
利用壓縮(suō)空氣作為傳遞動力或信(xìn)號的工作介質, 將機械、液壓、電氣、電子( 含PLC 控製器(qì)和微電腦) 等綜合構成控製回路(lù), 配合氣動元件, 按生(shēng)產工藝要求的順序、條件動作(zuò)的自(zì)動化技術, 稱(chēng)為氣動自動化控製(zhì)技(jì)術.
氣動(dòng)自動化係統最終以氣動執行(háng)元件驅(qū)動各種機構完成特定的動作(zuò). 氣動執行元件和各種常用機械機構組成的氣(qì)動組合機構能實現各種平麵或空間的、直線或回轉的、連續或間隙的運動. XST 型氣動分度盤就是基於上述開發思路並參閱相關文獻資料[ 1, 2] 而設(shè)計的新穎自動間隙回轉裝置.
1 XST 型氣動分度盤結構原理
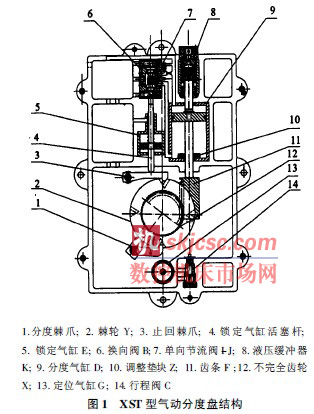
旋轉分度是傳送工件的主要形式之一. 在旋轉分度(dù)盤上(shàng), 隻需將(jiāng)工件進行(háng)一次定位和裝(zhuāng)卸, 就可以完成兩個以上、直至20 多個加工操作, 可使整個加工工序的進給功能減少到最小. 作(zuò)為加(jiā)工設備集成化的基本單元, 旋轉分度裝置在工業生產中得(dé)到了廣泛的應用, 且能適(shì)應(yīng)電力、液壓(yā)、氣壓、機械傳(chuán)動等多種動力驅動方式. XST 型氣動分度盤就是將氣壓驅動(dòng)與機械(xiè)機構傳動巧妙組合、完成(chéng)回轉分度功能的一種進(jìn)給裝置, 它特別適用於自動(dòng)裝配(pèi)線和(hé)包裝機械中需間隙分度的(de)場合, 其結構如圖1 所示.
1. 1 總體結構
由圖1 可(kě)見, 分度裝(zhuāng)置殼體中(zhōng)內置下列氣動元件: 分(fèn)度氣缸D、鎖定氣(qì)缸E、行程閥C、換向閥B、液壓緩(huǎn)衝器K、單向節流閥I-J. 齒條F 與(yǔ)缸D 活塞杆一體,F 與不完全齒輪X 相齧(niè)合, X 與棘(jí)輪Y 處於同一(yī)回轉中心但分(fèn)別支承在軸承的內外圈上, 分度(dù)盤固聯在棘輪Y 上(shàng). 此外, 在(zài)分度裝置中嵌裝了一(yī)個定位氣缸G.
1. 2 動作(zuò)原理
圖1 所示的為分(fèn)度盤初始(shǐ)狀態, 二(èr)位四通閥B未接收到輸入(rù)脈衝信號, 工作(zuò)氣壓經閥B 下位至氣(qì)缸D 下腔, 活塞杆( 齒條) 處於向上抬起(qǐ)位置.若閥B 接收到輸入信號, B 換向( 上位) , 氣缸D下腔中的氣經閥B 上位排出; 同時, 工作氣壓(yā)經(jīng)B上位打(dǎ)開單向節(jiē)流閥中的單向(xiàng)閥I 後分(fèn)3 路: 一路進入單作(zuò)用氣缸E 上腔(qiāng), 使E 的活塞杆鎖定棘爪3,也即鎖定分度盤; 一路進入雙作用氣缸D 的上腔,使D 的活塞帶動齒條F 向下移動直至壓下行程(chéng)閥C頂杆, C 打開( 上位) ; 此時經閥B 後的工(gōng)作氣壓另一路經C( 上位(wèi)) 至B 的下(xià)控製腔, 使閥(fá)B 複位(wèi)( 下位) .這(zhè)樣, 雙作用氣缸D 上腔氣體經節流閥J 從(cóng)閥B( 下位) 排(pái)出, 缸E 對棘爪3 的鎖定解除, 經閥B( 下位)進入(rù)缸D 下腔的工作(zuò)氣壓使活塞帶動齒條F 上移,棘輪( 回轉盤) 轉(zhuǎn)動, 完成一個(gè)分度動作.
