。
3.1 運(yùn)動分析
在三維空間中,任何物體的運動方式都可以概括(kuò)為(wéi)幾何體的平(píng)移、旋轉等許多基礎的線(xiàn)性變換[23]。從線性代(dài)數的角度(dù)講,這些變換全部可以看做幾何體(tǐ)的幾(jǐ)何(hé)變換,因此又把(bǎ)幾何體的線性變換稱(chēng)為幾何變換,上述(shù)的變換能夠通過線性(xìng)代數中(zhōng)的矩陣乘法來完成。

3.1.1 平移變換
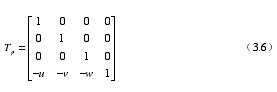
幾何體在三維(wéi)空間從一個坐標點沿著任意直線運動到另(lìng)一個坐標點的過程叫做(zuò)平移(yí)變換[23],在整個變換中不會使幾何體的外形和尺寸發生變化。對應的齊(qí)次方程為:

假定空(kōng)間幾何體的起始位置為(x,y,z),在(zài)整(zhěng)個運動過程中,幾何體(tǐ)沿(yán)著 X、Y、Z 三個(gè)方向(xiàng)各運動(dòng)了 u、v、w 個單位長度,運動結束後,新(xīn)的位置(zhì)為(X、Y、Z),那麽該幾(jǐ)何體的位置變換對應的方程為:

3.1.2 旋轉變換
所謂旋轉(zhuǎn)變換,就是讓某個物體繞著 X、Y、Z 三個軸中的一個(gè)軸旋轉一(yī)個角度。此時,可以利用(yòng)右手螺旋法則來判斷轉角的正負[24][36]。(1)圍繞 X 軸轉(zhuǎn)動,X 方向(xiàng)坐標不發生變(biàn)化(huà),隻有 Y、Z 兩個方向坐標發生變化。對應(yīng)的方程為:
(2)圍(wéi)繞(rào) Y 軸轉動,Y 方向坐標不發生變化,隻有 Z、X 兩個(gè)方向坐標發生變化。對應(yīng)的方程為(wéi):
(3)圍繞 Z 軸轉動,Z 方向(xiàng)坐(zuò)標(biāo)不發生變化,隻有 X、Y 兩個方(fāng)向坐標發生變化。對應的方程為:
3.1.2.1 圍繞過(0,0)點的任意直線的旋轉變換
直線 OD 是給定三維坐標係中過(0,0)點的任意直線,點 F 是坐標係中任一不在直線OD 上的點,若點 F 圍繞直線(xiàn) OD 轉動後與 G 點重合,那麽相應旋轉變換的計(jì)算方(fāng)法為[25]:
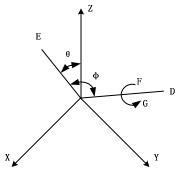
圖3-1 繞過坐標原(yuán)點直線的旋轉
(1)令直線 OD圍繞 X 軸轉動轉角後與麵 XOZ 重合,新的直線成為 OE。這個變換能夠用式 3-3 來完(wán)成。
(2)令直線 OE 圍繞 Y 軸轉動轉角 θ 後與 z軸重合,這個變換能夠用式 3-4 來(lái)完成。
(3)使用式(shì) 3-5 令點 P 圍繞 Z 軸轉動轉角 α。
(4)運算和(2)中互逆,也就是令直線 OE 圍繞 Y 軸旋轉轉角-θ,即(jí)使用式 3-4 的互逆矩陣來完(wán)成。
(5)運算和(1)中(zhōng)互逆,即使用式 3-3 的互逆矩陣來完成。最後能夠獲得圍繞過(0,0)點的任(rèn)意直(zhí)線 OD 的旋轉(zhuǎn)矩陣1 1R x y z y xT T T T T T= 。
3.1.2.2 圍繞過其他已(yǐ)知點的任一直線的旋轉變(biàn)換
L 是三維空間(jiān)中過點的任一直線,它的方向向量是,那麽空間幾(jǐ)何體圍繞直線 L 轉動轉角的相應轉換能夠分為如下三步:

圖 3-2 繞(rào)過任意點(diǎn) P 直線的旋轉(zhuǎn)變換
(1)通過空間幾何體與直線 L 共(gòng)同進行平(píng)移令點 P 移動到(0,0)點位置,轉換矩陣pT為:
(2)在前一個步驟完成之後,令空間幾何體圍繞 L 轉動轉角α ,對應轉換矩(jǔ)陣是(shì)RT 。
(3)令空間幾何體與 L 共同進行平移變換回到最初坐標,對應轉換矩陣是1PT:

