



船用柴油機電控係統關鍵(jiàn)技術(shù)
2015-9-6 來源:數(shù)控機(jī)床(chuáng)市場網 作者:樊明龍 沈玉華
摘要: 針對船用(yòng)柴(chái)油機電控係統對柴油機的(de)調速問題,根據國內外非線性自調整算法(fǎ)的研究以及船用柴油機(jī)調速器的設計原理,在傳統 PID 控製的基礎(chǔ)上,本文提出非參數模(mó)型的自調整控製策略。通過對 D6135 型船用柴油機特點和性能分析,對其進行仿真建模(mó),最後在 Matlab 軟件中對柴油機調速控製係統進(jìn)行(háng)仿真(zhēn),對電控係統的(de)關鍵技(jì)術進行研究。根據(jù)仿真結果可(kě)以看出本文提出的自(zì)整定控製策略具(jù)有可(kě)行性,為(wéi)船用柴油(yóu)機電控係統提供(gòng)一個有效的控製算法。
關鍵詞(cí): 柴油機;控製;自整定
0 引言(yán)
在現(xiàn)代船用柴油機的(de)控製係統中普遍采(cǎi)用電控係統(tǒng),通過電(diàn)控(kòng)係統實現對柴油機轉速的穩定控製,使其在工況(kuàng)範圍內保證轉速(sù)波動率、恢複時間、調速率等運行參數在規定的範圍中。而通過對船用柴油機的係(xì)統運行機理進行分析,可以發現被控對象數(shù)學模型複雜,難(nán)以精確描述,具有很強的非線性特性和時滯性。並且柴油機在運行過程中還(hái)受冷卻水(shuǐ)溫度、燃油溫度、負載等外界條件影響,具有很明顯的時變(biàn)特性。傳統控製方法已經難以滿足對柴油機的控製要求,因此需要利用現代控製算法來解決柴油機的控(kòng)製問題,使其能夠運行在穩定的參數範圍內。
1 自整定(dìng)控(kòng)製算(suàn)法
1. 1 係統設計要求
1) 穩定性。穩定性是判斷控製係統性能的(de)最基本要求,其具體要求是,在有外界(jiè)幹擾的情況下,能夠保持係統的狀態能夠穩(wěn)定在(zài)一定(dìng)範圍內。
2) 收斂性。收斂性是(shì)評(píng)估一個(gè)自適應用控製係統算法優劣的重要參考標準,主要指(zhǐ)一個控(kòng)製係統在(zài)保證能夠收斂(liǎn)的條件下,可以完(wán)成係統想要達到的不同目標,同時保(bǎo)證變量(liàng)的範圍有界。
3) 魯棒(bàng)性。魯棒性是用來表示一個控製係統(tǒng)對(duì)參數擾動的(de)不敏感性。指係統在沒有特別的針(zhēn)對動態特性進行建模(mó)的情況下,遇(yù)到外界(jiè)擾動時,係統(tǒng)可以保持穩定性和動態性。
1. 2 自整(zhěng)定(dìng) PID 算法
在現代控製(zhì)係(xì)統中,一般都采用比較成熟、可(kě)靠的數字 PID 控製器,以實現較高(gāo)的控製精度。PID控製器主要有增量式和位置式 2 種算法。其中位置式 PID 控製算法應用較(jiào)為廣泛,該算法可以根據采樣時間差來計(jì)算控製量,並且 PID 公式(shì)中微分和積分項都需要離散化後才能使用,由於這一特性,導致其在運行時計算機的計算量非常繁重,並且當(dāng)輸出大幅度變化時,輸出對應的執行機(jī)構也會大幅度(dù)的跳變,很容易發生(shēng)嚴重的事故,所以不適合實驗(yàn)或開發(fā)應用。
增量式 PID 控製算(suàn)法則很好地克服(fú)了位置式 PID控製算法的缺(quē)點。增量式 PID 算法隻(zhī)要輸出控製量的增量,計算量不大,算法(fǎ)的增量控製(zhì)表達式如下(xià):

