
0 引言(yán)
複雜曲(qǔ)麵和自由曲麵已被(bèi)廣(guǎng)泛(fàn)應用於汽車、航空、船舶、模具等(děng)製造(zào)工業領域。隨著計算(suàn)機輔助(zhù)設計( Computer Aided Desig n, CAD) / 計算機輔助製造(zào)( Computer Aided Manufacturing , CAM) 和計算機數字控製( Computer Numerical Cont rol, CNC)技術的發展, 五軸數控加工已經(jīng)被(bèi)證(zhèng)明是一種高(gāo)效高精度的加工方法。五(wǔ)軸數控加工使曲麵加(jiā)工具有更大的(de)靈活性、更高的效率和更好的加工質量, 然(rán)而刀具方向的不斷變化, 增加了刀具幹涉檢查的難度,尤其是形狀(zhuàng)極其複雜的曲麵。要充分體現五軸數控加工的優勢, 必須解決刀位幹涉問題。
全局幹涉主要指在加工過程中, 刀具整體與工(gōng)件、夾具、機床床身(shēn)等部(bù)件發生的碰撞現(xiàn)象(xiàng), 國(guó)內外學者對此進行了大量研究(jiū)[ 1-12] 。刀具加(jiā)工全局(jú)幹涉檢測算法主要有層次包(bāo)圍盒法、包圍盒法與八叉樹結合的幹(gàn)涉搜索算法、投(tóu)影法、能(néng)量法和凸包法等。
Lee[ 2] 提出采用兩步法進行全局幹涉檢查, 首先利用自由參數曲(qǔ)麵自(zì)身的凸包性粗略判(pàn)斷刀具全(quán)局(jú)幹涉, 當通過自由曲麵的凸包性不能夠成功地檢測出幹涉區域(yù)時, 再在刀具接觸點有效區域範圍內搜索判斷幹涉。鍾建琳[ 3] 依據斜立方體凸包法粗檢刀具(jù)方向與斜立方體凸包之間(jiān)是否存在(zài)幹涉, 若不存在,則該刀具方向可行; 若存在, 則需要進一步的詳(xiáng)細檢測來判斷該空間自(zì)由曲麵與刀具方向是否(fǒu)存在幹涉。楊勇生[ 4] 利用特征投影原理對刀具幹涉進行處(chù)理, 將待檢測的曲麵點投影到刀具體上, 按其投影點與刀具體之間的關係確定是(shì)否存在幹涉。蔡(cài)永(yǒng)林[ 10] 提(tí)出一種求解(jiě)曲麵到刀具(jù)極值(zhí)距離的方(fāng)法, 該方法(fǎ)將曲麵(miàn)上的點投影到刀軸上, 求出曲麵到刀(dāo)軸的最小(xiǎo)距離, 從而判斷刀具的全局幹涉問(wèn)題。以上算法需要求交計算及其距離判斷, 計算量較(jiào)大, 效率(lǜ)相對較低(dī)。
本文針對參考文獻[ 13] 中(zhōng)的刀具軌跡生成算法, 對刀具全局幹涉避免進行研(yán)究, 通過(guò)三維空間坐標係(xì)變換原理將加工曲麵坐標係與刀具局部坐標係進行變換, 並確定刀具姿態有效活動區域, 通過判斷複(fù)雜(zá)曲麵上的檢測點在刀具接觸點軌跡處刀具坐標(biāo)係中的位置來確定是否幹涉, 不需要進行複雜的求交或(huò)者距離計算, 與其他算法相比, 該(gāi)方法大(dà)大減少(shǎo)了計算量, 提高(gāo)了數控加工的整體(tǐ)效率。對所有(yǒu)的幹涉檢(jiǎn)測點在有效切削區域內進行調整, 能夠避免調整刀具姿態時出現(xiàn)二次(cì)幹涉現象。