最後,能夠獲得總的轉換(huàn)矩陣:
3.2 常見(jiàn)五軸數控機床的(de)構造模式
從三維幾何的角度講,每一個物體(tǐ)都(dōu)擁有(yǒu)六個獨立的(de)自由度[27]。舉個例子,對於一個工件來說,工件的位置是固定的,所以,對於(yú)工件來說(shuō),主軸就具備了六個獨(dú)立的自由度。在加(jiā)工(gōng)過程中,主軸上的刀具對工件進行切削,這時刀具軸線也就是主軸軸線(xiàn)和工件之(zhī)間(jiān)的距離受到刀具半徑的限製,因而實際上隻有五(wǔ)個自由度可用,理(lǐ)論上講實現五軸聯動就可以完成所有空間複(fù)雜(zá)曲麵的加工[28]。
五軸數控機床(chuáng)通常指擁有五個以上可聯動軸(zhóu)的數控(kòng)機床[29],依據不同的自由度組合方式也就是固定或變相固定哪(nǎ)一個的(de)自由度,理論(lùn)上能夠形成成四種不同的組合,依次為:X、Y、Z 三(sān)個軸方向上的自由度和繞任(rèn)意兩個軸回轉的自(zì)由度組合、任意兩個直線方(fāng)向自由度和三個回轉自由度組合、一個直線方向自由度和四(sì)個回轉自由度組合、五個回(huí)轉自由(yóu)度。但在實際使用過程中,需要考慮機床的綜合性能,特別是加工精度、係統壽命等關鍵要素,所以(yǐ),當前市場上常(cháng)見的五軸數控機床都普遍采用(yòng)第一種方式的自由度組合[30]。依據不同的回轉自由度,還能夠對五軸聯動數控機床進行(háng)細(xì)分,可以分為(wéi)三種,分別是:雙(shuāng)旋(xuán)轉主軸(zhóu)頭式、雙回轉(zhuǎn)工作台式、一回轉工作台(tái)加一旋轉主軸(zhóu)頭式[31]。
(1)雙旋轉主軸頭式
雙旋轉主軸頭式的五軸聯動數控機床示意圖(tú)如圖 3-1 所示。從圖(tú)中能夠發現,機床的(de)兩個回轉自由度全部布置在主軸上,使得刀具能夠前後左右(yòu)進行擺動,這樣理論上可以使刀具繞中心點轉動(dòng)到任意位姿[32],對於此類機床,其(qí)工作台無需進行轉動,因此工作台的大小不(bú)受約束,允許設計者設計大型機床。這樣的布置形式的特點在於機床整體承載性能大大增強[33],同時加(jiā)工空間也基本不受限製,其加工對象為(wéi)大型工件,所以大(dà)型龍門式五軸(zhóu)聯動數控(kòng)機床普遍的采用這種結構。此類機床兩個旋轉軸全部集中到了刀具的上(shàng)部,回(huí)轉軸部分結構緊(jǐn)湊,加工過程靈活;同時缺點也很明顯,因為主軸頭集成的擺動機構與(yǔ)傳動機構過於複(fù)雜,使得整個機床的剛度被大大(dà)降低(dī)。
(2)一回轉(zhuǎn)工作台加一旋轉主軸頭式
這(zhè)種類型的機(jī)床通過在機床的主軸頭上麵加一個回(huí)轉自由度,另外一個回轉自(zì)由度加在工作台上,主要通過加(jiā)載在主軸和工作台上的兩個方向的回(huí)轉自由度,這樣布置的好處就是兩個(gè)回轉軸的軸線方向都是固定不變的(de)[33],其示(shì)意圖如圖3-2 所示。這種結(jié)構的五軸機床,因為兩(liǎng)個方向的(de)回轉運(yùn)動並未集中在一起,所以采用這類布置方式的五軸數(shù)控機床優點是結構簡單、整(zhěng)體剛(gāng)性好,缺點是靈活性不好。由於隻有一個回轉自由度在工作台上,導致整個機床的承載性能(néng)差,並且隻能承(chéng)擔的尺寸相對較小的加(jiā)工任務,通(tōng)常用來進行中等(děng)尺寸工件的(de)切削。
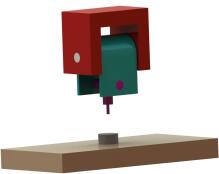
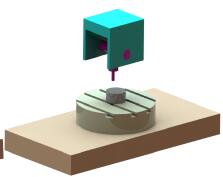
圖3 -1雙旋轉主軸頭(tóu)結構五(wǔ)軸(zhóu)機床 圖(tú)3 - 2一擺動頭(tóu)和一回轉台結構五軸機床
(3)雙回轉工作台式
這種類型的五軸聯動數控機床(圖3-3)是由工(gōng)作台承擔兩個回轉自由度的,因為主軸和工作台的(de)運動是相對的,所以不論旋轉自由度布置(zhì)在主軸上還是(shì)布置在工作台上,都能達到同樣的加(jiā)工效果從傳動鏈的先後順序(xù)能夠知道,采用這種布置方式的(de)機床的(de)兩個旋轉軸有一個是定軸另(lìng)一個是動軸(zhóu)。定軸就是指遠離(lí)工件的隻具備一個旋轉自由度的軸[34],這個軸圍繞的軸線(xiàn)方向在加工過程中(zhōng)是不會改變(biàn)的;動軸是指跟著加工工件(jiàn)一同擺動的旋轉軸,其所圍繞的旋轉軸線方向跟著(zhe)一個定軸的運動而旋轉。采用這種(zhǒng)布(bù)置(zhì)方式的機床承載性能最(zuì)差,加(jiā)工(gōng)尺寸範圍最(zuì)小,整個係統剛性(xìng)處於中等水平,通常用於中(zhōng)小尺寸工件的切削加工[35]。
