
當前,我國的製造業正在不(bú)斷地向高柔性、高精度、高(gāo)技術密集方向發展,作為高端製(zhì)造裝備的五軸加工中(zhōng)心,日漸(jiàn)成為(wéi)不少數控機床設計與製造企業(yè)新的研製、開發、推廣目標,也是未(wèi)來很長一段時間內,該類公司的新利潤增長點; 同時各類機(jī)械加工生產企業,對(duì)這類高端機床的需求(qiú)欲望也日益強烈。
從機床設計、製造角度看,五軸加(jiā)工中心相對於普通三軸、四軸(zhóu)加工中心而言,其結構布局更加複雜,CNC 配置更加(jiā)靈活。其機械本體與所用CNC 之間的整體協調性,機床靜態布局與其動態位姿匹配(pèi)則是總體設計階段首先(xiān)要解決好的問題。為此(cǐ),筆者研究了各類計算機輔(fǔ)助(zhù)設計( CAD) 平台和數控加(jiā)工驗證平台,提出了一(yī)種(zhǒng)融合兩方麵技術,實現五(wǔ)軸加工(gōng)中(zhōng)心高效率、高質量研發的方法。
1 五軸加工中(zhōng)心(xīn)的特點及總體設計工作
1. 1 五軸加工(gōng)中心類型
所謂加工中(zhōng)心的五軸,是指3 個移動軸( X /Y /Z) 和兩個(gè)轉動軸( A /B /C 中任意兩個) 。不同轉動軸的組合方(fāng)式,就形(xíng)成了不同的五軸加工中心類型; 不同的類型,其(qí)總體性能特點和適用範圍也不相同。從兩個轉動軸(zhóu)所依附的機械本體而(ér)言,可以把五軸(zhóu)加工中心大致分為(wéi)3 種基本型: ( 1) 兩個(gè)轉動軸都由工作(zuò)台來完成;
(2) 兩個轉(zhuǎn)動軸都由主軸來完成;
(3) 混合方式———一個轉動軸由工作台完成,另(lìng)一個轉動由主軸來完成。進一步(bù)考慮A /B /C 以及主軸(zhóu)的(de)立、臥方式,可以細分出(chū)更多具體的配置方式。不同的配置(zhì)方式,各有不同的優缺點。
考慮到第3 種類型———混合方式,具備第1、2 兩種類型(xíng)的一些共同特性: 高剛度和大行程,可以實現重載與高速數控加工。因此,本文(wén)以第3 種基(jī)本型———混合( 複合) 型,並結合立(lì)、臥兩類布局,詳(xiáng)細說明融合CAD 技術和數控加工後置驗(yàn)證技術,分析(xī)五軸(zhóu)加工中心總體設計的基本原理和方法。
1.2 五軸加工中心總體布局(jú)CAD
由於曆史沿襲和使用習慣原因,國內不同地域、不同企(qǐ)業使用的CAD 平台,各不相同。從低(dī)端專用產品設計軟件包到集大成的Catia 不(bú)等,但其中,計算機(jī)輔助產(chǎn)品開發(fā)的基本原理是相同的,即: 從市場需求中獲取產品工程特征要素,把這些工程要素,轉(zhuǎn)換成產品總體特征模型; 對該總體模型(xíng)進行可行性、可靠性、技術經濟性等(děng)初步評估( 也稱產(chǎn)品概念設(shè)計) ; 結合手工分析和(hé)各個層次的CAE 技術,包(bāo)括使用產品各個層級的數字樣機技術,進行產品各個次級零部件細化設計( CAD 