
超精密車床主軸回轉誤差測試係統(tǒng)的研究
2016-12-14 來(lái)源:哈爾濱工業大學 作者:王世(shì)良
第(dì) 4 章
傾角運動誤差分離(lí)及實驗研究
本章將主(zhǔ)要分析主軸傾角運動誤差,在徑(jìng)向運動(dòng)誤差(chà)的基礎上(shàng)推導傾角運動(dòng)誤差求解算法;進行超精密車床主軸傾角運(yùn)動誤差實際測量實驗,並對不同轉速下主軸傾角誤差運動進行研究。
4.1 傾角運動誤差(chà)分析
4.1.1 軸線平均線的(de)確定
為(wéi)理解軸線平均線(xiàn),我們先(xiān)看一下國際機械生(shēng)產研究學會(CIRP)對回轉軸線的定義。1976 年 CIRP 發表了“關於回轉軸性能的描述和測定”的統一文件,定義了回轉軸線,即“回轉軸(zhóu)線是(shì)一條某(mǒu)指定物體繞其自身旋(xuán)轉的線段,此線段與該指定物體一起運動,並相對於軸(zhóu)線平均線(xiàn)呈現出軸向、徑向(xiàng)和(hé)角向的運動。”文件對回轉軸的回轉軸(zhóu)線給出了以上明確(què)定(dìng)義,但是並(bìng)沒有對回轉中心給出明確定義[48]。
回轉軸線(xiàn)是回轉軸在任意一個瞬時具備的屬性(xìng)線(xiàn),軸(zhóu)線平均線(xiàn)是一段(duàn)時間內對回轉軸線位置進行平均化得到的。在超精密車床主軸回轉(zhuǎn)誤差測量(liàng)中(zhōng),信號的同步運動誤差,即是將主軸的回轉誤差運動(dòng)作為周(zhōu)期性誤差運動處(chù)理。在同步誤差運動中,軸(zhóu)線(xiàn)平均線(xiàn)即為主軸周(zhōu)期性回轉一周時,回轉軸線的平均(jun1)位置。

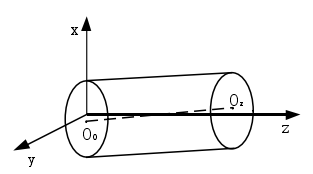
圖 4-1 回轉體軸線(xiàn)平均線模型
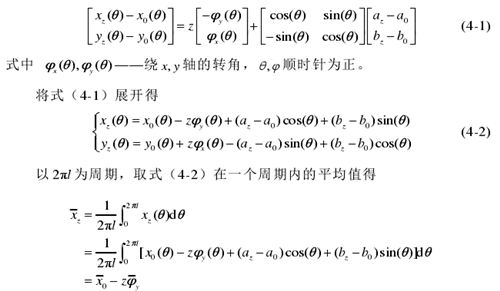
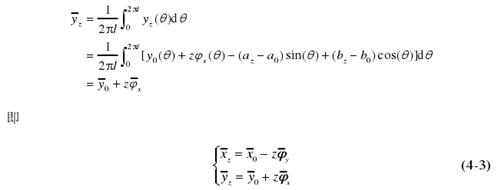
在上述方程處理過程中,我們(men)假設(shè)回轉軸(zhóu)的(de)回(huí)轉運動具(jù)有周期性。實際超精(jīng)密車床主(zhǔ)軸回轉誤差測量(liàng)中,我們提取主軸的同步運動誤差,實際上(shàng)就是將主軸的回轉誤差運動(dòng)作為周期(qī)性運動(dòng)處(chù)理的。方程(4-3)為一空間直(zhí)線方程,從方程中看(kàn)出,任意截(jié)麵中的任意(yì)點在回轉軸回轉一個周(zhōu)期內平均位置不變,這(zhè)個平均位置(zhì)點即為平均回轉中心。雖然在推導過程中,應用(yòng)的是最(zuì)小二乘圓心,但是沒有用(yòng)到最小二乘圓心的任何性質,對截麵內任意一點,公(gōng)式依(yī)然成立。上式中的空間方程即為軸線平均線,由平均回轉中心組(zǔ)成。