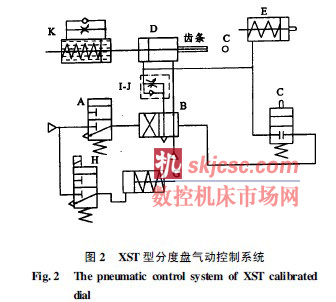
單向(xiàng)節流閥中的節流閥J 用於控製分度時缸D上腔(qiāng)的排氣速度(dù), 也即控製分(fèn)度速度. 液(yè)壓緩衝器(qì)K與(yǔ)缸D 串聯, 保證分度動作平穩, 無剛性衝擊. 定位缸G 利用帶錐麵的插銷保證分度盤分度後的定位精度, 插拔銷動作由一(yī)個電磁換向閥H 控製( 見圖2) .
1. 3 氣動控(kòng)製係統
圖2 所示為該分度裝置的氣動控製係統(tǒng). 圖2中二位三通閥A 和H 是安裝在裝置殼體之外的. 閥A 的閥芯工作位置由輸入的(de)脈衝信號控製, 該閥(fá)是用(yòng)於控製閥B 的工作(zuò)位(wèi)置的. 其它各元件作用均已在上述分度盤動作原理中闡明.
2 XST 型氣動分度盤結構特點
XST 型氣動分度盤(pán)結(jié)構新(xīn)穎、緊湊、巧妙, 具體(tǐ)體現在3 個方麵.
2. 1 嵌入式氣動元件的集合
由圖1 可見, 絕大部(bù)分氣動元件如分度氣(qì)缸D、鎖定氣缸E、定位氣缸G、液壓緩衝器K、行程閥C、換向閥B、單向節流閥I-J, 安裝形(xíng)式均采用嵌入(rù)式,且都置於裝置的同一殼體內. 部分通氣管路也置於殼體內. 這樣, 既使整個裝置結構緊湊, 也有利於密封、防泄漏和減少壓力損失. 雖然這(zhè)給裝置的殼體加工帶來(lái)複雜性, 但目前內腔加工工(gōng)藝十分成熟(shú),不會(huì)給加工帶來多大困難, 且能(néng)保證加(jiā)工質量.
2. 2 氣動元件與機械機構的巧妙組合
1) 分(fèn)度(dù)缸D 的活塞杆(gǎn)下部即(jí)為(wéi)齒條F, 通過該齒條與齒(chǐ)輪X 的(de)齧合帶動(dòng)棘輪Y 回轉, 實現分度盤的分度動作, 即由氣(qì)動執行(háng)元件驅動機械傳動機構. 分度量由齒條( 即活塞杆) 行程決定.
2) 由(yóu)於齒條F 隨活塞上(shàng)下移動, 不完(wán)全齒輪X隨(suí)之正反向旋轉, 而棘輪Y 的分度動(dòng)作隻能是單(dān)向 ( 逆時針) 轉動(dòng), 故設置了止回棘爪(zhǎo)3. 該棘爪(zhǎo)是由單作用缸E 活塞杆的下壓起(qǐ)鎖定(dìng)作用的, 即由氣動鎖定. 這點與一般機械上的棘輪機(jī)構也明顯不同.
3) 行程閥C 用於(yú)控製換向閥B 的換向, 而行程閥(fá)C 的開啟由齒條(tiáo)F 下行( 輔助運動, 上行才是(shì)分度運動) 至行程終(zhōng)了時壓合完成; 而齒條的運動(dòng)又由氣缸D 完成(chéng), 故這一(yī)過程中(zhōng)實現了氣壓與機械之(zhī)間多次的控製轉換和(hé)能量轉換(huàn).
在設(shè)計中(zhōng)把氣動元件與機械(xiè)機(jī)構、氣(qì)壓傳動與機械傳動巧妙組(zǔ)合, 能使機構設計簡化、結構輕巧,能很(hěn)好(hǎo)地完成各種特定動作, 實現各種功能. 2. 3 分度角度( 分度數) 的調節和分度定(dìng)位棘輪Y 一次回(huí)轉的角度(dù)由齒條F 的行程, 即缸D 活塞的行程決定, 而活塞行程通過調整或更換(huàn)缸D 內的(de)墊塊Z 來實現( Z 由兩半圓柱麵組成) . 所以,該裝置配合更換(huàn)部分零件不僅能進行(háng)標準分度數4的分度, 而且能實現標準分度(dù)和專用多重分度(dù)點數之間(jiān)的(de)互換.
