
計算機輔助工藝設計(CAP P: co m Pu ter Ai d ed Proc es s PI ~ ing ) 是利用計算(suàn)機(jī)輔助完(wán)成零件的工藝規程設計, 其目的是獲得優化的和(hé)標準化的工藝(yì)規程b 零件信息描述與輸人是CA PP 係統運(yùn)行的基礎(chǔ)和依據,是係統首先要解決的問題, 如何以適於計算機處理的方式描述零件特征信息, 對於CAP P 係統的輸出質量和運行效率都具有決定性的影響。
特征建模(mó)技術是C A D /c A PP/C AM 集成的關鍵(jiàn)技術。基於(yú)特征的產品數(shù)據模型不僅(jǐn)包括零件(jiàn)或產品的幾何(hé)形狀信息, 還包括產品或零件的精度(dù)信息、裝配信息、管理信息(xī)等。
特(tè)征(zhēng)可分為如下幾類川: 形狀特征、精度特征、方位特征、輪(lún)廓特征、裝配特征等(děng)。
特征技術分為(wéi)特征前處(chù)理和後處理。特征前處理是從抽象的(de)概(gài)念開始逐漸導出幾何和其它(tā)詳(xiáng)細信息的過(guò)程。
特征後(hòu)處理是指在具體參數設計時引人(rén)特征, 以盡量做(zuò)到產品(pǐn)信息描(miáo)述的完備, 它是CI MS 信息集成(chéng)的關鍵技術。它主(zhǔ)要包括: 交(jiāo)互式特征定義、特征的自(zì)動識別, 特征造型、特征映射l2. ”。本(běn)文基於(yú)特征技術對箱體類零件的(de)信息描述作了一些(xiē)探討,.提出一種實用的(de)描述方法。
1 方位特征描述(shù)
箱體類零件形體結構複雜, 形麵參數繁多, 完整而簡明地進行(háng)零件信息描述是(shì)非常困難的(de)。本文在分析常見描述方法(fǎ)的基礎上, 根據箱體類零件結構和工藝特點, 基於特征技術(shù)提出了方(fāng)位特征描(miáo)述法, 以滿足(zú)箱(xiāng)體類零件(jiàn)CA PP 係統的要求。
1. 1 零件各個方位基本(běn)描述單元
箱(xiāng)體類零件(jiàn)上需加工(gōng)的形麵多且位置關係複雜, 難以清晰而方便地描述, 因此, 簡化形(xíng)麵間的複雜關係, 以(yǐ)獲得清晰(xī)的(de)數據信息, 是(shì)零件信息描述的首要任務。箱(xiāng)體類零件外形一般呈多麵體, 其上需加工的形麵大多分布(bù)在零件表麵上, 若把零件分解(jiě)開來(lái), 則每個(gè)方向可以單獨形成一個“子件” , 每個“子件” 都有(yǒu)外形輪廓(kuò)和形(xíng)麵內容, 因(yīn)此, 方(fāng)位特征描述法並不(bú)試圖從整體(tǐ)上描述零件, 而是對零件進行分解, 零件的每個方向自成一個描述一單元。
零件的輪廓和形麵按照所在的方向進行單(dān)獨描述, 這樣可以保證獲(huò)取零件全部的輪廓和形麵信息, 同時也簡化了不(bú)同方向上形麵的(de)位置關係, 避免了數據結構的複雜和(hé)混亂。
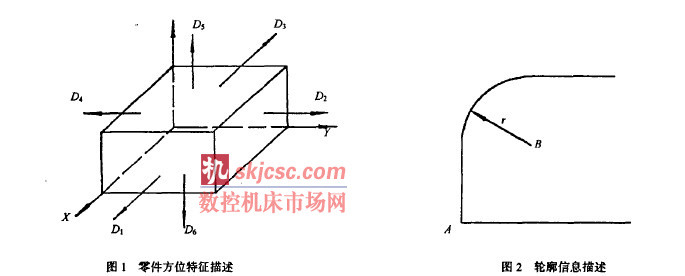
在三維空間坐標係中, 任何一個立方多麵體各表麵所在方向, 按其法線所指,共有ro 種情況, 圖1標出了其中最常見的6 個方向(xiàng)。
圖1 中(zhōng), 隻: 法向指(zhǐ)向X 軸正(zhèng)向; 幾(jǐ): 法向指向Y 軸(zhóu)正向; 幾: 法向指向X 軸負(fù)向; D. : 法向指向Y 軸負向; 幾; 法向指向Z 軸(zhóu)正向; 幾: 法向指向Z 軸(zhóu)負向。除此之外, 還有(yǒu)4 個方向: 隻: 法向與X 軸相垂直, 亦即該方向上所有平麵皆與X 軸平行, 用平麵與XO Y 平麵的正向夾角記其(qí)方(fāng)位角; 幾: 法向與Y 軸相垂直, 亦即該方向上(shàng)所有平麵皆與Y 軸平行, 用平麵與XO Y 平麵的正向夾角記其方位角; 幾:法向與Z 軸相垂直, 亦即(jí)該方向上所有平麵皆與Z 軸平行, 用平麵(miàn)與刁農淪平麵的正向夾角記其方位角;隻。: 法向與X 軸、Y 軸、z 軸皆不垂直, 用其上平麵與Xo Y 平麵的正向夾角記(jì)其方位角。
以上10 個方向構成了方位特征描述法零件分解(jiě)的基礎(chǔ), 輪(lún)廓和形麵描述將按各個方向進行.
