
在(zài)五軸機床的NC 驗證中, 圖形法驗證顯然(rán)無法滿足五軸機(jī)床的複雜性, 這是由(yóu)圖形法驗證(zhèng)方法的(de)簡單性和粗糙性決定的。以布爾運算為特征的實體碰撞和幹涉檢驗方法, 隨著實體複(fù)雜程度的提高(gāo), 布爾運算耗費時間和內存的特點(diǎn)也逐漸(jiàn)顯現出來。加工件逐步成型技術可以很好地仿真材料的切除過程, 但是複雜實體裁剪線段的算(suàn)法實現起來也是困難重(chóng)重。離散點法矢量切割檢驗(yàn)方法(fǎ)[ 6, 9] 用法矢量和刀具掃描體求交的方法進行NC 驗證, 此方法被認為是進行(háng)NC 驗證最精確的方法[10] , 對精度檢驗來說還(hái)是不可替代的方法(fǎ)[ 9] , 可以給出定量的精度信(xìn)息。該方法的(de)難點有兩個: 一是刀具掃描(miáo)體的構造和顯示, 二是射線和曲麵的求交算法。本(běn)文就(jiù)是針(zhēn)對這一NC 驗證算法, 對刀具掃描(miáo)體構造和顯示問題展開研究。
1 五軸刀具掃描體的運動特點
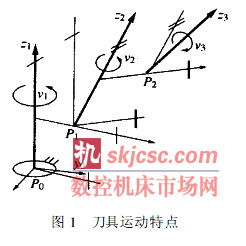
現代數(shù)控機床(chuáng)加工複(fù)雜零件的過程一般如下: 首先(xiān)根據零件(jiàn)圖樣及工藝要求等原始條件計算刀位軌跡, 產生刀位原(yuán)文件, 然後經過後置處理把刀位原文件轉換成指定數控機床能執行(háng)的數(shù)控程序, 驅動相應的執(zhí)行機構進行加工。現(xiàn)代的數控(kòng)加工過程, 在零(líng)件正式(shì)加工之前都要進行NC 驗證。NC 驗證主(zhǔ)要關心的是刀具與零件的相(xiàng)對(duì)位置(zhì)關係, 這種關係或者直接由NC 程序(xù)來約束, 或(huò)者由刀位文件進行約束。由(yóu)於不同的數控係統具有不同的指令集(jí), 由NC程(chéng)序直接(jiē)驅動的加工仿真需要後置處理過程的(de)配合, 對後置處理的研(yán)究超出了本文的研究範圍, 本文(wén)采(cǎi)用刀位文(wén)件來規定刀具與零件之間的相(xiàng)互關係。刀位文件具有一定的格式(shì), 需要一個刀位解釋器對其進行處理, 從中提取出用於(yú)加工(gōng)仿真的刀位軌跡信息。刀(dāo)位軌跡信息主要包括刀心位置和(hé)刀軸方向。五軸機床由於增加了二個擺動軸, 使得刀(dāo)具的(de)刀軸矢量在加工過程中是變化的, 如圖1 所(suǒ)示。
2 刀具掃描體的描述
刀具掃描體就是刀具在加工過程中沿著加工軌跡運動時所掃過的空(kōng)間幾何實(shí)體。有(yǒu)許(xǔ)多文獻介紹過掃描體的生成[1, 2, 11, 12] , 它們的生(shēng)成方(fāng)法均(jun1)建立在微分方(fāng)程的基礎上,用數學方法(fǎ)求得(dé)曲麵包(bāo)絡麵方程, 因而生成的(de)算法比較複雜, 實現比較困(kùn)難, 運算速度較慢。其(qí)中W. P. Wang 和K. K. Wang 的方法具有代表性[ 1, 2] 。
本(běn)文由五軸刀具(jù)掃描體的運(yùn)動特點出發, 把(bǎ)刀具(jù)掃描體看成是每兩個刀位點之間掃描體的連接, 形成一個(gè)完(wán)整的掃描體, 由於(yú)在五軸數控加工中, 一般隻采用直線插補,所以這種(zhǒng)假設是符合經(jīng)過後置處理後(hòu)得到的NC 程序運(yùn)行的實際(jì)情況的(de)。由於在運動過程中刀軸矢量是變化的, 刀具的各個部位掃過的表麵並不是平麵, 球頭刀的刀頭部分掃過(guò)的包絡麵也不是標準(zhǔn)的柱麵。在兩個(gè)連續的刀位點之間的包絡麵應該是一個掃描麵, 這個掃描麵是由(yóu)二維的邊界曲線或者直線沿著空(kōng)間某個方向運動形成的, 在這個運動過程中(zhōng)同時伴隨著回轉動作, 所以形成的包絡麵形狀頗為(wéi)複雜。用常規(guī)的拚合方法(fǎ)難以滿足(zú)造型(xíng)需要。
非均勻有理B 樣條( NURBS ) 技術(shù)的出現, 使得(dé)無論對標準的解析(xī)形狀( 如圓錐曲(qǔ)線、二次曲麵、回轉(zhuǎn)麵等) 還是自由曲線、曲麵都提供了統一的(de)數學表示和統一的表示參數。這解決了實際(jì)應用中大量存在的各種類型曲麵並存, 但是沒有一個有效表示這些曲麵形狀的統(tǒng)一的數學(xué)方法的問題。本文以球頭圓柱刀(dāo)作為研(yán)究對象, 刀具在運動中, 球麵部分(fèn)掃過的曲麵可以看作是一個個的直紋麵銜接而成, 這(zhè)種(zhǒng)直紋麵不能(néng)用一般的體素造型方法很好的(de)表示, 利用非均勻有(yǒu)理B 樣條( NU RBS) 方法可以(yǐ)解決這一問題。但是由於(yú)構造該直紋麵的邊界曲線是一個半(bàn)圓(yuán), 而NURBS 曲線是由控製點來表達的自由曲線, 從它的表達式(shì)不能簡單(dān)地推導半圓(yuán)弧的表示形(xíng)式。因(yīn)此有必要首(shǒu)先研究用NURBS 曲線表示圓弧的方法, 然後才能得出直紋麵的NURBS 表達式。
3 刀具掃(sǎo)描體構造(zào)新方法
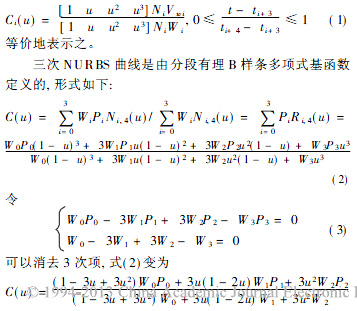
本節首先推(tuī)導刀具的球頭部分形成的掃描麵, 該麵是整個(gè)掃描體構造中最複雜的部分, 其(qí)它部分可以看成(chéng)是(shì)此(cǐ)部分曲麵的簡化, 可以按照此(cǐ)部分曲麵加以(yǐ)推導即可。刀(dāo)頭部分掃描(miáo)麵的邊界曲線(xiàn)是半圓弧, 3 次NURBS曲線能簡便地表示半圓弧, 方法如下:
定理 若已知三次有理Bezier 曲線Ci( u) , 其控製頂點及其權分別為Ui , Ui+ 1, Ui+ 2, Ui+ 3; H i , H i+ 1, H i+ 2, H i+ 3。則它可以用三次NURBS 曲線