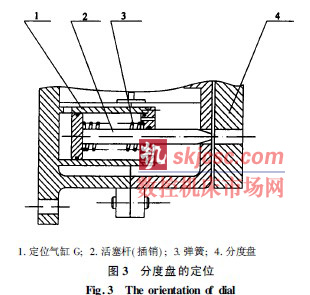
為了使分度後順利、準確定位, 設置了一單作用定(dìng)位氣缸G. 見圖3, 活塞杆2 的運(yùn)動配(pèi)合分度缸(gāng)D 活塞的運動, 在分度前(qián)讓定位銷從分度盤4 中拔出, 分度完成後插入; 銷子前端製成錐形, 這樣不僅有利(lì)於(yú)插拔銷動作, 且能保證定位精度(dù).
3 主要設計參數(shù)的確定
根(gēn)據工作情況(kuàng), 設定工作氣(qì)壓為0. 6 MPa. 實際工(gōng)作(zuò)中(zhōng), 在氣缸直(zhí)徑一定的情況下, 往往通過調整工作氣壓來適(shì)應負載的變化, 故該處的0. 6 MPa 隻是適合一般供氣壓力(lì)的一設計參數.
3. 1 雙作用氣缸D( 分度(dù)缸) 的設計計算
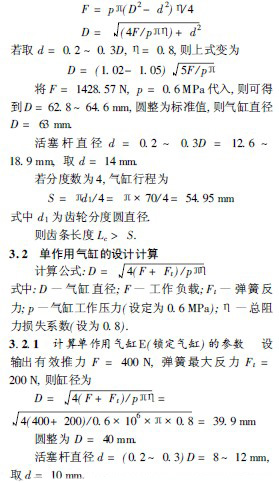
取分度齒輪的齒數z 1 = 28, 模數(shù)m = 2. 5 mm,則齒輪分度圓直徑d 1 = m z 1 = 70 mm; 設需傳遞的扭矩M = 50 Nm, 則氣缸上的工作負載F = 2M/ d1= 1 428. 57 N.
根據活塞受力(lì)平衡條件, 氣缸上(shàng)的工作負載(zǎi)為
F = [ pP( D2 - d2) / 4] – Fz
式中: Fz ) 總阻力( 由運動部件慣性力、背(bèi)壓阻(zǔ)力、密封處摩擦阻力等構成(chéng)) ; D ) 缸內直徑; d ) 活塞杆直徑; p ) 氣缸工作壓力.一般Fz 可以總阻力損(sǔn)失係數(shù)G 的形式計入公式, 則
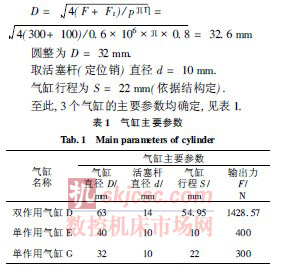
氣缸行程為S = 10 mm( 依據結構定) .
3. 2. 2 計算單作用氣缸(gāng)G( 定(dìng)位(wèi)氣缸) 的參(cān)數
設輸出有(yǒu)效推力F = 300 N, 彈簧最大反力Ft =100 N, 則缸徑為
4 分度(dù)精度的保證和提高
各種類型、各種驅動和控製方式(shì)的分度盤的關鍵技術之一是提高和保證分度精度, 這(zhè)樣才可能進入需要精密分度的應用領域, 提高產(chǎn)品的價值和生命力; 對(duì)精密(mì)分度技術的(de)研究和應用開發在國內外都是熱點. 然而, 由於空氣的可壓縮性, 較難實(shí)現分度(dù)運動的平穩(wěn)性, 故氣動分度精度的(de)提高有一(yī)定難度, 也限製了它的應用範圍.