過程中,特征信息不斷(duàn)地被傳遞、升級、完善) ,此細化過程中實質是融合DFX( Design for Manufacturing,Design for Assembly,Design for Dismantle…) 理念的並(bìng)行設計; 數字樣機被驗證無(wú)誤之後,便是物理樣機的試製、評估、量產、市場反饋、更新……不斷迭代(dài)升級而使產品(pǐn)持續地被完美化。顯而易見,這(zhè)一複雜過程中,產品的總體設計起(qǐ)著統領(lǐng)全局的關鍵作用。對於五軸加(jiā)工中心這類高端產品而言,更是如(rú)此。現以(yǐ)Inventor和Solidworks 兩個(gè)CAD 平台中,進行立、臥兩種混合型五軸加工中心總體布局設計為例,分析說明其中的關鍵問題。
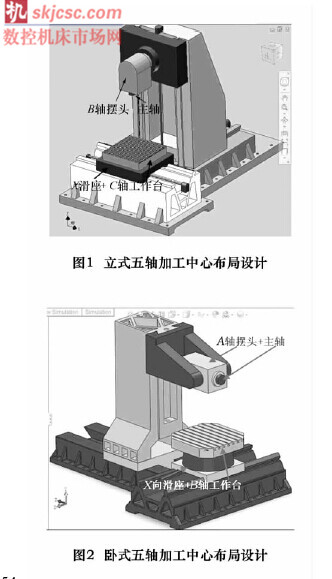
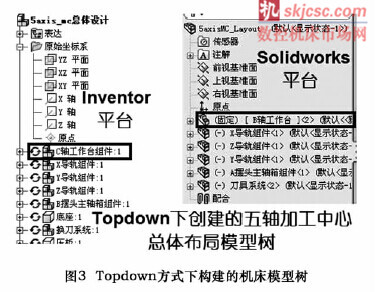
如圖1 所示,是Inventor 中立式混(hún)合型五軸加工中心總體布局方(fāng)案: X /Y /Z + C 軸數控回轉工作台+ B擺動軸( 主軸依附其上,實現± 90° ~ 120°擺動(dòng)) ; 如(rú)圖2所示,是Solidworks 中臥式混合型五軸加工中心(xīn)總體布局方案: X /Y /Z + B 軸(zhóu)數控回轉工作台(tái)+ A 擺動軸( 主軸依附其上,實現± 90° ~ 120°擺動) 。此總(zǒng)體布局方(fāng)案是通過TopDown 設計和BottomUp 裝配確定的。
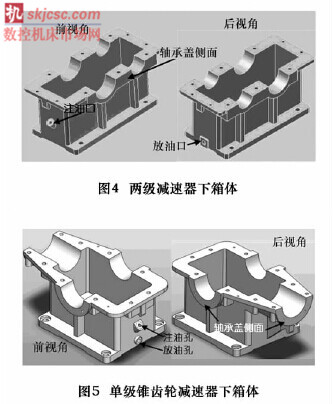
以Topdown 方式進(jìn)行布局設計時,設計平台的“組件”環境,類似於“產品開發(fā)部”。由於帶回轉工(gōng)作台的加(jiā)工中心,一般以轉台的邊長為主參數,整體加工中心就(jiù)以回轉工作台的幾何特征為驅動源———“回轉(zhuǎn)工作台”是該類(lèi)機床型譜結構變化中,控製全局的零件。所以在“產品開(kāi)發部(bù)”頂層節(jiē)點就是“回轉工作台”( 參看圖3) ,並(bìng)由此(cǐ)逐(zhú)級展開且關聯式創建(jiàn): 可以跟隨工(gōng)作台變化的加(jiā)工中心(xīn)總(zǒng)體布局特征模(mó)型。此過程不再贅述,讀者可以參看文獻[1]。
以BottomUp 方式進行(háng)加工中心裝配時,設計平台的“組件(jiàn)”環境,類似於(yú)“裝配車間”。在此“裝配車間”進行(háng)五軸加工中心組裝時,一(yī)個重(chóng)要問題就(jiù)是該數字樣機的“機床原點”與設計平(píng)台缺省(shěng)的坐標原點的一致性問題。一般情況下,五軸(zhóu)加工中心的“機床原點(diǎn)”是各個(gè)轉(zhuǎn)軸的交(jiāo)點,而X /Y /Z 方向必須符合右手直角笛卡爾(ěr)坐標係規範,由此可以建(jiàn)立機床坐標係。此坐標係應該與所用CAD 平台內缺省坐標係重(chóng)合。