


虛擬軸可(kě)編程尾座在FANUC係統(tǒng)上的實現
2013-12-1 來源:數控機床(chuáng)市場網(wǎng) 作(zuò)者(zhě):張強 李燕 趙巍
摘要:闡述(shù)了虛擬尾座的係統硬件連接(jiē),說明了調試步驟,介紹了其工作原理及應用
關鍵詞:虛擬軸 PMC程(chéng)序 數控係統(tǒng)
Realization on FANUC System Using Dummy Axis
Abstract: This paper illuminates the system hardware configuration, working
elements, application and presents the method of dummy axis
Keywords: Dummy Axis; PMC Program; CNC System
引言
隨(suí)著自動化的普及近年(nián)數控機床得到(dào)了廣泛的應用,並在(zài)機械加工行業中獲(huò)得(dé)了認可。為了更(gèng)好的滿足自動(dòng)化生產線的發展,數控機床也需要有更好的適(shì)應性、通用性和擴展性。例如目前使用較為廣泛的液壓卡盤,液壓尾座(zuò)在(zài)實際生產中能很有效的縮短裝夾和頂緊工(gōng)件的時間,提高加工效率。而可編程尾座則是在液壓尾座的基礎上(shàng)進一步開發,對尾座的控(kòng)製更加合理和高效。本文(wén)以FANUC係統數控車(chē)床(chuáng)上配置液壓(yā)可編程尾座為例,對液壓(yā)可編程尾(wěi)座的實現(xiàn)進行論述以便其更廣泛的得到市場應用。
1、虛擬軸(zhóu)可(kě)編程(chéng)尾座的(de)工作原理
本文所指的可編程尾座是靠液壓(yā)係統提供動力,通過控製(zhì)液壓站進油和回油電磁閥帶動油缸實現尾座的前進和後退,以光柵尺作(zuò)為反饋信號進行位置(zhì)反饋,來實現編程控(kòng)製(zhì)及進給運動。與傳統液壓尾座相比較,操作者在更換工件時(shí)需要手動推拉尾座(zuò)到某個固定(dìng)位置通過液壓推動尾座內部套筒來頂緊(jǐn)工(gōng)件(jiàn),在此延長了(le)零件的加工時間,而通過(guò)程序來控製尾座移動相對普通的液壓尾座(zuò)而言,具有更好的靈(líng)活性(xìng),擴展性。如果(guǒ)給機床配上自動送料器等設備,該機床便實現了全自動化機床。
2、虛擬軸可編(biān)程尾座的硬(yìng)件連接
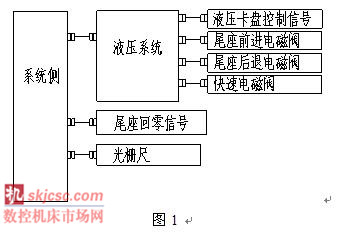
以普通的FANUC係(xì)統的數控車床為例,機床實(shí)現可編程尾(wěi)座(zuò)所需要的硬件配置,液壓係(xì)統(tǒng)、液壓卡盤(pán)、液壓(yā)尾座、光柵尺及尾座(zuò)零點開關(guān)。(見圖1)
3、虛擬軸可編程尾座控製的難點
虛擬可編程尾座一般選用增量式經濟型光柵尺(chǐ),光柵尺精度要求相對較低以滿足(zú)實際加工即可。由於是增量型光柵尺,因此機床在電源斷開後重新再次上電,尾(wěi)座在係統中的位置隻顯示零,由於沒有實體驅動,無法與係統實現真正的通訊,尾座(zuò)不能在係統(tǒng)的常規回零方式下建立機械坐標係,因此在什麽方式下,通過什麽樣地方法來建立尾座的坐標係(xì)成(chéng)為該項目的主(zhǔ)要攻破的(de)對象。
3.1尾座返參考點時的係統狀(zhuàng)態
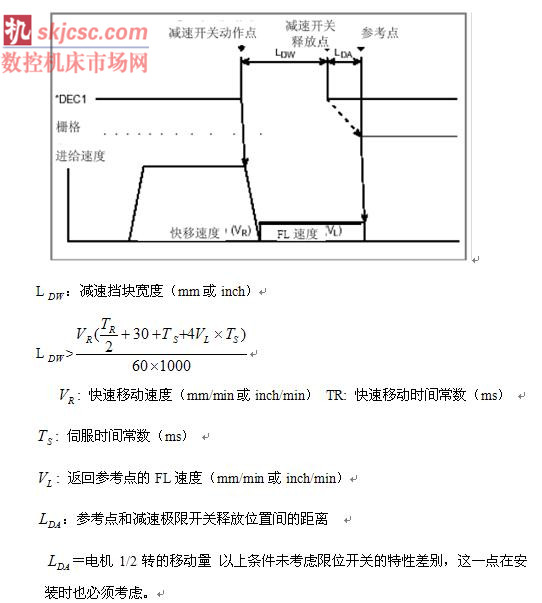
傳統的回零方法是按(àn)下操作麵板的(de)回零鍵將係統當前狀態切換(huàn)到手動參考點返回方式,然後執行(háng)相應軸參考點返回動作,各個軸在參考點返回時通(tōng)過安裝在機床上的回零減速開關尋找電機編碼器的一轉信號來確定機床的零點位置,在安裝手動返回參考點的減速開關時,要(yào)確保滿足以下條件:
對於虛擬尾座而言,由於它不具備伺服驅動器,無法係統實現真正的通訊,因此無法在(zài)手動參考點返(fǎn)回方式進行回零動作。經過(guò)可行性論證和實際調試,將(jiāng)尾座參考點返回(huí)方式和係統(tǒng)的(de)自動狀態定義在一(yī)起,當按下(xià)尾座返零(líng)方式(shì)按鍵之後(hòu),係(xì)統跳轉到自動狀態,再按下尾座返零執行按鍵之(zhī)後,尾座執行回零動作。
3.2尾座返參考(kǎo)點的執行過程(chéng)