本分度盤的設計中, 設(shè)置了定位氣缸G 且采用錐形定位銷, 又由液壓緩衝器保(bǎo)證分度動作的平穩, 實現了± 0. 03 mm 的定位精度要求.要進一(yī)步提高分度精度, 提升分度裝置的應(yīng)用價值, 對照(zhào)國內(nèi)外精密分度技術, 除(chú)了一些常規技術手段以外, 關鍵是解決終端位置的精確檢測和控製. 在(zài)傳感技術成熟發展的今天, 結合氣動技術, 可采用各種非接觸式氣動傳感器( 如背(bèi)壓式(shì)傳感器、反射式傳感器(qì)和遮斷式傳感器) 來作位置(zhì)檢測, 其輸出信號可直接(jiē)或經放大驅(qū)動控(kòng)製元件和(hé)對誤差進行實時修正. 應用高(gāo)精度的氣動(dòng)伺服(fú)定位係統也是研究開(kāi)發的方向.
5 緩衝方式的選擇和比較
本分度裝置采用與分度氣(qì)缸D 串聯安(ān)裝的液壓緩衝器(qì)K 來實現緩衝. 在氣缸D 活塞帶動齒條向上運動時, 液壓(yā)阻尼器K 發生作用, 阻尼器活塞上的單向閥關閉, 液流從內部的節(jiē)流閥通過; 同時彈簧亦吸收部分動能, 從而(ér)保證了缸D 活塞帶齒條在無剛性衝擊下緩緩上移, 分(fèn)度盤平穩回轉完成分度動作(zuò).常見(jiàn)的(de)緩衝方式有4 種.
5. 1 內部緩衝
內部緩衝是(shì)在氣缸內部設置緩衝裝置. 活塞頭部帶有緩(huǎn)衝凸台, 氣缸端部內置凹(āo)腔. 當活塞行程至凸台進入凹腔時, 氣(qì)缸右腔的(de)氣隻能通過凹凸(tū)間的空隙排出, 活塞就開始減速( 參見圖7) . 這種緩衝方(fāng)式在某些標準氣缸上也(yě)能見(jiàn)到(dào). 緩(huǎn)衝效果與合(hé)適的間隙量有關(guān).
5. 2 外部(bù)緩衝
外部緩衝是在機構上加彈簧緩衝(chōng)器、液壓緩衝器等. 彈(dàn)簧緩衝器是利用彈簧壓縮產生的彈力(lì)來(lái)吸收機械能, 其結構簡單(dān), 但緩衝效果較差, 可用於低速、輕載場合. 有時在(zài)機構行程終端加厚的橡膠彈性墊(diàn), 其(qí)原理與彈簧緩(huǎn)衝器工作原(yuán)理一樣. 液壓緩衝器能承受(shòu)高速衝擊且緩衝性能好, 故應用較多,其形式雖有多種, 但原理都是靠小孔產生阻(zǔ)尼及彈(dàn)簧(huáng)吸收能(néng)量.
圖4 所示是一種(zhǒng)多孔固定式液壓緩衝器. 當負載撞上緩衝器活塞杆時, 活塞向左運動, 活塞左腔高壓油經小(xiǎo)孔流向活塞右腔. 外力(lì)去除後, 活塞在油壓力和彈簧力作用下返回右端. 這類(lèi)緩衝器(qì)也可做成可(kě)調(diào)式的, 內部設置調節杆用以調節(jiē)小孔節流麵積, 從而改變(biàn)緩衝能力(lì). XST 型氣(qì)動分度盤采用的緩衝裝置基本屬於(yú)這一(yī)種(zhǒng).
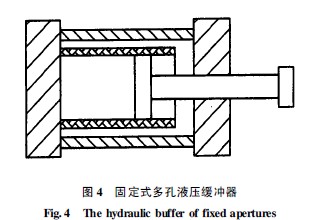
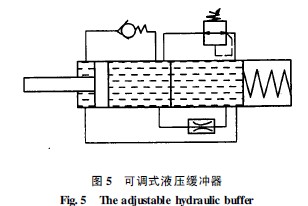
圖5 所示為另一種類的可調液(yè)壓緩衝器, 調節壓力控製閥的開度就可以控製缸右腔(qiāng)液(yè)體流(liú)動阻尼的大小, 從而調節緩衝能力.
