


數控外圓磨床精度優化設計(jì)研究現狀
2021-6-24 來源: 北京工業大學材料與製造學部 作者:範晉偉 李晨(chén)寶
摘要 : 數控外圓磨床的精度(dù)受靜態和動(dòng)態誤(wù)差的綜合作用。本文綜述了精(jīng)度優化設計的三(sān)個方麵 : 誤差建模方法、關鍵零(líng)部件靈敏度分析和精度優化分配方(fāng)法,總結了(le)現有的誤差補償研究法,並係統(tǒng)地分析了數控外(wài)圓磨床精度優(yōu)化設計中亟待解決的問題,探討了機床(chuáng)精度設計的研究方向。
關鍵詞(cí) : 精度優化設計 ; 誤差(chà)建模 ; 靈(líng)敏(mǐn)度分析 ; 精度優化分配 ; 誤差補償
1.引言
在現代機械製造業中,被稱為 “工作母機”的數控機床在製造業發展中占據無可取代的地位,其研製水平在(zài)一定程度上象征著製造業的綜合實力(lì)。隨著製(zhì)造業的高(gāo)速發展(zhǎn),對機床生產的零件精度要求日益提高,機床(chuáng)精度的研究得(dé)到廣泛重視。
加工誤差(chà)是機床加工精度在工件上最直接的體現。加工誤差是指刀具實際加工軌跡與工件理(lǐ)論輪廓(kuò)之(zhī)間(jiān)的偏差,幾何誤差是機床加工精度最直接、最關鍵的影響因素。如圖 1 所示(shì),數控(kòng)機床主要由平動軸和回轉軸構成,以數控外(wài)圓磨床為(wéi)例,各軸運動誤差相互作用,共同影響數控機床的加工精度。
數控機床精度研究主要包括精度設計(jì)和誤(wù)差補償兩(liǎng)方麵。精度設計是(shì)指在機床設計初期根據關鍵零部件誤差靈敏(mǐn)度分析結果,找到(dào)影響機床精度的(de)關鍵(jiàn)誤差源(yuán),通過提高關鍵零部件的製造(zào)精度(dù)以及合理的公差分配(pèi)方法來提升機床原始精度(dù)。誤差補償是(shì)通過(guò)硬件或軟件來調整刀具位姿、修改機床(chuáng)控製參數、調(diào)整 G 代碼來補償機床運動過程中產生的誤差。本文通過誤差建模、關鍵零部件靈敏(mǐn)度分(fèn)析、精度優化分配(pèi)以及誤差補償四個方麵,探討數控機床精度優化設計的研究現
狀(zhuàng)和亟待決的難題。
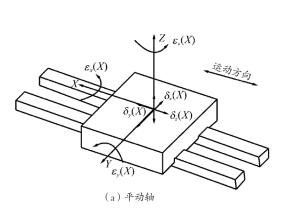
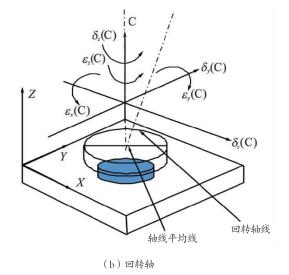
圖 1 數控外圓(yuán)磨床誤差(chà)因素
2.數控機床誤差建(jiàn)模方法
數控機床(chuáng)的主要誤差源包括零部件的製造誤(wù)差、關鍵零部(bù)件的裝配誤差(chà)、切削力產生的變形、主軸(zhóu)持續轉動引起的熱誤差以及控製誤差等(děng)。根據誤差的力學特性與動態特性,機床(chuáng)誤(wù)差通常分(fèn)為靜(jìng)態誤差與動態誤差。靜態誤(wù)差包含關鍵部件尺寸誤差和裝配(pèi)體間的位姿誤差(chà)等。動(dòng)態誤差主要包含各軸在運動過程中(zhōng)產生的(de)變形振動及熱誤差等。
為反映機床誤差源與刀具位姿誤(wù)差的映射關係,通過(guò)誤差建(jiàn)模表達機床各(gè)運動軸的空間(jiān)位姿誤差。常用數學工具主要有旋量理論、指數(shù)積公式和四元法等,其中齊次坐標(biāo)變(biàn)換(huàn)法應用最廣泛(fàn),其清晰的數學表(biǎo)達形式被廣泛應(yīng)用於(yú)機床(chuáng)的誤差建模。在誤差建模方麵,已開展大量的研究工作,目前已研究(jiū)出多種不同的運動誤差數學模型建模方法,如幾何建模法、誤差矩陣(zhèn)法、機構學建(jiàn)模(mó)法、剛體(tǐ)運動學法和多體係統理論法等。Fan J.W.等基於多體係統運動學,通過構造機床整機拓撲結
構 ( 其(qí)中相鄰體相對運動如(rú)圖 2 所(suǒ)示 ) 提出了一種通用的機床幾何(hé)誤差模型。Ding G.等基(jī)於(yú)多係統理論和齊次坐標變(biàn)換建立了五軸外圓銑(xǐ)床的空間定位精度模型。Wu C.等基於(yú)多體係統理論和相對運動約束方程,建立了五軸(zhóu)非正交數控機床的刀具位姿預測模型。
圖 2 相鄰體相對運動示意圖