從以上分析和概念可知:已知截麵(miàn)內任意一點的運動軌跡,可求出此截麵的(de)平(píng)均(jun1)回轉中心;軸線平均線是一條(tiáo)空間直線,即(jí)各個截麵求出的平均(jun1)回轉中心在一條空間直線上。所以說,已知任何兩截麵中(zhōng)任一點的運動,都可(kě)以(yǐ)唯(wéi)一的(de)求出回轉軸(zhóu)的軸線平均線。而軸線平均線是求(qiú)回轉軸(zhóu)傾角運動誤(wù)差(chà)的絕對參考線,每個時刻回(huí)轉軸的瞬時回轉軸線與平均回轉軸線有一個相對位置。
4.1.2 雙截麵測量坐標係的(de)相對位置
回轉軸每個瞬時的(de)回轉軸線與軸線平均線有一個傾角關係。回轉軸線是在雙截麵中的兩個測量坐(zuò)標係(xì)中確定的,而平均回轉軸線在空間中是固定的(de),處於固連在大地上的絕對坐標係中。所以在計算傾角誤差之前首(shǒu)先要(yào)明確的是(shì)測量坐標係與絕對坐標係的位置關係。
測(cè)量坐標係不(bú)能簡單地理解成由(yóu)傳感器(qì)的布置決定,也不要簡單地把三個傳感器軸(zhóu)線(xiàn)的交點當成測量坐標係的原點。以下將對這兩個誤區進行分析。
傳感器(qì)布置如圖 4-2 所示,兩傳感器相互垂直對截麵進行測量。建絕對立坐標(biāo)係 2,其原點是該截麵最小(xiǎo)二乘圓心(xīn)回轉一周的平均(jun1)位置(zhì)。坐標(biāo)係(xì) 1為測量坐(zuò)標係。水平和垂(chuí)直方向上的傳感器測量值記為S1(θ) 、S2(θ)。
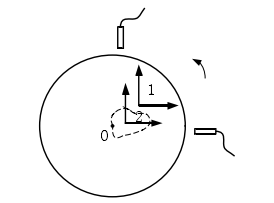
圖 4-2 測量坐(zuò)標(biāo)係(xì)與絕對坐(zuò)標係的位置關係
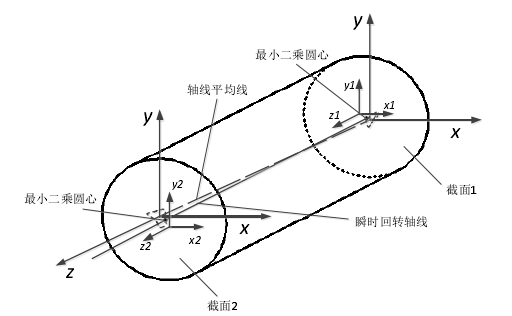
圖 4-3 雙截麵(miàn)測量坐標係與絕(jué)對坐標係的位置關係
4.1.3 傾(qīng)角運動(dòng)誤(wù)差計(jì)算
定義回轉(zhuǎn)軸的軸線平均線(xiàn)的意(yì)義在(zài)於給出決定傾角誤差運動的參考(kǎo)基準,以軸線平均線(xiàn)建立絕對坐標係,在此坐標係中(zhōng)計算回轉軸回轉周期內的傾(qīng)角運動誤差。傾角運動誤差即是回轉(zhuǎn)軸每個瞬時的回轉軸(zhóu)線在絕對坐標係中對x 軸(zhóu)和 y 的轉角關係(xì)。