5. 3 回路緩衝
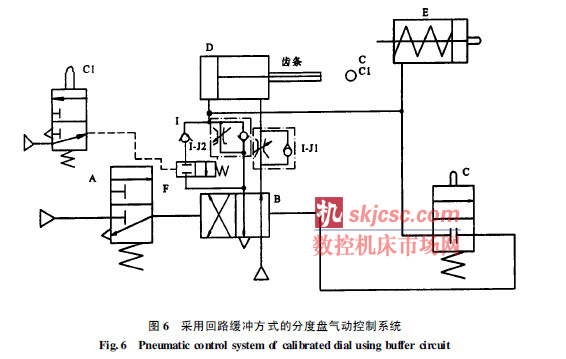
回路緩衝是在氣動係統中采用緩衝回路, 使工作氣缸活塞行程到位前(qián)減速, 從而避免衝(chōng)擊. 這種借助回(huí)路實(shí)現緩衝的方法不增加(jiā)氣缸設計和機構設計(jì)的複雜性, 隻要是(shì)對緩衝沒有特殊要求的場(chǎng)合均能(néng)采用. 圖6 即(jí)是采用回(huí)路緩衝方(fāng)式的(de)分度盤氣動控製係(xì)統.
與圖2 相比, 在該控製係統中增加了(le)二位三通行程閥C1、二(èr)位二通單氣控閥(fá)F、單向閥I 及單向節流閥(fá)I-J1. 其(qí)緩衝原理為: 齒條上行( 分度) 的速度由進氣路上的I-J1 調節, 分度氣缸D 上腔( 左腔) 的(de)氣可經單向閥I、閥F 右位( 因此時C1 是壓合位(wèi)置) 、再經閥B 右位排出; 當行程快到位(wèi)時, 因C1 已放開, 控製氣壓經(jīng)C1 下位至閥F, 使F 以左位接入,此時氣(qì)缸D 上腔( 左腔) 的氣隻能(néng)通過I-J2 中的(de)節流閥、再經閥B 右位排出, 故排氣阻力增加, 實現減速緩衝(chōng). 此(cǐ)外, 因為采用了回路緩衝方式, 故去掉了液(yè)壓緩(huǎn)衝器K.
5. 4 聯合(hé)緩衝
為了增大緩衝效果, 可以既在工作氣缸內部設置緩衝、又在(zài)機構外部安裝緩衝器. 圖7 所示(shì)的氣動直線送料機構即采(cǎi)用了此種緩衝形式. 送料氣缸1內部(bù)設置了(le)緩(huǎn)衝(chōng)裝置, 當活塞上的緩衝(chōng)套2 進入緩衝凹腔時, 排氣阻力增大, 活塞速度變慢, 實現第一步緩(huǎn)衝; 在行(háng)程終(zhōng)端設置了外部緩衝裝置, 擋塊6 進行粗略定(dìng)位調整, 擋塊7 按精確定位要求(qiú)調整好與6 的位置後用螺母5 鎖緊, 當行程接近送料長度時,送料塊4 壓著外部緩衝氣缸9 的(de)活塞杆8, 使它退回, 直(zhí)至(zhì)精確定位(wèi)擋塊7, 實現第(dì)二步緩衝(chōng)和送料的準確定位(wèi).
聯合緩衝方式適用(yòng)於對執行元件( 如氣缸) 的動作平穩性要求特別高及要求精確定位的(de)機構(gòu)中.
6 結 語(yǔ)
QST 型氣動分度盤采用氣動控製技術, 將氣動(dòng)執行(háng)元件和(hé)常(cháng)用機械傳動(dòng)機構巧妙組(zǔ)合, 實現了間隙回(huí)轉分度的功能, 該設計作為一新穎實用技術在生產實際中得到了應用(yòng).
該產品的後續研究開發重點是: 應用精密分度技術, 大幅提高分(fèn)度精度(dù)和實現抗幹擾的平穩分(fèn)度(dù); 為實現標準化和滿足互換性要求, 安(ān)裝可互(hù)換的分度板或擋塊, 使它能實現若幹個標準分度步數 ( 3, 4, 6, 8, 12, 24) , 也可實現(xiàn)多重分(fèn)度點數的分度.隻有這樣, 才能增加產品的(de)科技含量, 提升其應用價值, 拓展(zhǎn)應用領域, 實現產品真正意義上的更新換代(dài).
如果您有機床行業、企業相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎聯係本網編(biān)輯部(bù), 郵箱:skjcsc@vip.sina.com






馬")