這一要求,必須在BottomUp 組(zǔ)裝中得到充分保證(zhèng)。需(xū)要注意的是: 不同CAD 平台往往缺(quē)省的坐標(biāo)係方位是(shì)不同的,如Solidworks 和Catia 同屬一個母公司,但兩者缺省坐(zuò)標係方位(wèi)完全不同。本文中,涉及到的Inventor和Solidworks 也是不同的: Inventor 缺省的(de)Z 是朝上(shàng)的( 圖1,與立式布局(jú)一致) ; Solidworks 缺(quē)省的(de)Z軸是水平的( 圖2,與臥式布局吻(wěn)合) 。
在CAD 平台內完成的五軸加工中心總體布局,是(shì)否能夠與數控加(jiā)工所需的複雜運動要求相適應? 即,與配套的CNC 協調一(yī)致(zhì)性如何? 目前,從低端到高端的CAD 平台內,是不能夠解答這些疑問的。在(zài)所設計的五軸加工中心物理(lǐ)樣機被製造出來之前,解決這些問題的可行性手段(duàn),便(biàn)是借助專業數控加工驗證平台,對疑問進行逐步排解。下(xià)麵以Vericut 軟件為例,針對五軸(zhóu)加工中(zhōng)心總(zǒng)體布局設計,具體說明處理(lǐ)這些問題的基(jī)本方法和關鍵措施。
2 數(shù)控加工驗證所需的準備工作
2. 1 根據機床用途選擇典型加(jiā)工零件
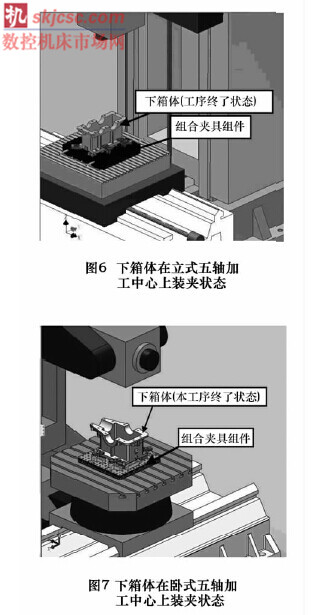
圖1 和圖2 所示的混合(hé)型五軸加工中心,在複位狀態(tài)時,主軸分別處於豎直和水平姿態。顯然,圖1 展示的機床總體布局屬於(yú)立式數控機床(chuáng)範疇,圖(tú)2 則為臥式(shì)數(shù)控機床(chuáng)範疇。這兩種機床的主軸依附在(zài)擺(bǎi)動轉(zhuǎn)頭上,工作運動時,主軸可以分別實現(xiàn)水平和立式姿態; 使用(yòng)這類機床(chuáng)加工箱(xiāng)體類零件時,一次裝夾便可以完成,除底麵之外的其他各個表(biǎo)麵(miàn)上所有加(jiā)工要求。所以,筆者選擇2 個減速器下箱體作(zuò)為典型被加工零件,來進行五軸加工中心總體布局相(xiàng)關問題的探索。
如圖4 和5 所示,是兩種不同類型的上下合蓋式減速(sù)器的下箱體。完整的減速器上下(xià)合(hé)蓋(gài)加工(gōng)工藝規程設計,不屬(shǔ)於本研究、討論範圍(wéi),本文選擇其分體(tǐ)粗加工階段、使用五軸加(jiā)工中心,完成下箱(xiāng)體各個相關表麵的(de)預加工工序,以研究五軸加(jiā)工中心機械本體與由CNC 驅動(dòng)的運動之間,協調(diào)性與合理性方麵的問題。
2.2 完成典型零件(jiàn)的(de)數控程序