計算回轉軸的傾角運動(dòng)誤差要(yào)對回轉軸的(de)兩個(gè)截麵的回轉運動誤(wù)差進行測量,對兩個截麵的數據進行綜合處理得出傾角運動誤差。當回轉軸以一定轉速穩定轉動後,其軸線平均線在空間中是一條固定的直線,基於此線建立(lì)絕對坐標係。每個截麵由傳感(gǎn)器的安裝位(wèi)置各自決定此(cǐ)截麵的測量坐標(biāo)係,兩個測量坐標係在絕對坐(zuò)標(biāo)係中處於不同的(de)位置。
兩個截麵數據要進行綜合(hé)處理的一個非常關鍵的因素是確定(dìng)兩個截麵的測量數據要轉化到一個坐標係中進行處理(lǐ),否則結果就是失真的。測(cè)量(liàng)數據是依賴於測量坐(zuò)標(biāo)係的,根據上節的(de)結論,去掉直流分(fèn)量的傳(chuán)感器測量值將依賴於絕對坐標係(測量坐標(biāo)係與絕對坐標(biāo)係(xì)重合),測量坐標係在絕對坐標係中的位置,所以可以將測量坐標(biāo)係的數據轉化到(dào)絕對坐標係中進(jìn)行求解。
第一個測(cè)量截麵為定義(yì)為基準麵,在此(cǐ)截麵上測量的徑向運動誤差將作為(wéi)基準,通過(guò)第二個截麵的徑向運動誤(wù)差來求得主軸的傾角運動(dòng)誤差(chà)。
主軸的兩個截麵上的徑向運動誤差相差很小,對於一般主軸差值是微米級,對超精密車床來說此差值的數量級都是在亞微米級(jí)。而兩個測量(liàng)截(jié)麵的間距 l 是毫米(mǐ)級或是更大,所以公式(4-4)和公(4-5)可做(zuò)如下簡化(huà)為

4.2 傾角運動誤差(chà)測量實驗及分析
4.2.1 傾角運動誤差測量實驗方案
傾角誤差是指(zhǐ)主軸軸線繞 x,y 軸的轉動傾(qīng)角,測量時要對被測試件(jiàn)垂直於軸線的兩(liǎng)個截麵進行同(tóng)時測(cè)量。基於每個截麵需要 3 個位(wèi)移傳感器進行徑向運動誤差的分離,如果進行在線時時測量,則共需 6 個傳感器。鑒於實驗設備的缺乏,傾角誤差試驗將分兩步(bù)進行。
第一步,對兩個截麵分別進行三點法頻域誤差分離試驗,如圖(tú) 4-4。此步(bù)的目(mù)的是得到被測試件在各個截麵的圓度誤差(chà),同時也能得(dé)到主軸在此截麵平麵內的徑向運(yùn)動誤差。
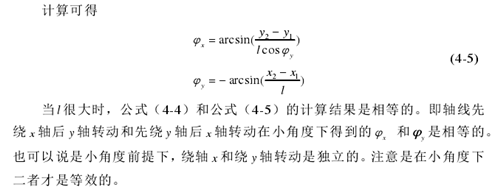
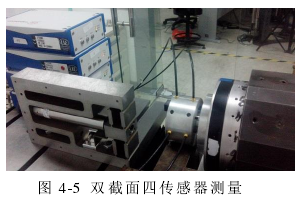