1 刀具姿態有效區域的確定(dìng)
在五軸數控加工複雜曲麵過(guò)程中, 由於曲麵曲率分布的不規則性, 刀具位於曲麵上的每一個刀觸點都(dōu)有一(yī)個有效擺動區域。當刀具姿態(tài)按其刀觸點法矢量方向進行走刀加工時, 可能出現全局幹涉現象, 需要刀具偏(piān)轉一定角度以避免出現全局(jú)幹涉(shè)。因(yīn)此為了防止在偏轉過(guò)程中(zhōng)出現新的幹涉現象, 需(xū)要防止刀(dāo)具超出有效擺動區域。
為了確定刀具在當(dāng)前刀觸點的有效擺動區域範圍, 首先將曲麵離散成一係(xì)列網(wǎng)格(gé)點, 網格劃分采用(yòng)文獻[ 13] 中的網格形成方法。如果通(tōng)過每一刀具接觸點與所有的網格點所進(jìn)行的(de)距離計算來判斷全局幹涉, 則計算量很大, 因此將網格點相對(duì)於刀具接觸點進行三維(wéi)平移變換。
設刀具接觸點Pc 在(zài)空間坐標係的坐標為( T x , T y , T z ) , 網格點的坐標為( x , y , z ) , 則網格點坐標相對於刀具接觸點進行平移的變換矩陣為
複雜曲麵五軸加工過程中, 使用最(zuì)多的三種刀具如圖1 所示, 它們(men)在計算有效擺動(dòng)區域時的區(qū)別不大, 本文以球頭刀為研究對象。為了縮減判斷刀具有效擺動區域的計算量, 對滿足式( 2) 的網格點進行分析, 確(què)立一個存在幹涉的可能區域, 如圖2所(suǒ)示。
![]()
式中L t 為(wéi)刀具頭總體長度。式( 2) 沒有考慮平移變(biàn)換後zc值的影響, 主要是考慮了刀具在加工過程(chéng)中最大可能的幹涉區域, 避免遺漏幹涉點。
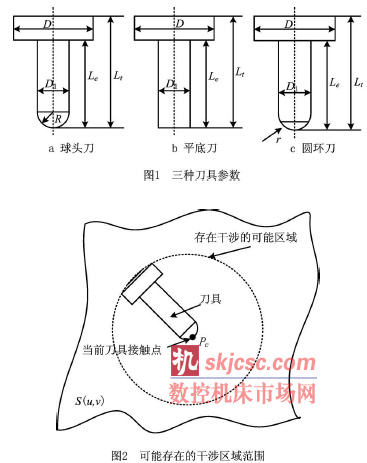
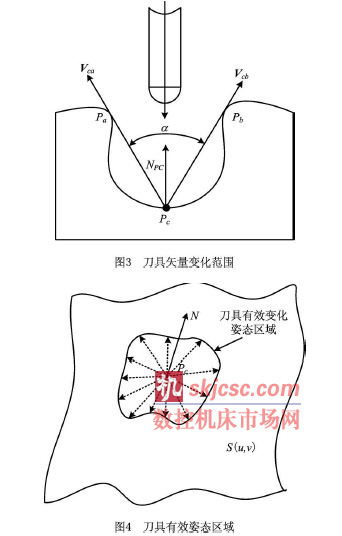
確立可能存在全(quán)局幹涉的(de)區域後, 對區域內的數據(jù)點進行計算, 如圖3 所示。給(gěi)定一個刀(dāo)具接觸點(diǎn)P c , 存在左臨界接觸點P a 和右臨界接(jiē)觸點P b,有(yǒu)P c 點與P a 點確立的向量Vca 和P c 點與P b 點確立的向量Vcb 得到的一個夾角A, 角度A為刀具在當前行無全局幹涉(shè)的活(huó)動範圍, 在此範圍內不存在全局幹涉, 超出此範圍肯定存在全局幹涉(shè)。針對所有區域(yù)內的所有行尋找左右接觸點, 連接所有(yǒu)的臨界接觸點形(xíng)成刀具的有效變化姿態區域, 如圖4 所示。
2 全(quán)局幹涉檢測
為了獲(huò)得最大的加工(gōng)效率, 通常(cháng)利用刀具接觸點的曲麵(miàn)法矢量作為刀具的初始刀(dāo)具(jù)姿態, 由於曲麵曲率分布的不(bú)規則性, 存在(zài)碰刀等全局幹涉現象。目前檢查刀具全(quán)局幹涉(shè)的算法很多, 基本原(yuán)理是通過離散曲麵計算(suàn)曲麵(miàn)點和夾具等到刀具頭之間的距離(lí)判斷刀具是否存在幹涉現象。本(běn)文利用坐標係之間的變換原理檢查全局幹涉, 此方法(fǎ)快速(sù)而簡捷。