從圖4 和圖5 可以看出,下箱體的預加(jiā)工階段,需要對頂麵、兩軸承蓋側麵以及注油口側麵( 含斜麵和垂麵) 上的孔係和平麵進(jìn)行初步加工。考慮到柔(róu)性製造的(de)發展趨勢,本例(lì)中,用組合夾具實現(xiàn)工件的裝夾要求。圖6 和圖7 分(fèn)別是兩個零件預加時,在(zài)立、臥五軸加工中心上(shàng)被裝夾後的狀態(tài)展示。計算機輔(fǔ)助數控編程( CAM) 時,可以連同夾具一起導入到(dào)CAM 平台,也可以單獨把下箱體( 預加工終了狀態特征(zhēng)結(jié)構) 導入CAM 平台,來完成數控程序。
完成的數控程序和相應刀具信息,將是(shì)加工中心後置(zhì)驗(yàn)證時的基(jī)礎(chǔ)信息。有關G 代碼解讀與修改等數控程序(xù)後置驗證問題,不(bú)是本(běn)文研(yán)究的重點(diǎn)內容。
2.3 創建機床驗證模型樹及其模型
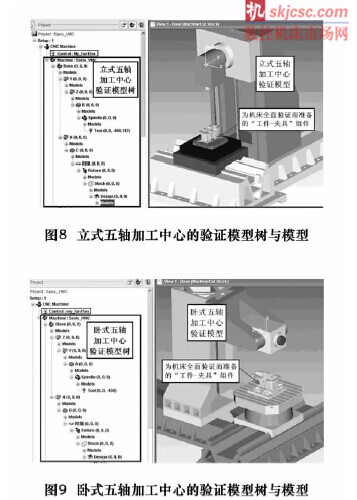
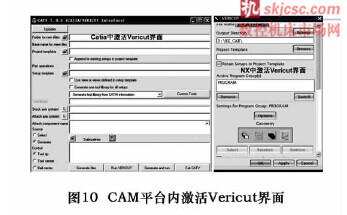
首先在Vericut 中創建與立、臥五軸加工(gōng)中(zhōng)心各零部件結構拓(tuò)撲關係一致的模型(xíng)樹。在模型樹的相應節點,導入CAD 平台中已經完成的(de)各個零部件模(mó)型文件( 與此過(guò)程相關的細節,請參看文獻[1]) 。如圖8 和圖9 所示,分別是在Vericut 驗證平台中,立式和(hé)臥式五軸加工中心的驗(yàn)證模型樹和模型。
2.4 把工裝信息和數控(kòng)程序導入驗證平台
在模型樹的“Fixture”節點導(dǎo)入組合夾具模型文件; 在(zài)模型樹(shù)的“Stock”節點導入“本工(gōng)序前(qián)工件狀態”模型( 毛坯) 文(wén)件; 在模型樹的“Design節點導入“本工序終了工件狀態”模型文件。數控程序可以直接在“NC Programs”中,導入由CAM 平台創建的數控文件。
 ‘
‘
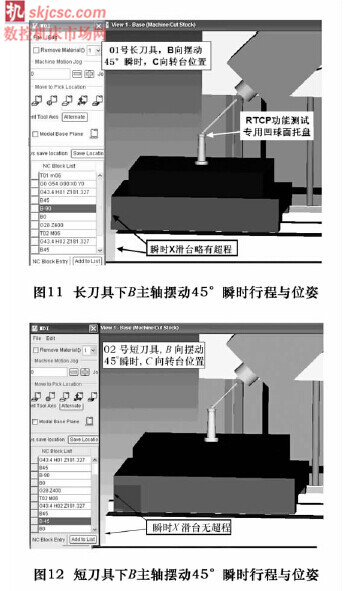
而數控加工中的多把刀具信息,則必須借助CAM平台和Vericut 平台之間的(de)無縫連接技術,進(jìn)行數據的傳遞。如圖10 所示,分別是Catia /CAM( 左) 和SiemensNX/CAM( 右) 平台下激活(huó)Vericut 對話框。與此(cǐ)相關的一些具體方法,讀者還可以(yǐ)參看文獻[1]。
3 五軸加工中心的加工運行驗證及改進案例
3.1 為驗證模(mó)型設定CNC 型號
在模型樹的Control 節點,根據機床製造企業實際(jì)為五軸(zhóu)加工中心配置的CNC 型(xíng)號,從Vericut 控(kòng)製(zhì)器數據庫中選擇相應的“* . ctl”文件進行(háng)加載。參看圖8 和(hé)圖(tú)9 左上角線框部分,本次研究中,選擇的是Fanuc15M 控製器。
3.2 MDI 方式初步驗證及RTCP 功能(néng)觀察實例(lì)
在MDI 調試(shì)環境中,逐行輸入相關G 代碼指令,驅動(dòng)機床運動。此方式可直觀目測: 主軸擺(bǎi)動、工作台轉動、X /Y /Z 向直線移動等是否(fǒu)合適。進而,可以(yǐ)初步判斷五軸加工中心(xīn)機械(xiè)本體與CNC 的協調性好壞與否。下麵,以(yǐ)RTCP 功能動作為例(lì),進行說明。