第(dì)二(èr)步,在兩個截麵內的 x,y 方向上同時架設 4 個位移傳感器,對主軸的誤差(chà)運動進行測量,如圖 4-5,數據處理將在下(xià)麵的小節中(zhōng)詳(xiáng)細介紹。
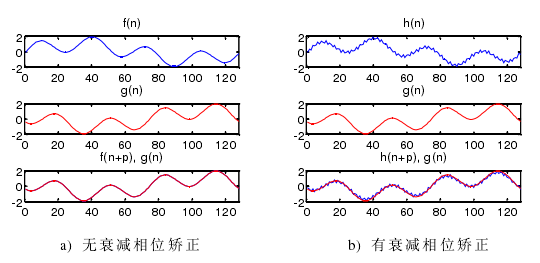
圖(tú) 4-6 相位矯正
4.2.2 相同點位非同時測量值的相位矯正
因(yīn)為傾(qīng)角運動誤差需要分兩次測量,而且本實驗所用超精密車床的編碼器(qì)是增量式而非絕對式的,給實際(jì)測量(liàng)實驗帶來了一定困難。本節將研究傳感器在同一位置的兩次測量值如何(hé)保證具有相同的測(cè)量起點。
給定一離散周期信號 s(n),從信號 s(n)中兩個不同點位開始分別取一個周期的數據,個數為 N。兩次采(cǎi)樣點序列記為 f(n),g(n),其中 g(n)=f(n+p),其中 p 為兩信號的相移點數。則問(wèn)題歸化為(wéi)已知 f(n),g(n),求兩個離散信(xìn)號序列(liè)的相移點數 p。
對 f(n),g(n)做傅裏葉變(biàn)換得
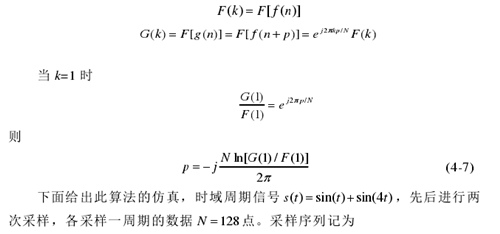
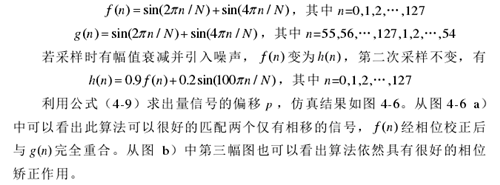
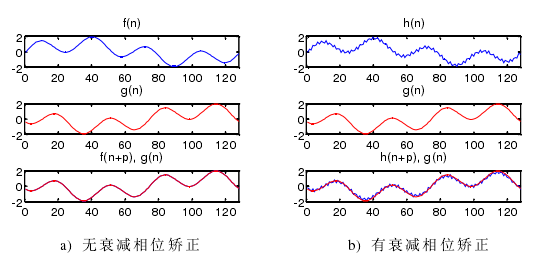
圖 4-6 相位矯正
4.2.3 傾角運動誤差分離實驗數據(jù)處理
傾角誤差分離試驗(yàn)將按兩步進行,首(shǒu)先要到的是被測試件在(zài)兩個截麵內的圓度誤差。通過對每個(gè)截麵內三個傳感器采集的數據進行處理,得到被測試(shì)件在此截麵內的圓度誤差信號。此時需要關注(zhù)的是被測試(shì)件每個點(diǎn)位上實際(jì)值(zhí),後續雙截麵同時處理時要用(yòng)到這些具體值。
第一步操作如下:
這裏不再贅述單截麵主軸徑向運動誤差和被測試件(jiàn)的圓度誤差,下麵直接給出被測試件兩(liǎng)個截麵分別進行三點法誤差分離試驗的數據結果。表 5-1和圖 4-7 給出兩個截麵測(cè)量數(shù)據的(de)最小二乘評價表和實際數據的極坐標圖。
表 5-1 兩截麵分別測量得出的圓度誤(wù)差和徑向運動誤差

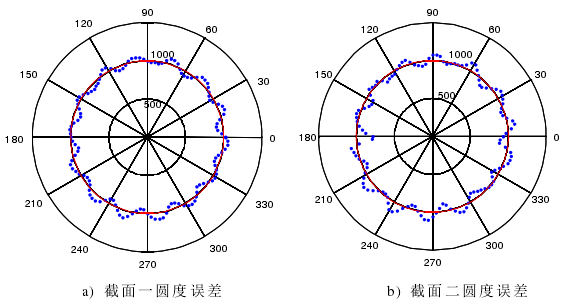
圖 4-7 雙截麵分離出的圓度誤差(矯正前)
