
1 單對齒輪的齧合剛度(dù)模(mó)型
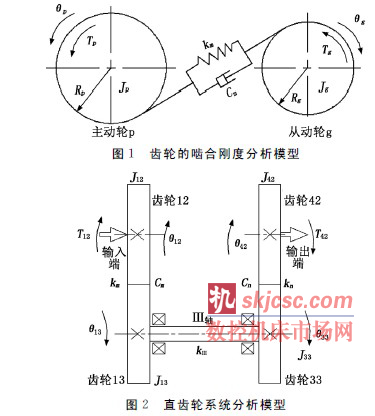
本文主(zhǔ)要(yào)考(kǎo)慮在輸入轉速和負載扭(niǔ)矩不變的條件下,輸出齒輪轉角的變化情況。齧合剛度模型是一個最基(jī)本的齒輪副分析模型,隻考慮了齒輪副本身的影響因素,忽略了傳動軸的彎曲變形、扭轉變形和軸承的支撐剛度等。齒輪的(de)齧合剛度分析模型如圖1所(suǒ)示。
其中,θp、θg分別為驅動齒輪、從動齒輪的扭(niǔ)轉位(wèi)移;
Rp、Rg分別為驅動齒輪(lún)、從(cóng)動齒輪的基圓半徑;Tg、Tp分別為負載轉矩和輸入轉矩;Jp、Jg分別為(wéi)驅動齒輪、從動齒輪的轉(zhuǎn)動慣(guàn)量;km為輪齒的齧合綜合剛度;cm為輪齒的齧合(hé)阻尼。
齒輪齧合剛度模型的建模條件是:驅動輪p勻速(sù)轉動,負載扭矩Tg為(wéi)恒定負載。假設在齧合線方向上齒輪的相對(duì)位移為x,則(zé)x=Rpθp-Rgθg。由於齒輪間的齧合力Fkm=cmx ·+kmx,則Fkm為:

齒輪副的動力學方程為:

2 傳動鏈齧合剛度動(dòng)力學模型
2.1 直齒輪係統齧合剛度動力學(xué)模(mó)型[1]
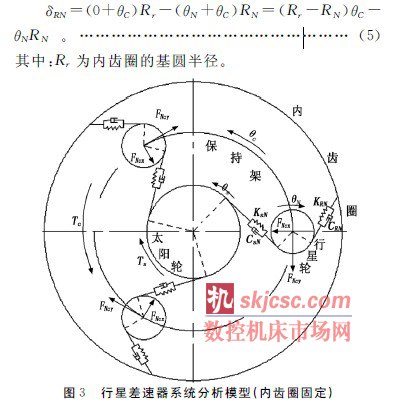
在(zài)單對齒輪副齧合剛度分析(xī)模型的基礎之上(shàng),考慮了傳動軸的扭轉剛度之後(hòu)就形成了直齒輪子係統的動力學模型,如圖2所示(shì)。其中,J12、J13、J33、J42分別(bié)為各直齒輪的轉動慣(guàn)量;θ12、θ13、θ33、θ42分別為各直(zhí)齒輪的旋轉角;T12為輸入(rù)端(duān)的驅動扭矩;T42為(wéi)輸出端的負載扭矩;cn為(wéi)齒輪副的齧合阻尼;kn為齒輪副的齧(niè)合剛度;kⅢ為Ⅲ軸的扭轉剛度。
直齒輪係統分析模型的前提條件是:輸入齒輪為(wéi)勻(yún)速旋(xuán)轉運動,輸(shū)出負載扭矩(jǔ)為恒定(dìng)負載。結合式(2)和(hé)牛頓力學理論,可以得到如下的微分方程組:

其中:R12、R13、R33、R42分別為各直齒輪的基圓半徑。
根據Laplace變換對式(3)進行處理,得到關於變量s的多元一次方程組,代(dài)入設計數據(數據保密(mì)),得出直齒輪子係統動(dòng)力學模型的轉角傳遞函數G42為:

其中:θ12、θ42分別(bié)是θ12、θ42的Laplace變(biàn)換。
其中:RS、RN分別(bié)為太陽(yáng)輪和行星輪的(de)基圓半徑。
(2)內齒圈與(yǔ)行(háng)星輪在齧合線方向上的相對位移δRN為:
2.2.2 齒輪齧合力的計算
(1)內齒圈與行星(xīng)輪(lún)的齧合力FRN為:

將式(4)~式(8)代入到式(9)、式(10)中,並轉化成方程組的形式為:

式(11)中的變量為:TC,θS,θ1,θ2,θ3。由於θ1=θ2=θ3,故用θN來替代,使之滿足θN=θ1=θ2=θ3。將
![]()
式(11)進行Laplace變換,代入設計數(shù)據(數據保密)求得(dé)轉角傳遞函數(shù)GCS:
其中:θC、θS分別為θC、θS的Laplace變換形式。
3 傳動鏈動力學總模型
將前麵的直齒輪係統和行星差速器係統的動力學模型進行綜(zōng)合,用轉(zhuǎn)角傳遞函數(shù)來表示最終的動力學模型。由(yóu)於這(zhè)兩個子係統是串聯關係,因此總傳動鏈(liàn)模型的轉角傳遞函數為:

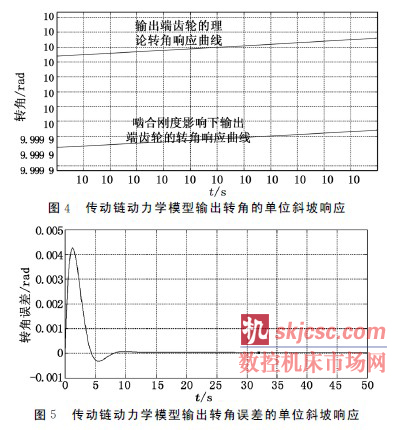
運用MATLAB軟件對轉角傳遞函數(shù)進行單位斜坡響應分析,得到的曲線如圖4、圖5所示。
4 結論
由圖4、圖5可得出如下結論:①在(zài)齧合剛度影響下的傳動鏈轉角的輸出曲線與輸(shū)入曲線之間(jiān)存在著(zhe)轉角誤差,這會影響(xiǎng)該機床傳動鏈的傳(chuán)動精度和傳遞的準確性;②轉角誤差響應曲線經過一定(dìng)的震蕩後期後,穩定(dìng)為一條(tiáo)水平的直(zhí)線,這表明齧合剛度影響下的傳動鏈轉角誤差是一個不隨時(shí)間變化的恒定;③齒輪的(de)理論轉角相應曲線的斜率與齧合剛度模型下的轉角響(xiǎng)應曲線斜率基本相同,說(shuō)明齧合剛度對傳動鏈的傳動比基本沒有影響。
如果您有機床行(háng)業、企業相關新聞稿件發表,或進行資訊合作(zuò),歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com