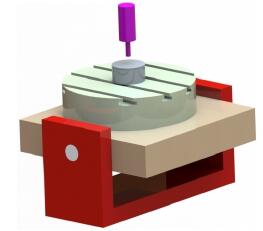
圖(tú)3-3雙回轉(zhuǎn)工作台結構五軸(zhóu)機床
綜上所述,無論五軸機床采用哪種(zhǒng)布(bù)置方式,都同樣(yàng)可以做到刀具對工(gōng)件的任(rèn)意角度切削。因為機床擁有兩個旋轉自由度,刀具可以在機床結構的限製下的任意空間角(jiǎo)度對工件進行(háng)切削。在相應運動控製算法的支持(chí)下,能夠確保在整個切削過程中,刀具按照最佳的位姿來加(jiā)工,而且可以防止機床發生運動幹涉[36]。所以,五(wǔ)軸聯動(dòng)數控機(jī)床具備三軸、四軸機床所不具備(bèi)的的優越的性能,能完成分任(rèn)務更多(duō),同時精(jīng)度會更高[37]。
重點研發五軸數控(kòng)機床(chuáng)模擬(nǐ)訓練機的意義在於:學習數控係統最好的方式是在實際機床上(shàng)進行(háng)練習,但是這樣需要大量的五軸數控機床(chuáng),這對(duì)於學校來說是不(bú)現實的[38]。五軸數控機(jī)床(chuáng)模擬訓練(liàn)機是國內首創能夠解決數控係統教(jiāo)學問題、數控編程人員學習問題的一個關鍵產品。
3.3 五軸數控機床的運動求解
3.3.1 雙轉台型(xíng)五軸數控機床的運動求解
雙回轉台型五軸數控機床按照(zhào)旋轉軸(zhóu)的不同,能夠具(jù)體(tǐ)分為 AB、BC、AC 三種[39]。因為這三種不(bú)同選擇方式的運動變換計算過程沒(méi)有太大差別,所以在這裏隻探討了最常見的 AC 型組合方(fāng)式的(de)運(yùn)動變(biàn)換計算過程[40]。
傳統三軸數控機床隻具備 X、Y、Z 三個直線方向的自由度[41],所以沒有必要進行其他的分析、數學建模、運算,隻需要將程序中的有關路徑控製方麵的 G 代碼翻譯成 XY、Z 三個軸方向上的運(yùn)動(dòng)量,然後再進行聯合(hé)插補運動,最終就(jiù)能夠驅動三個(gè)運動軸(zhóu)切削工件。五軸(zhóu)數控機床除了擁有 X、Y、Z 三個軸之外還有另外兩個回轉(zhuǎn)軸[42],使得刀具可以相對於工(gōng)件做直線移動和回轉運動,所以在刀路運動計算上,需要六個數據來表(biǎo)達某一瞬時的刀尖點位置及刀具軸線(xiàn)位姿:(X, y , z )表示加工刀尖點的位置,( i , j , k )表示(shì)加工(gōng)刀具軸線的位姿[43]。
在五軸機床中(zhōng),刀具在對工(gōng)件進行切削之(zhī)前,需要嚴格采用五軸機床上的結構形式對其整個運動、切削過程進行運動(dòng)學分析(xī),找出工件坐標係與機床坐標係的聯係,推算出其中的轉換(huàn)矩陣,充分利用這個轉換矩陣[44],能夠精確的轉換某一瞬時的刀尖點(diǎn)位置及刀具軸線位姿為 X、Y、Z 三個軸的移(yí)動(dòng)和 A 、C 兩個(gè)旋轉軸的(de)轉動(dòng),這一點是保證(zhèng)數控程序能夠正確被編譯的基(jī)礎(chǔ)。本節會針對(duì)此(cǐ)推導過程做詳(xiáng)細討論[45]。
如圖 3-4 所示,記工(gōng)件(jiàn)原點坐標係為m m m0X Y Z ,機(jī)床原點坐標係為t t tO X Y Z ,以 A、C兩軸中心線交點作為機床坐標原點[46]。工件原點(diǎn)坐標係m m mO X Y Z 和機床原(yuán)點(diǎn)坐標(biāo)係t t tO X Y Z 共(gòng)享(xiǎng)同一個 Z 軸方向,m t0 O =d 。工作台的回轉(zhuǎn)能夠帶動(dòng)毛坯(pī)進行位姿變換,其(qí)中 A、C 兩軸的轉動範圍分別為 0°≤A≤90°、0°≤C≤3600°。
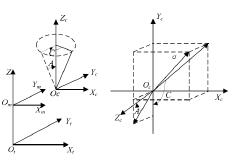