雖然通過這一步已經分離出主軸在兩個截麵內主軸的徑向運動誤差(chà),但是我們不(bú)能用這兩個截麵在這一步測得的數據來求解主軸傾角運動誤(wù)差。原因有二(èr):第一,這兩個截麵的三點法頻域誤差分離試驗是分開進行(háng)的,也就是說兩截麵的徑向運動誤差不是同時得到的;第二,本試驗所采用的超精密車床主軸電機編碼器(qì)不是絕對式編碼器,即便不考慮原(yuán)因一,徑向運動誤差(chà)圖也存在(zài)相位移動。這些問題將通(tōng)過第二(èr)步來解決。
第二步操作如下:
四個位移傳感器分別安裝在被測試件的兩個截麵內 x,y 方向上,對(duì)主軸運動(dòng)進(jìn)行同時測量。我們已知從每個傳感器采集數據中提取的同步運(yùn)動(dòng)誤差信(xìn)號中隻包含被測試件的圓度誤差信號和主軸在此方向(xiàng)上的徑向運動誤(wù)差。而經過第一步試驗的處理我們已知(zhī)被(bèi)測試件兩截麵的圓度誤差值,此(cǐ)時從任(rèn)何一個(gè)傳(chuán)感器(qì)的同步運動誤差信號中(zhōng)減掉被測試件對應點位的圓度誤差值就會得到主軸在此(cǐ)傳感器方向上(shàng)的徑向運動誤差值。
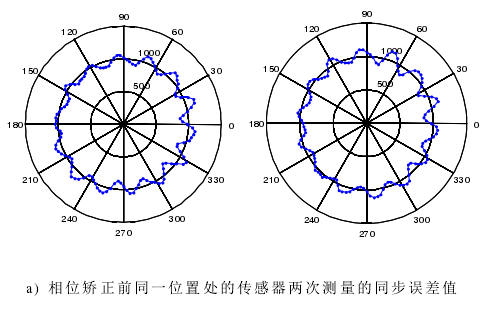
四個傳感器同時測量可以(yǐ)解(jiě)決第一步兩(liǎng)截麵徑向運動誤差非同時測量的問題,鑒於試驗用超精密車床主軸電機編碼器(qì)不是絕對編碼器,另一個需要解決的問題是同一位置處的傳感器的兩次測(cè)量數據(jù)中相位匹配,此處的相位匹配是指測量點(diǎn)位的(de)匹配對應,用軟件匹配的方法解決硬件編碼器在此次測量試驗中帶來(lái)的困難(nán)。
主軸電機轉速為 1000 r/min,傳感器采樣頻率設(shè)為 25600 Hz。主軸每旋轉一周采樣 1536 點,主軸轉動角度分辨率為 0.2344°,相當於每轉分度 1536線(xiàn)的編碼器。在同(tóng)一位置處(傳感(gǎn)器的位置,而不是測試件的測點的位置)的(de)傳感器兩次分別測量 20 轉(zhuǎn)數據,從兩次測量數據(jù)中提取的同(tóng)步運動誤差信(xìn)號分(fèn)別記為S1和S2 。因為沒有絕對編碼器,所以(yǐ)每次測量不能保證相同的起始測(cè)點。S1 和S2會在相位上出現偏差(chà),如(rú)圖 4-8 a),利(lì)用算法矯正過的圖形如圖 b)。
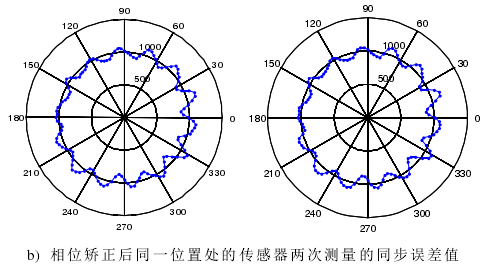
至此,我們已經(jīng)解決無絕對(duì)編碼器帶來的相位(wèi)捕捉問題(tí)。主(zhǔ)軸旋轉時對被測試件相同位置(zhì)處的兩次測量數據經過相(xiàng)位矯正後可以保證測量點位從同一點開始采集。從圖(tú) 4-8 b)可以看出相位矯正效(xiào)果是很好(hǎo)的。