正常的(de)係統(tǒng)軸返參考點時,首先當安裝在機床上(shàng)的限位開關被壓下時,使(shǐ)參考點減速信號變為“0”該軸移動速度減為0後,機床以固定(dìng)的低速FL移動(參數No.1425為返回參考點(diǎn)的FL進給速度),然後當減速(sù)限位開關脫開後(hòu),減速信號再次變為“1”,機床會以固(gù)定進給速度繼續進給,直到到達第1個柵格點(diǎn)(電子柵格點),並停止(zhǐ),最後(hòu)確任當前的(de)座標位(wèi)置到達到位寬度範圍內後,參考點返回結束和參考點確立信號輸出為“1”, 基本步驟的時序圖如下所(suǒ)示。
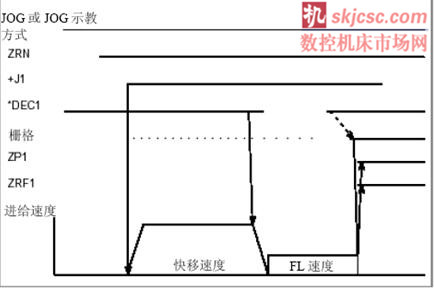
作為(wéi)虛擬尾座在執行機床返(fǎn)參考點動作時,當尾座移動到限位開關的位置時,由(yóu)限位開關發出信號給係統,係統把此信號作為第1個柵(shān)格點位置,此時通過PMC程序調(diào)用程序(G50 C0)後F60.1變為“1”,機床自動(dòng)執行循環啟(qǐ)動後F60.1變為“0”,程序運行結束後係統執行坐(zuò)標係偏移,利(lì)用工件坐標係G50將該位置設為尾座零點,返參考點動作完成。
為了安全起見,係統上電後出現可編(biān)輯“尾座未回零”報警(jǐng)作為提(tí)示信(xìn)息 ,以防止操作人員(yuán)誤操(cāo)作出現危險,此外最好將被調用的(de)程(chéng)序(xù)號設(shè)為(wéi)9000號(hào)之後的程序,然後更改參數NO.3202#4、#5實現對該程序進行(háng)保護,禁(jìn)止修改和刪除防止操作人員誤(wù)操作將程序改寫發生事故。
4、實現虛擬尾座控製的條(tiáo)件
(1) 虛擬(nǐ)尾座(zuò)上必須裝有光柵尺等類似元件。依靠該(gāi)元件將尾座的行程時時(shí)的反饋給(gěi)CNC與係統進行(háng)數據傳遞,根據光柵(shān)尺的精度,將正確的數值設置在參數NO.2084,NO.2085中,相當於標準伺(sì)服軸設定的齒輪比。
(2) 數控係統必須具有光柵尺接口。該(gāi)接口用來接(jiē)收由虛擬尾座光柵尺反饋給CNC的信(xìn)號,並將該信號轉(zhuǎn)換成液壓尾座的實際位置反映在係統的顯示窗口中。
(3) 數控係統PMC程序(xù)語言必須具有窗口(kǒu)讀功能指令。通過該功能在編程的時候輸入想要尾座移動的距(jù)離,PMC就會通過讀窗口功能將程序中要移動的距離讀入PMC,之後與當前坐標(biāo)進行比較控製尾(wěi)座前進或者後退,當到達預定目標後停止移動。
5、虛擬軸的參數調試
將外部(bù)接線按(àn)照係統(tǒng)硬件連接圖接好之(zhī)後,檢查電源電壓無誤之後(hòu),接通電源,導入編好的PMC程序,按表1設定係統參數後,係統斷電重啟,無報警後在根據需(xū)要進行其他功能(néng)調試。(NO.2084,2085根據光柵尺精(jīng)度進行設置,)
表1 虛擬軸參數設置

6 、 結語
虛擬軸可編程尾座的應用(yòng)不僅提高了機床小批量加工細長軸類零件的效率,還方便客戶組建自動柔(róu)性生產線。為那些對自動化要求(qiú)較高的(de)企業(yè)和客戶提供了選擇空(kōng)間,對於機床生產製造商(shāng)而言(yán),則是對數控係統資源的充分利用,因此該功(gōng)能具有很大的推廣空間(jiān)。(文(wén)自:沈陽機床股份有限公司)
投稿箱:
如(rú)果您有機床行業、企業相關新(xīn)聞稿件發表,或進行資訊合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
如(rú)果您有機床行業、企業相關新(xīn)聞稿件發表,或進行資訊合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數(shù)據
- 2024年11月 軸承出口(kǒu)情況
- 2024年11月 基本型乘用(yòng)車(轎車)產量數據
- 2024年11月 新能源汽車產量數據(jù)
- 2024年11月 新能源(yuán)汽車銷量情況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分(fèn)地區金屬切削機床產量(liàng)數據
- 2024年(nián)10月 金屬切削機(jī)床產(chǎn)量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數(shù)據