圖 3-4 坐標係 圖3 - 5雙轉台型五軸數控機床坐標係
為了方便以後的計算,需要定義一下計(jì)算過程中用到的坐標係:令零(líng)件坐標係為w w w wO X Y Z ,零件能夠在兩個回轉軸的運(yùn)動中完成圍繞 X 軸轉動轉(zhuǎn)角 A( 0° ≤A ≤90° ),圍繞 Z 軸轉動轉角 C;機床的移動坐(zuò)標(biāo)係為r r r rO X Y Z 。同時,w rO O =d ,如圖 3-5 所示;當前刀具的刀心(xīn)點(diǎn)0C ,其在零件坐標係內的坐標假定(dìng)為(0 0 0, ,C C CX Y Z );當前刀具的軸線假定為α (單位矢(shǐ)量),其在零件坐標係內假定為( , ,)x y zα α α[48]。
在以上設(shè)定的基礎上(shàng),AC 型組合方(fāng)式的運動變(biàn)換計算過程具體如下:
(1)首先將刀具軸線α 移動到經(jīng)過零件坐標係的原點,之後令它圍繞(rào) Z 軸轉動到平麵(-Y)(+Z)內,最後把刀具軸線α 圍繞 X 軸轉動到和 Z 軸重合[49]。以上工作的出(chū)發點是要確保當 0zα ≥ 時,令刀具軸線 α 圍繞 X 軸轉動轉角處於 (90° 0°) 之間,也就是刀(dāo)具相對於(yú)零件圍繞 X 軸轉動轉角(jiǎo)處於(0° 90°) 之間。
(2)將刀具軸線α 的轉動轉化成刀具的旋(xuán)轉或移動:首先讓刀具圍繞 X 軸轉動某個角度 A,再將(jiāng)刀具圍繞五軸機床德(dé)爾(ěr) Z 軸(zhóu)轉動一定角度 C。所以能夠獲得 A 角的運算過程如下:

(3)零件坐標改變後,刀具的中(zhōng)心點0C 坐標值也會發生變化,則機床坐標係內的坐(zuò)標(biāo)值 X、Y、Z 的(de)運算方法為:
1)對零件工件坐標係w w w wO X Y Z 進行移動,使得兩個坐標係的rO 和wO 重合(hé),相應的轉換矩陣是:

2)使零(líng)件圍繞五軸數控機(jī)床的 Z 軸轉動角度 C,對應(yīng)的轉換矩陣是:
3)使零(líng)件圍繞五軸數控機床(chuáng)的 X 軸轉(zhuǎn)動(dòng)一個角度 A,相應轉換矩陣是:
則有:
將上式展開可得:

3.3.2 雙(shuāng)擺頭型五軸數控機床的運動求解
雙(shuāng)擺頭(tóu)型五軸數控機床根據(jù)不同的旋轉軸,可以細分為三種方式[50]。因為(wéi)這(zhè)三種不同選擇方式的運動變換計算過程沒有(yǒu)太大(dà)差別,所以在這裏隻探討了最常見的 X,Y,Z,A,C 組合方式的運動變換計算過程[51]。
首先,初定零件坐標係為w w w wO X Y Z ,假定讓刀具繞 Z 軸旋轉一定角度 C,再讓刀(dāo)具圍繞 X 軸旋(xuán)轉(zhuǎn)一定角度 A(0 ≤A ≤90);假定刀具的轉動中心0hC 至刀心點0C 的空間上的(de)直(zhí)線距離是 L,如圖 3-6 所示。此時,刀心點0C 處在零件坐標係內的位置為0 0 0(, , )C C CX Y Z ,同時,刀具軸線α (單位矢量)在零件坐標係內可用( , , )x y zα α α 來(lái)表示。那麽(me),機床坐標係(xì)內移動變換可以表示為:
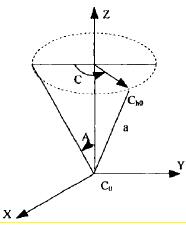
圖 3-6 雙擺頭型五軸數控機床坐(zuò)標係(xì)
A、C 角的計(jì)算過程和前一節裏的計算(suàn)過程並無差別(bié),在(zài)這裏就(jiù)省略了。
刀具中心(xīn)0hC 在刀具旋轉和移動(dòng)後位於零件坐標係(xì)w w w wO X Y Z 內的坐標,就是機床坐(zuò)標(biāo)係下(xià) X,Y,Z 坐標值,其計算過程為:
(1)如圖所示,刀具中心以刀心(xīn)點0hC 為固定點轉動轉角(jiǎo)0C ,圍繞 X 軸轉動轉(zhuǎn)角 A,它(tā)的轉換矩陣是:
(2)刀具中心以刀心點0hC 為固定點轉動轉角0C ,圍繞 Y 軸旋轉轉角 C,它的轉換矩陣是:
(3)經過以上轉換之後,刀具中(zhōng)心(xīn)位於零件坐標內(nèi)的位置能夠通過(guò)下麵的方程來計算:
將上式展開得:
3.3.3 非正交五軸數控(kòng)機床(chuáng)的運動求解
這種運動方(fāng)式的求解與以上(shàng)兩類運動變換相似,計算過程並沒有很大的差別,非正交結構五軸數(shù)控機床的運動可以具體劃分為幾下三(sān)步(bù)進行變換計算[52]:
(1)計算從零件(jiàn)坐標係轉換(huàn)至(zhì)機床坐標係(xì)的位置轉換矩陣。
(2)計算相對於起始(shǐ)點的兩個轉動軸的轉角。
(3)把零(líng)件坐標係內具體的刀位點位置變換成實際機床坐標係中的坐標值[53]。因為(wéi)本文具體討論的是雙轉台正交構造的五軸數(shù)控機床,並且非正交構造五軸數控機床的移動(dòng)變換計算過程相對繁瑣,所以(yǐ)本文不討(tǎo)論。
3.4 本章小結
伴隨著電子計算機科技、數(shù)字控製算法(fǎ)的飛速進步,切削加工工件複雜程度的增(zēng)加等,五軸數控機床在構造構成以及數字控製算法上均(jun1)表現出多樣化的發展態勢[54]。本章(zhāng)首先闡述了平移、旋轉等對機床進行(háng)運動(dòng)求解時必需的一些基本數學理論。接著從結構形加工性(xìng)能等角度,對雙轉台(tái)型、雙擺頭型、擺頭轉台型以及(jí)非正交型五軸數控機床進行了詳細的介紹(shào),並詳細了研究了上述幾種常(cháng)見類型機床的運動求解算法(fǎ)[55]。本章在描述(shù)了運動分析時所(suǒ)必須借助(zhù)的(de)基礎(chǔ)線性代數(shù)原理,分別(bié)例舉了采用三(sān)種非常普遍的構成形式的(de)五軸數控機床在一定的限製條(tiáo)件下的運動分析算(suàn)法[56]。同時,為下一章的進一步研究做了鋪墊,為模擬機訓練係統操作模塊研究奠定了基礎。
投稿箱:
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行資訊(xùn)合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行資訊(xùn)合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
更多本專題新聞
名企推薦






")
專(zhuān)題(tí)點擊前十