目前,誤差建模研究已相(xiàng)對(duì)成熟,對於研究精密及超精密加工條件下機床(chuáng)動態因素對(duì)機床精度的影響尤為(wéi)重要,其中針對運動過程中產生(shēng)的變形研究(jiū)較(jiào)多,針對熱誤差的研究相對(duì)較少。
3.關鍵(jiàn)零部件靈敏度分析
機床誤差(chà)靈(líng)敏度分析是通過研究零部件幾何誤(wù)差的不確定性(xìng)來源對(duì)機床加工精度的敏感程度(dù),對各零部件按敏感程度排序,找出對機床(chuáng)精度影響較高項進行合理分配公差(chà),以此來提(tí)高機床空間定位精度。靈敏度分析常常被認為是誤差建模及分析的先(xiān)決條件,是機床精(jīng)度設計的重要理論依據。
目前,靈敏度分析方法主要分為(wéi)局部靈敏度分析法和全局(jú)靈敏度分析法(fǎ)。相對局部靈敏度分析,全局靈敏度(dù)分析法(fǎ)綜合考慮了各因素的概率密(mì)度函數的(de)分布(bù)及形狀的影(yǐng)響(xiǎng),在分析過程中,各因素(sù)可不斷變化。Cheng Q.等基於(yú)全局靈敏度(dù)分(fèn)析法,提出了多軸機床關鍵幾何誤差識別方法(fǎ),通過識別(bié)關鍵誤差,提高機床加工精度(dù)。Li. 等以五(wǔ)軸機床為例,在傳統靈敏度(dù)指(zhǐ)數定義基(jī)礎上提(tí)出了廣義局部靈敏度(dù)指數、廣義全局靈敏度指數和一般全局靈敏度波動指數,該方法不僅減(jiǎn)少(shǎo)了機床的誤差分量,還提高了刀具的切削精度。Fang J.等提出了基於擬蒙(méng)特卡羅算(suàn)法(fǎ)的五軸機床加(jiā)工誤差全局靈敏度分析方法。利用機床空間運動誤差模型,對各誤差源參數進行一(yī)定的數學運算,將所得結果進行歸一化處理並從大到小排序,以此來判斷對機床空間運動誤差影響較大的零部件。
靈敏度研究大多(duō)是基於機床空間誤差(chà)模(mó)型,對(duì)誤差源參數求導時會導致誤差源參數被(bèi)消掉,無法反應誤差源參數隨機床(chuáng)位置(zhì)變換而變化的特性,不能反映機床實際加(jiā)工誤差。
4.機床精度優化分(fèn)配方法
精度優化分配(pèi)是指在給定的輸出精度要求(qiú)下,分配機床關鍵零部件的精度,其關鍵在於建立(lì)合理的數控(kòng)機床整(zhěng)體的精度優化模型,並采取有效的方法進行精度優(yōu)化分配。在精度優化分配方法研(yán)究中,構建(jiàn)合理的(de)精度優化模型是研究(jiū)的重點。徐徐基於區間層次分析的機床精度層級映射方法,通過建(jiàn)立的機床精度成本和可靠性模(mó)型,利用優化的 NSGA- Ⅱ遺(yí)傳(chuán)算法,得到 Pareto最優解的機床精度(dù)分配。Cheng Q.等基於靈敏(mǐn)度分析和一次二階矩理論,構建基於多體(tǐ)理論的多軸數控(kòng)機床空間誤差模型,實現(xiàn)了以加工總成本為最小的幾何精度優化分配。Zhang Z.等考(kǎo)慮五軸機床的幾何約束,提出了基(jī)於機床幾何誤差和成本的可靠性模型的精度優化分配方法。Nujoom R.等提出了基於製造係統優化設計的多目標(biāo)數學模(mó)型,為公差優化分配奠定理論基(jī)礎(chǔ)。
在目前的優(yōu)化設計方法中,綜合成本(běn)因素過程大多依賴設計人員的經驗判斷,在實際設計中(zhōng)存在(zài)不確定性。
5.數控機床誤差補償方法
5.1幾何誤差補償
現有數控機床的幾何誤差補償方式主要有兩種(zhǒng) : 硬件補償和軟件補償。硬件補償是指針對機床(chuáng)特性,利用某些補償裝置或微(wēi)動機構對機床的幾何誤差進行修正。張兆瑞設計(jì)了一種絲杠傳動螺距矯正裝置,用於補償車床在加工精密絲杠時產生的誤(wù)差 ( 見圖 3) 。Gan S.W.等設計了一種微動補償結構,實現了高精鏡麵加工誤差(chà)補償。硬件補償可調節性(xìng)較差或調節範圍有限(xiàn),適用範圍小,當(dāng)機床的幾何誤差發生較大變化時,補償機構無法發揮作用,此外硬件補償機構具有(yǒu)針對(duì)性,製造(zào)成(chéng)本和設計周期也成為限製其發展的因素。
圖 3 基於壓(yā)電(diàn)陶瓷的微(wēi)動補償機構