RTCP 是五軸加工中心工作中,考慮刀具長度三維補償時特有(yǒu)的問題。有關RTCP 編程及後置驗證方麵的問(wèn)題,不(bú)是本文(wén)討論的(de)重點。此處,筆者從機床設計(jì)角度,討論針對CNC 的RTCP 功能,在五軸加工中心總體布局確定過(guò)程中,需要注意的問題。
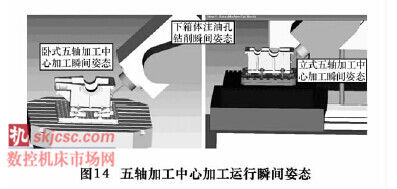
五軸加(jiā)工中心在(zài)激活RTCP 功能的情況下(xià),如果刀具需要相對瞬時被(bèi)加工麵的法向,進行角度調整時,其主軸將以刀位點為樞軸進行(háng)轉動,轉動的角度是通過對應的X /Y /Z 向直線位移增量來獲得的。此時,刀杆越長(zhǎng),轉角越大,需要(yào)X /Y /Z 向移動的行程就越大。作為機床總體布局設計而言,這個因(yīn)素是(shì)需要考慮在內的( 若不修改G 代碼,機床就需要額外增加行程空間) 。如(rú)圖11 ~ 13,展示的是不同長短刀具、不同(tóng)轉動角度下,可以直觀發現的行程問題。
MDI 方式並不能預(yù)知五(wǔ)軸(zhóu)加工中心在複雜、多(duō)變的實際加工狀態下,是否(fǒu)能夠順利實(shí)現工作運(yùn)行。因此,就需要借助對實際(jì)數控加工程序的運行(háng)觀察,來完成機床運動協調性的全麵驗證。

3.3 總(zǒng)體(tǐ)布局的(de)全麵驗證
五軸(zhóu)加工中心,將來麵對的工作任務,大體可以分(fèn)為兩種(zhǒng)情況,一種是“多麵定向加工”場合; 另一種(zhǒng)為(wéi)“五軸聯動”方式加工複雜自由曲麵。對五軸加工中心設計者而言,需要查看的是(shì): 在加工運動過(guò)程中或在(zài)不同極限方位時,五軸加工中(zhōng)心機械(xiè)本體的各個零部件是否協調? 對此,用前一種方式———“多麵(miàn)定向加工”,可以更加快捷地解決問題。2. 1 和2. 2 節中所(suǒ)涉及到的減速器下箱體預加工程序(xù),便是出(chū)於此目的而準備的。
該預加工程序運行時,將驅動五軸加工中心,完成工(gōng)作台360° 範(fàn)圍的分度轉動,同時還配合(hé)有主(zhǔ)軸±90°擺動。可看出加工運行中,涵蓋了絕大部分可能的機床姿態,而且耗時(shí)少,設計(jì)者能夠立竿見影地判斷:機(jī)床布局合理與否。圖14 展示的是立(lì)、臥(wò)五軸加工中心,鑽削下箱體45°斜麵注油孔時,瞬間運(yùn)行位姿。
3.4 發現及解決問(wèn)題(tí)案例
在MDI 方式的初步驗(yàn)證和運行完整數控程序的全麵驗證過程中,機床局部拓撲結構及尺寸上的不合理性(xìng),特別是總體布局上的不協調等諸多問題被發(fā)現和糾正。現舉一個(gè)布局由此而改進(jìn)的實例進(jìn)行說明。
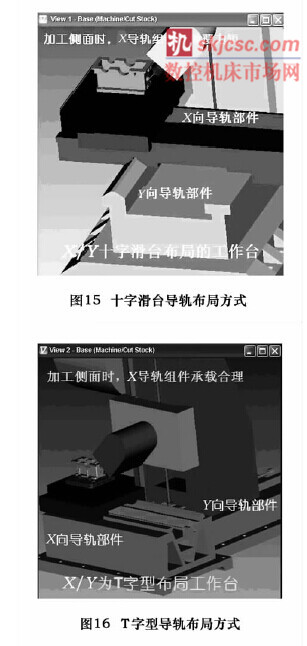