1. 3 在線自整定控製流程
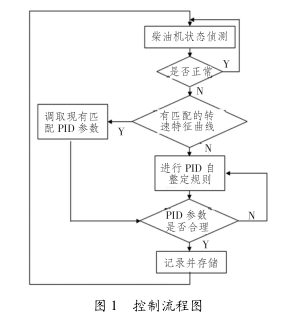
在線自整定控製算法的流程圖如圖 1 所示。從圖中可知,本算法首(shǒu)先對柴油機的(de)轉(zhuǎn)速進行檢測,然後再根據所測得的轉速在線對 PID 各參數進行判定和整定,在整定完成後,對參數進行記錄儲存。
1. 3. 1 PID 參數自整定過程
參數的自整定過程,首先是對反饋的轉速進行判斷,判(pàn)斷是否進入自(zì)整定過程,然後對參數進行暫(zàn)時存儲(chǔ),然後將反饋值與給定值進行比較,然後計算出相應的 Kp和 Ki調節參數,然後實現對方向、幅度等(děng)參數的調(diào)節。
本算法通過單周期內最(zuì)小轉速與最大(dà)轉速之間的差值對轉速變化的情況來進行(háng)判斷,然後根據轉速變化情況來確定增減 Kp和 Ki,從而達(dá)到自整定的目的。在確定調節方向後,還要確定調整幅度,若不能調整到與當前轉速相匹配,會導致調整步(bù)長過大或過小。過大則突升突降,引起係統不穩定,過小則效果不明顯,難以看到轉速變(biàn)化幅度。
本算(suàn)法通過對前後 2 次幅值的差來確定 Kp的具體調整幅度(dù)。根據式(shì)(2)和式(shì)(3),當差值小於給定的閥值時(shí),則增加調整幅度,當差值小於給定的閥值時,則降低(dī)調整幅度。依此對參數進行調整。對Ki調整方式與此類似,主(zhǔ)要判斷 2 次的差值與閥值(zhí)的(de)大小,來對調整(zhěng)幅度精細(xì)修正。
當係統(tǒng)接(jiē)近穩定時,可以(yǐ)減小調節(jiē),進入微調模式,降低 Kp和 Ki的調整步長(zhǎng),從而實現穩定調節。
1. 3. 2 參數記錄
在對 PID 參數經過一(yī)次在(zài)線調整後,根據專家自整定的相關方法,把此次調(diào)整後的結果進行記錄方(fāng)便(biàn)以後直接調用。在(zài)係統以後的(de)調整中,當遇到相同的轉速調整要求時,就可以直接調用之前已經調整好的參數,從而降低係統的計算時間和計算量。
1. 3. 3 自整定流程
本(běn)算法利用手動調(diào)整的(de)經驗來對 PID 參數進行調整。首先在進入調整模式後,先把 Ki參數定位(wèi)為 0,優先調整 Kp,使轉速動態穩定,穩(wěn)定之後調整 Ki, 控製動態誤差。在調整 Kp和(hé)Ki時,都(dōu)要遵循先(xiān)確定調整方向,然後確定調整幅度,在快要接近調整目標後,在對參數進行微調,從而(ér)快速調整(zhěng)係統達到穩定。
2 柴油機(jī)數學模(mó)型的建(jiàn)立
以 D6135 型號的船用柴油機為對象,對電控係統的關鍵技術(shù)展開研究(jiū)。重要的是需要建立係(xì)統模型,由於整個(gè)柴油機係統組成複雜,有必要對(duì)其工作過程和硬件結構進(jìn)行簡化處理,將係統一些主要(yào)的輸出狀態變量的變化過程表示出來。
2. 1 壓氣機模型
氣壓計(jì)模型(xíng)中,增壓機轉速與流量、出口的壓力(lì)溫度和氣壓機消耗的轉矩(jǔ)均為輸入參數,通過查表數據得出下列關係式:

2. 2 中冷器模型
在中冷器模型中,以氣壓計出來的(de)氣體溫度(dù)、壓力質量和流量作為輸入參數,以(yǐ)出口(kǒu)氣(qì)體壓力作為輸(shū)出參數,且工作效率為 ε= 0. 84, 從而得到出口溫度的計算公式(shì):
其中(zhōng) Tω為進口溫度;壓力損失的計算公式為:
其中: Δp0為中(zhōng)冷器的壓力(lì)損失; qm0為中冷器的流量。
2. 3 柴油機本體模型
1) 氣缸充氣效率 ηv的計算公式為:
其(qí)中(zhōng): η0為最大充氣效率; n0為充電效(xiào)率為 η0時對(duì)應的轉速。
2) 發動機流量 qm3模型氣缸內氣體流量的(de)公式為:
其中: qmf為(wéi)單位時間(jiān)噴入的燃油質量; HLHV為燃油熱(rè)量指數; QW為冷卻物帶走的熱量; Pc為單位時間內輸出(chū)的有用功; cpa和 cpe為進氣(qì)與排氣工質的比熱容(róng)。
4) 柴油機動力學模型
為了計算方便,將船用柴油機動力模型等效為一個由負載和無慣性連軸組成的係(xì)統,由牛頓第二定(dìng)律,可以得到方程:
2. 4 渦輪模型
根據渦輪轉速與質量流量(liàng)之間的關(guān)係,可以得到渦輪的膨脹比和效率,然後(hòu)得到出口溫度計算公式和發出轉矩計算公式為

2. 5 增壓器動力學模型
壓氣機的增壓器轉子平衡方程為:

2. 6 執行機(jī)構(gòu)建模
執(zhí)行器(qì)建模的方式一般有 2 種: 一是理論法,根據電磁學和動力學通過數學推導進行(háng)建(jiàn)模; 二是試驗法,根據實(shí)際實驗測得的階躍響應進行建模。在這裏采用第 2 種方式。
執行機構的階(jiē)躍響應(yīng)的一階慣性環節模型的傳遞函數為:

3 Simulink 建模及仿真(zhēn)
首先對柴(chái)油機模型(xíng)進行仿真參數設定,通過幾次試仿真實驗,發(fā)現0.001 的步長足以覆蓋到柴(chái)油機運行過程中所有的波動情況(kuàng)。所以仿真步長設定(dìng)為0.001 s,仿真時間(jiān)設(shè)定為10 s,就可以完整展(zhǎn)現整個仿真過程。而在仿真算法中,選擇固定(dìng)步長的 Ode5 算法,此算(suàn)法與變步(bù)長經典(diǎn)算法 Ode45 類似,隻需要前麵(miàn)一個時間點的解,就可以將(jiāng)當前點的(de)解計算出來。
首先在不加自整定係(xì)統情況下,先對(duì)傳統 PID參數進(jìn)行整定,經過調(diào)試,設定 Ki= 5,Kd= 0. 5,然後調整 Kp, 其餘參(cān)數不變,得到轉速變化曲線如圖 2 所示(shì)。
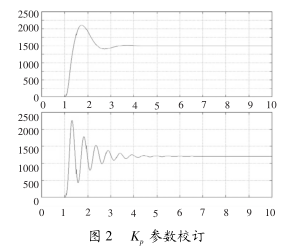
從圖2 可看出,由於 Kp從5 增大到10,導致轉速變化曲線周期和(hé)幅值都出現了明顯的變化,速度曲線甚至出現(xiàn)了大幅(fú)度的抖動,因此可以確定(dìng) Kp的值需要保持在10 以內。在整(zhěng)定 Kp時,讓調整步長在 0.01 ~0.04 之間,可以防止速度曲線出現大幅震(zhèn)蕩。
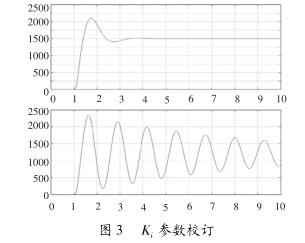
接著整定 Ki, 設定 Kp= 2.5, Kd= 0.5, 速度變化曲線如圖3 所示。根據圖3,當 Ki參數為(wéi)15 時,轉速的變化曲(qǔ)線幾乎(hū)一直(zhí)在振蕩,難以穩定下(xià)來,且震(zhèn)動幅(fú)值變大,在實驗(yàn)操作中需要盡可能避免這種情況發生,所以,在調整Ki步長參數時,每次(cì)調整保證在0.1~0.2 之間,從而降低曲線振蕩發生的可能。
最後(hòu)把 PID 自整定(dìng)模塊添加到柴油機(jī)的控製係統上,得到速度(dù)曲線如圖 4 所示。
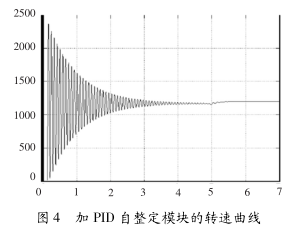
由圖4 可看出,柴油機轉速曲線在開始時震動明顯,但隨著時間的推移(yí), Kp和 Ki參數不斷自動整(zhěng)定(dìng),震動幅度(dù)明(míng)顯(xiǎn)降(jiàng)低,最終達到穩(wěn)定,證明(míng)這(zhè)種在線自整定(dìng)策(cè)略在柴油機控製係統上具有一定可行(háng)性。
4 結語
本文在對(duì)傳統的 PID 控製器的(de)基礎上,結合非線(xiàn)性自整定控製器的設計思(sī)想,根據(jù)船用柴(chái)油機調速原理,對非參數模型的在(zài)線自整定算法進行初(chū)步設計。並以 D6135 型柴油機為模型,根據其特點和性能,進行(háng)係統建模,完成了船用(yòng)柴油(yóu)機控製係統的仿真實驗,由仿真結果可以(yǐ)看出本文提(tí)出的自整定控製策略具有一定(dìng)的可行性(xìng),為柴油機電控係統的控製策略提供了一個有效的方法(fǎ)。
投稿箱:
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合(hé)作(zuò),歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發(fā)表,或進行資訊合(hé)作(zuò),歡迎聯係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信(xìn)息

業界視點
| 更多
")
行業數據
| 更多
- 2024年11月 金屬(shǔ)切削機床產量(liàng)數據
- 2024年(nián)11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況(kuàng)
- 2024年(nián)11月(yuè) 基本型乘(chéng)用車(chē)(轎車(chē))產(chǎn)量數(shù)據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月(yuè) 新能源汽(qì)車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機(jī)床產量數據
- 2024年(nián)10月 金屬切削機(jī)床產量數據
- 2024年9月 新能源汽車(chē)銷(xiāo)量情況
- 2024年8月 新能源(yuán)汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據