將第一步和第(dì)二步傳感器信號進(jìn)行相(xiàng)位矯正後,從兩個截麵 x,y 方向上的傳感器的同步運動誤差中減掉第一步的分離出的圓度誤差即可得到兩個截(jié)麵的徑向運動誤差,如圖 4-9 所示。
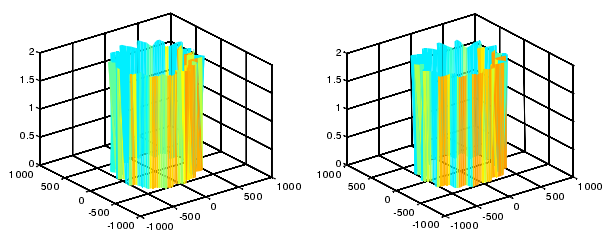
圖 4-9 左側圖為兩截麵 x 軸方向運動誤差,右側圖(tú)為兩截麵 y 軸方向運動誤差
根據公式(4-8),可計(jì)算出主軸在 x 軸和 y 軸(zhóu)方向(xiàng)上(shàng)的(de)傾(qīng)角運動誤差,如圖(tú) 4-10 所示(shì)。
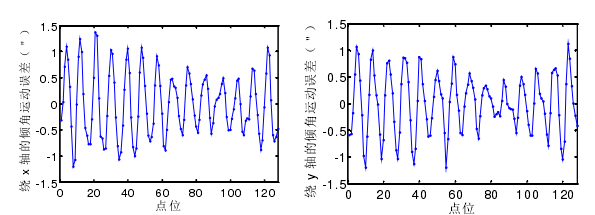
圖 4-10 繞 x 軸和 y 軸的傾角運動誤差
4.2.4 主軸轉速對傾角運動誤差的影響
上節分(fèn)析的是轉速在 1000 r/min 時,主軸繞(rào) x 軸和 y 軸(zhóu)的傾角運動誤差的分離過程。為研究(jiū)主軸轉速對傾角運動誤差的影響,試驗還對主軸轉速在600 r/min 和 200 r/min 時進(jìn)行傾角運動誤差的分離運動,試驗結果如圖 4-11。
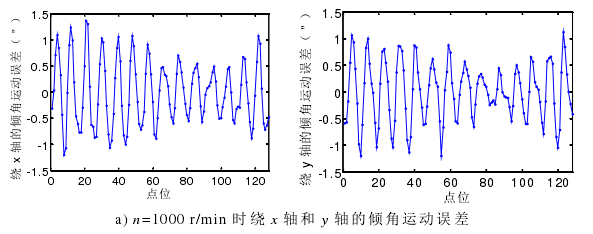
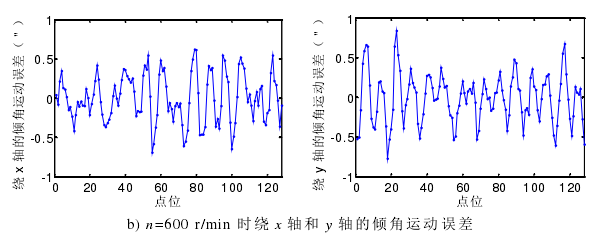
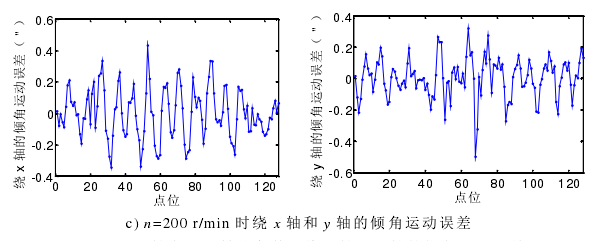
圖 4-11 主軸在不同轉速條件下繞(rào) x 軸和(hé) y 軸的(de)傾角運動誤差
從圖 4-11 可(kě)知,隨著(zhe)主(zhǔ)軸轉速的降低,傾角運動誤(wù)差隨(suí)之減小。綜合之前分析的主軸的徑向回轉運動誤差隨主軸轉速的降低而減小,可知主軸的在 1000 r/min 以內轉動,轉速越(yuè)低,其轉動穩定性越好。
4.3 本章小結(jié)
本章主要分析(xī)雙截麵測量實驗(yàn)數據在去掉直流分量後,是處在同一個坐標係——絕對坐(zuò)標係中的,為傾角運動誤差的(de)計算提供有效數據(jù);在徑向運動誤差的基礎(chǔ)上推導(dǎo)傾角運動(dòng)誤差求解算法;進行超(chāo)精密車床主軸傾角運動誤差(chà)實際測量實驗,並對不同轉速下主軸(zhóu)傾角誤(wù)差運動進行研究。
結論