軟(ruǎn)件補償是基於機床誤差預測模型發展(zhǎn)的(de),通常在幾何誤差檢測、辨(biàn)識後建立機床的加工誤差(chà)預測模型後,根據誤差預測模型計算得到工件加工過程(chéng)刀尖點的空間位置誤差,通過進行坐標係(xì)零點偏置、修(xiū)改 NC 代碼或在控製係(xì)統(tǒng)中(zhōng)增加(jiā)前反饋補償的操作方式刀具提高空間定位精度。Shen H.等基於五軸數(shù)控機床的誤差預測模型,提出了修改坐(zuò)標偏置幾何(hé)誤差補(bǔ)償方法,有效地補償了機床幾(jǐ)何(hé)誤(wù)差及熱誤差。餘文利等提(tí)出了基於粒子群優化算法的(de)數控幾何誤差補償方(fāng)法,通過 NC 代碼優化工件,有效地提高了數控機床精度,補償流程如圖 4 所示。
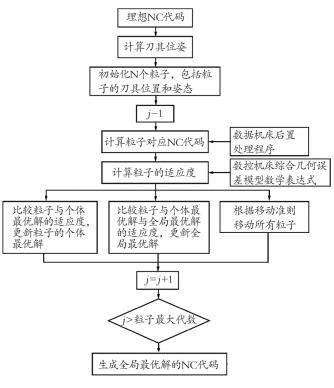
圖 4 基於 PSO 算法的幾何誤差補償方法流程
5.2動態(tài)誤差補償
動態誤差具有(yǒu)隨機、時變和動態特性,其補償方法與幾(jǐ)何誤差補償方法的差異較大。Chen C.Y.等(děng)提出了一種能夠(gòu)自適應補償(cháng)擾動的動態控製方法,通過控製自適應調節誤差補償器來實時跟蹤補償伺服係統的(de)輸出。目前動態誤差的補償方法尚處於研究(jiū)初期,機床動態(tài)精度的改善主要通過伺服增(zēng)益的優和調整(zhěng)控製算法來實(shí)現。
6.結語
本文從誤差建模、關鍵零部件靈敏度分析、精(jīng)度優化分配及誤(wù)差補償四個方麵對數控機(jī)床精度優化設計進行係統性地論述,雖然(rán)機床精度優化設計目前已(yǐ)經(jīng)取得大量研究成果,但(dàn)仍存在以(yǐ)下幾點亟待解決的問題 :
(1) 現(xiàn)有的數控機床誤差建模多以研究機床靜態性能為主。對於精密及超精密加(jiā)工,影響機床加工精度的主要因素(sù)為機床(chuáng)動態誤差。因此,建立機床動態誤差源參數模型是(shì)當前的研(yán)究重點。
(2) 靈敏(mǐn)度分析是近年來發展較迅速的新型分析方法,具有良好的診斷性和預測性。而此類研究方法得到的誤差源參數敏感度排序結果大多憑經驗得到,即距離加工點越遠的(de)零部件對機床運行精(jīng)度(dù)要求越(yuè)大。實際(jì)並未(wèi)考慮到誤差源參數(shù)隨機(jī)床(chuáng)運動而改變,如何真實反映機床實(shí)際加工誤差的產生規律是下一步研究重點。
(3) 目前的精度優化分配主要分(fèn)為公差優(yōu)化分配和幾何精度優化分配。公差優化分配即(jí)零部件公差的(de)研究(jiū),主要研究零部件的公差對該部件內部(bù)定位和幾(jǐ)何麵之間關係產生的影響以及對(duì)該零部件精度尺寸鏈累計誤(wù)差影響。目前對於零部件(jiàn)與機床誤差源參數的關係研究仍缺少一套完整的理論方法。
(4) 相比於硬(yìng)件補償,軟(ruǎn)件補償具有成本低、調節性好(hǎo)和(hé)補償方式多樣化等優(yōu)點。軟件補償(cháng)是目前的研究重點,如何提高誤差預測模型精度,提升軟件補償方法的補償(cháng)效果以及動(dòng)態誤差補償方法(fǎ)都是誤差補償研究(jiū)的方向。
投稿箱:
如果(guǒ)您(nín)有機床行業、企業相關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果(guǒ)您(nín)有機床行業、企業相關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點(diǎn)
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量(liàng)數據
- 2024年11月 分地區金屬切削機床(chuáng)產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月(yuè) 基本型乘用車(轎車)產量(liàng)數據
- 2024年(nián)11月 新能源汽車產量數據
- 2024年11月 新能源(yuán)汽車銷量情況
- 2024年10月 新能(néng)源汽車產量數據
- 2024年10月 軸(zhóu)承出口(kǒu)情況
- 2024年10月 分地區金屬切削機床產量數(shù)據
- 2024年10月(yuè) 金屬(shǔ)切削機床(chuáng)產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量(liàng)數據
- 2028年8月 基本型乘用車(轎車)產量數據