21 1 坐標係變換原理
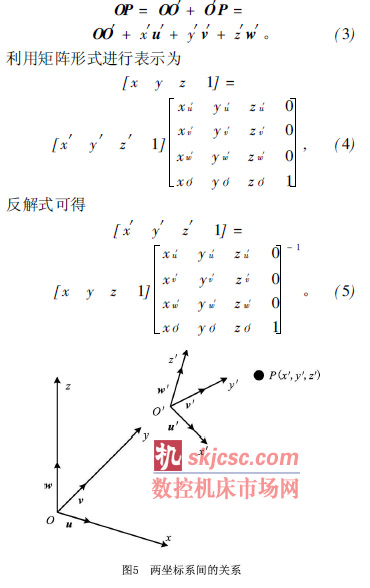
假設點P 在刀具坐標係Ocxcyczc下有坐標( xc, yc, zc) , 三個(gè)坐標(biāo)軸(zhóu)上的基向量(liàng)是uc, vc, wc。當刀具坐標係Ocxcyczc放置在曲麵坐標係Ox yz 中時, Oc在Ox y z 的坐標為( xOc, y Oc, z Oc ) , 同時坐標係基向量uc, vc, wc的坐標分(fèn)別為( x uc , y uc , z uc) , ( x vc, y vc, z vc) , ( x wc, ywc, z wc) 。在這種情況下, P 在曲麵坐標係Oxy z 下的坐標為( x, y , z ) 。如(rú)圖5 所示(shì), 可以列式如下
21 2 全局幹涉(shè)檢測
依據坐標係變換原理, 局部坐標係L 取刀具接觸點法矢量方(fāng)向表(biǎo)示z 軸( 如圖6a) , 刀具走刀方向表示y 軸, 根據右手法則確定x 軸, 將待判斷檢(jiǎn)測的數據點轉(zhuǎn)換到局部坐(zuò)標係中, 判斷其是否全(quán)局幹涉。
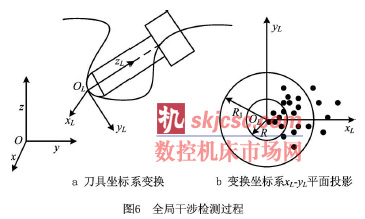
換的數據點坐標表示在刀具局部坐標係下的x L-y L 內, 如圖6b 所示。當滿(mǎn)足式(shì)( 6) 和式( 7) 時存在幹涉。在(zài)實際加工過(guò)程中, 由於夾具也有可能存在碰刀(dāo)現象, 加工過程中必(bì)須將夾具作為檢測的一部分考慮到加工曲麵內
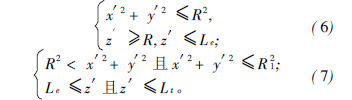
當滿足式(shì)( 6) 的情況時, 刀具的中部刀杆與曲麵存在幹涉; 當滿足式( 7) 的情(qíng)況時, 刀具尾部(bù)刀杆(gǎn)大端部和加工曲(qǔ)麵存在幹涉。
21 3 刀具姿態調整(zhěng)避免全局幹涉
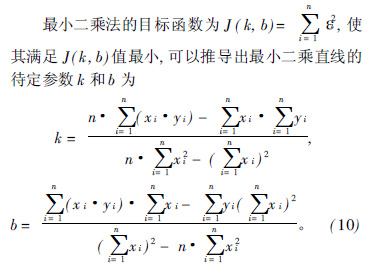
在一個刀具接觸點位(wèi)置(zhì), 刀具存在全局幹涉時往往有n 個幹涉點, 如圖6b 所(suǒ)示。綜合考慮n 個幹涉點的幹(gàn)涉情況, 可以找到一個消除幹涉的最佳方(fāng)向。本文采(cǎi)用最小包容法結合最(zuì)小(xiǎo)二乘法的(de)方法, 確定(dìng)刀具幹(gàn)涉點的最(zuì)佳擬合直線, 從而確立刀具的偏轉方向。任(rèn)選數據點中的兩個高點或低點連成一條直(zhí)線, 將所有的點包(bāo)容在(zài)高點直線和低點直線間, 形成區域的最小包容。隻(zhī)需要(yào)確定離刀具接觸點最近的一條線即可避免刀具幹涉, 為了減少搜(sōu)索次數, 利用最小二乘法進行數據擬合, 確定擬合直線方程。
( x i , y i ) 為幹涉點在刀具坐標係x L-y L 平麵(miàn)的坐標值, 如圖6b 所示(shì), 其中i= 1, 2, ,, n。設幹涉
點(diǎn)坐標建立的最小二乘(chéng)理想(xiǎng)直線方(fāng)程為