1. 2 輪廓信息描述
從(cóng)零件幾何參(cān)數(shù)所描述的對象來考慮, 可以把零件的設計信(xìn)息分為(wéi)輪廓信息和形麵信息(xī)兩大部分。目前絕大多數非回轉體零件的CA PP 係統在進行零件描述時都沒有考慮輪廓信息(xī)描述, 其中(zhōng)的(de)重要原因是這些CAP P 係統(tǒng)是獨立的, 沒有(yǒu)考慮與(yǔ)數(shù)控編程聯接的問題(tí), 顯然, 這種CA PP 不能體現出在C A D 和CAM之間的橋(qiáo)梁作(zuò)用。作為C A PP 技術的(de)一種發展趨勢, CA D / C A PP / C A M 一體化將(jiāng)成為必然, 這就要求CAP中必須包含有(yǒu)零件的輪廓數據, 為數控編程提供必要的準備信息。基於這種考慮, 方位特征描述決包(bāo)含了零件輪廓信息描述。
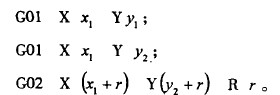
通過對各種箱體零件輪廓進行分解後可以發現, 它們(men)都是由直線、圓弧及其(qí)擬合曲線所組成·, 因此,隻要有直線、圓(yuán)弧(hú)插補功能, 就可(kě)以(yǐ)對零件輪廓進行描述。在方位特征描述法中(zhōng), 輪廓描(miáo)述是通(tōng)過記(jì)錄零件每個(gè)方向輪廓的圓弧參數和交點參數來完成的(de)。參數(shù)一(yī)律以圓心坐標和半徑記錄, 逆時針圓弧半徑為正,順(shùn)時針圓弧半徑為負, 交點視為半徑為零的圓弧(hú)。如圖2 所示, 若按順時針方向輸人, 則表示這一段局部輪廓的參數為![]() ,
,
這種(zhǒng)方法實現過程較為簡單, 所得數據很容易轉換成如下麵所示(shì)的數控代碼
1. 3 形麵(miàn)信息描述
零件形麵信息的描述, 是整個零件(jiàn)信息(xī)描述的重點。對於(yú)箱體類零件來說, 由於其形(xíng)狀複雜, 空間位置關係難以描述(shù), 因而不能象描述回轉體零件那樣詳細、準確。但對於工藝設計來說, 並不需要象C A D那樣完整、準確地(dì)描述清楚零件的幾何結構, 而隻需要描述出零件由(yóu)那些加工形麵組成及這些形麵的空間位置關係即可, 這就是方位特征描述法采用基於零件特征進行形(xíng)麵描述的基本出發點,。通過對箱體類零(líng)件上各種需加工的形麵進行分析, 可以把這些形麵歸為4 類, 即平麵、外圓柱麵、孔(kǒng)、槽, 而每類(lèi)形麵又由多種典型形式(shì)所組成, 針對每種形式設(shè)置相應的特征參數, 通過(guò)記錄這些特征參數(shù), 即可完成零件形麵信息的描述。
本文采用麵向(xiàng)對象技術中的麵向對象分析(o o A) 和麵向對象編程(o 0 巧技術, 用c + + 中的類來表達數據結構, 建立形麵(miàn)特征(zhēng)參數(shù)。現舉例如下:
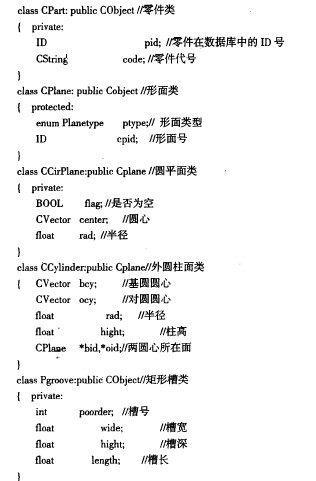
該數據(jù)模型(xíng)基本上表達了箱體類零(líng)件的形麵特征信息, 適合用來生成加工工藝規程。對於不同的零件類型和加工環境, 可以通過增加形麵類的派生類來實現, 對規劃係統不需作大的改動, 從而提高了軟(ruǎn)件係統的(de)可維護性(xìng)、可重(chóng)用性(xìng)和可移植(zhí)性。
2 結束(shù)語
零件信息描述與輸人所存在的(de)缺陷是製約CA PP 技術發展的一個重要因素, 這一問題對(duì)箱體類零件顯得尤為突出, 尋找有效的描述方法並開發相應的(de)零件信息輸人係統, 是CAP P 研(yán)究人員急需解(jiě)決的問題(tí)。
本文的方(fāng)位特征描述法, 較好地解決了箱體類零件的(de)信息描述(shù)與輸(shū)人(rén)的問題, 為工藝決策和數控編程提供了完整而準確的參數, 滿足了CA PP 係統對零件信息輸人的要求。
如果(guǒ)您有機床行業、企業相關新聞稿件發表,或進行資(zī)訊合作,歡迎(yíng)聯係本網編輯部, 郵箱:skjcsc@vip.sina.com