超精密(mì)主軸回轉(zhuǎn)誤差是影響加工工件表麵質量的最(zuì)主要因(yīn)素,研究超(chāo)精密主(zhǔ)軸回轉誤差對於評價主軸回轉精度,監測診斷主軸運行故障(zhàng),預測(cè)機床加工工件表麵形狀誤差,加工誤差補償及提高機床加工精度等有重要意義。本文以三點法頻域誤差分離技術為(wéi)基(jī)礎(chǔ),以超精密車床主軸為研究(jiū)對象,研究主軸的徑向運動誤(wù)差和傾角運動誤差的(de)分離。結論如下(xià):
(1)從傳(chuán)感器測量值實際數學模型的解析構成(chéng)角度證明最小(xiǎo)二(èr)乘偏心運動對主軸徑向誤差運動(dòng)的(de)不(bú)可分離(lí)性。給出實際測量環境下傳(chuán)感器安裝角位置偏(piān)差和安(ān)裝(zhuāng)線偏差對誤差分離精(jīng)度的定量分析,為超精密車床主軸(zhóu)回轉誤差納米級測量采集數(shù)據(jù)的可靠性(xìng)提高理(lǐ)論保證。
(2)在頻域中對(duì)除噪、濾波、同步運動誤(wù)差的提取(qǔ)以及三點法算法的(de)前半部分進行連續性處理,減少測量信號在時域(yù)頻域中的變(biàn)換(huàn)計算。從超精密車床(chuáng)加工工件表麵成形角度分析去除一階諧波分量的依據。
(3)實際測出超精密車床(chuáng)主軸徑向運動誤差,並(bìng)根據推導出的主軸傾(qīng)角運動誤差分離算法,測得超精密車床(chuáng)主軸傾角誤(wù)差。
本文搭建的超精密車床主軸回轉誤差測試係統還存在一定的問題。雖然摒棄了安(ān)裝標準件到主軸上進行測量的方案,采用超(chāo)精密(mì)車(chē)床自身加工高精(jīng)度測試件在無拆卸狀態下(xià)直接進行測(cè)量,依然不能很好地解決最小二乘偏心運動對主軸回轉誤差(chà)的影(yǐng)響。在今(jīn)後的工作中,將重點解決一下幾個問題:
(1)主軸徑向運動誤差的一階諧波分量與被測截麵(miàn)最(zuì)小二乘偏心運動量的分離(lí)。一階(jiē)諧波分量的分離同樣(yàng)影響到傾角運動誤(wù)差的分離,所以此問題需(xū)待解決。
(2)主軸回轉誤(wù)差是影響超精密車床加工對稱回轉體和快刀加工非(fēi)對稱回轉體的表麵質量最(zuì)主要的因素,所以回轉誤差的加工補償也是後續工作的重點。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯(lián)係(xì)本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯(lián)係(xì)本網編輯部, 郵箱:skjcsc@vip.sina.com
更多本專題新聞
名企推薦







專題點(diǎn)擊前十
| 更(gèng)多