y = kx + b, ( 8)
式中k 和b 為(wéi)待定參數。取偏差為
= y i - ( kx i + b) , i = 1, 2, ,, n。 ( 9)
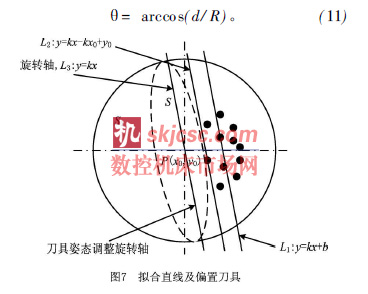
如圖(tú)7 所示, 通過式( 10) 獲(huò)得直(zhí)線方程後, 存在一點p ( x0 , y 0 ) 離刀具接觸(chù)點距離最近, 取斜(xié)率k, 過點p ( x 0 , y 0 ) 生(shēng)成直線L 2 : y= kx- kx0 + y0。如果刀具接觸點到直線L2 的(de)距離為d, 為了避免刀具全局幹涉, 必須使刀具繞直線L3 偏轉H角度, 刀(dāo)具調整姿態角度H可由式( 11) 獲得。刀具偏轉由初(chū)始位置調整到圖7 的虛線位置, 使所有的幹涉點處於刀具局部坐標係(xì)之外。在(zài)調整過程中, 調整刀具姿態時偏(piān)轉角度要在有效偏轉範圍內, 如果超出(chū)前麵計算的有效偏轉(zhuǎn)範圍, 則(zé)需要重新調整刀具偏轉角, 使刀具既(jì)要避免當前刀具幹涉, 又不能產(chǎn)生新的幹涉。
3 舉例驗證
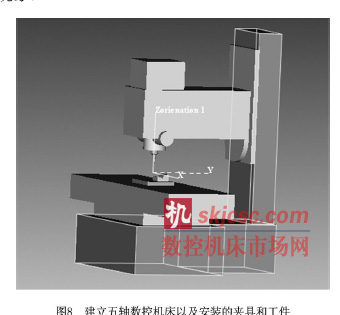
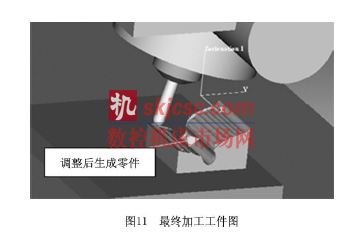
為了驗證理論的(de)可行性, 利(lì)用(yòng)Vericut 仿(fǎng)真軟件對生成(chéng)的數控代碼進行仿真加(jiā)工(gōng)。根據參考文獻 [ 13] 提出(chū)的方法(fǎ)生成(chéng)刀具軌跡, 利用本文提(tí)出的算法進行全局幹涉檢測並調整刀具姿(zī)態。將未調整前的刀具軌跡及調整後的刀(dāo)具軌跡進行仿真對比, 結果如圖8~ 圖11 所示。建立五軸數控銑床, 由圖9可以看出, 在加工過程中存在刀具及其夾具幹(gàn)涉(shè)現象。圖10 為本文提出的算法調整刀具姿態後的加工過程, 圖11 為最後的加工工件。可以看(kàn)出, 通(tōng)過調整(zhěng)刀具姿態, 避免了刀具加工過程的全(quán)局幹涉現象。


4 結束語
本(běn)文利用空間坐標(biāo)係變(biàn)換原理, 將曲麵點變換到刀(dāo)具局部坐標係中(zhōng), 進行了五軸數控(kòng)加工複雜曲(qǔ)麵全局幹涉檢測, 該過(guò)程無需進行複雜的求交計算,提高了刀具(jù)軌(guǐ)跡檢查全局幹涉的效(xiào)率。利用最小二乘法與最小包容線法確立了刀具姿態偏轉軸及其角度, 通過偏轉最小角度避免了刀具(jù)幹涉。為了防止刀具產生(shēng)新的幹(gàn)涉, 確立了(le)有效(xiào)姿態區域, 通過有效姿態區(qū)域修正刀具(jù)姿態(tài)偏轉。通(tōng)過實例驗證了以上(shàng)方法能夠準確檢測出刀具全局幹涉, 並且能夠避(bì)免刀具幹涉。
如果您有機床行(háng)業(yè)、企業相關新聞(wén)稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com