由於刀具掃描體(tǐ)可以看(kàn)成是在三維空間經過掃描(miáo)所產生, 所以還必須求出掃描後產生的(de)掃(sǎo)描麵方程, 根據五軸機床刀位軌跡驅動的刀具掃描體的運動特點, 構造出(chū)的掃描麵應該(gāi)是(shì)NU RBS 曲(qǔ)麵, 把每二個刀(dāo)位點之間的運動看成(chéng)是(shì)二維圖形在空間(jiān)沿直線運動和回轉運動(dòng)的結合。
已知空間兩點(diǎn)P 0, P1, 連(lián)接兩點的(de)直線可表示為
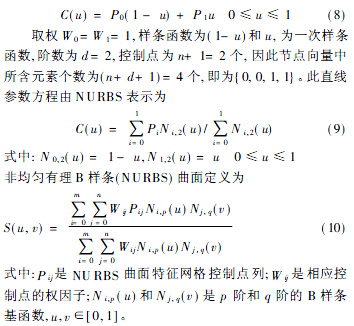
根據上述NURBS 曲麵定義以及半圓(yuán)弧和直線的NU RBS 表示, 我們可以構造出球頭刀具(jù)的球(qiú)頭部分( 球頭也是刀具繞(rào)刀軸形成的包絡麵, 此點請引起注意) 在三維空間掃描形成的掃描體外表(biǎo)麵公式。令


上(shàng)式為一條線段的NURBS 表示式。證明掃描麵是直紋麵。刀具(jù)掃描體的其餘部分包(bāo)括: 起始(shǐ)點(diǎn)的刀具原體, 它們是半球和圓柱體, 可(kě)以(yǐ)用B-rep 來表示(shì)。
3 仿真結果
OpenGL 是(shì)一個工業標(biāo)準的三維計(jì)算機圖形軟件接口, 它的(de)GLU 庫函數提供了一個NURBS接口, 利用上麵推導出的結果, 結合CAD/ CAM 軟件生成(chéng)的刀位文件, 我們用VC 編寫了一個(gè)五(wǔ)軸刀具掃描(miáo)體的仿(fǎng)真(zhēn)軟件, 由圖3 中效果可以看出, 刀具掃描體的表麵(miàn)光滑, 各個離散的(de)掃描體的銜接連續, 能夠(gòu)反應真實的(de)刀具掃描體的包絡麵。

如果您有(yǒu)機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com