本文研(yán)究的五軸立式加工中心,在早先的配置方案中,直接借鑒了一般四軸立式加(jiā)工中心的布(bù)局結構。眾所(suǒ)周知,常見(jiàn)的(de)立式加工中(zhōng)心工作台是類似(sì)萬能立式銑床的“十字滑台”配置方式: 工作台依附在X 滑(huá)台上,X 滑台依(yī)附在固定的Y 導軌上,從而實現X /Y 直線位移。如此布局的五(wǔ)軸立式加工中心(xīn),在加(jiā)工減速器下箱體側麵時,工作台是處於左右兩個極(jí)端位(wèi)置,此時的重力載荷,將使機(jī)床的承載呈現極不對稱(chēng)性。如圖15 所示: B 軸刀具擺頭轉動45°,C 軸工作台轉(zhuǎn)動90°,進行下(xià)箱體注油孔及端(duān)麵加工(gōng)。此時整體X 導軌副因為左邊懸空而承(chéng)受顛覆力矩。這對機床導軌磨損、受力和熱平衡上的穩定性,機床的振(zhèn)動,機床的壽命都會產生負麵影響。圖16 展示的是改進(jìn)X /Y 結(jié)構布局後,相同工步的瞬時姿(zī)態。顯而易見,前述(shù)問題就不存在了。
4 結論與(yǔ)展望
對於五軸加工中心這(zhè)類(lèi)高端製造裝備而言,無論(lùn)是設(shè)計與製造者,還是終(zhōng)端用戶,都需要借助計算機輔助技術,來改善其在與此類產品相關(guān)生(shēng)產活動(dòng)中的質量、效率、成本目標。本(běn)文,從機床(chuáng)設備設(shè)計與製造(zào)者角度出發,以混合型(xíng)五(wǔ)軸(zhóu)加工中心研發(fā)工作為研究對象,分析、闡述了在不同(tóng)CAD 平台( Inventor 和Solidworks)中進行五軸加工中心總體設計(jì)以及在專業數控加工驗(yàn)證平台( Vericut) 進行機床(chuáng)運行驗(yàn)證的基本方法、工作原理和流程。結果(guǒ)證明: 五(wǔ)軸加工中心機械本(běn)體(tǐ)與其配套CNC 間,協調性上的困惑; 機床自身各(gè)個零部件間,布局合理(lǐ)性中的疑問,都可以非常(cháng)快捷而準確地被判斷並解決。高端數控機床設(shè)計與製造者可以在其(qí)習慣使用的(de)CAD 平台,借助這些通用原理與方法,來改善其五軸加工中心的設計與製造工(gōng)作。
五軸加工中心進一(yī)步的設計工作中,可以把數控加工運行驗證中的運動信息輸出到CAE 平台,而在CAE 平(píng)台(tái)內,可以結合CAD 平台的詳細工程特征信(xìn)息,進(jìn)行加工中心運(yùn)動學與動力學方麵的實時分析; 還可以使(shǐ)用FEA 方法,對機床各個零部(bù)件的物理、機械性能進行定性和定量判斷。另外,五軸加工中心的設計與製造者,也可(kě)以把加工中心總體布局幾何模型,提供給該類機床的終端用戶,以方便其在機床使用過程(chéng)中各個具體的數控程序的(de)後置驗證工作。
如果您(nín)有機床行業、企業相關新(xīn)聞稿件發表,或進行資訊合作,歡迎聯(lián)係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com








